A review of visual inertial odometry from filtering and optimisation perspectives
- ժҪ
- 1.����
- 2.�����˲��ķ���
-
- 2.1 IMU���������˶�ģ��
- 2.2 ״̬����ʾ������
- 2.3 �Ӿ��۲�ģ�������
- 3.�����Ż��ķ���
-
- 3.1 ��������
- 3.2 ���ܶ���
- 3.3 ���Բ�����
- 4.�����˲����Ż���������ϵ
-
- 4.1 ����EKF����
- 4.3 �ؼ�֡��Ե��-Marginalisation
- 5. ״̬�ɹ۲����������ʶ����
- 6.����
�������https://blog.csdn.net/qq_38373843/article/details/91360043
ժҪ
??�Ӿ�������̼�(VIO)��һ�����û����������IMU�������IJ������ݣ������ƶ�ƽ̨λ�úͷ�����ʱ��仯�ļ�������������VIO����ߴ�С�ʹ�����ģ��۸�������ܵ��˴����о��ߵĹ�ע�����ڸ���DZ�ڵ�Ӧ���еõ��˹㷺��Ӧ�á�Ȼ�������ǵ����ȡ�ʵʱ�ԡ�³���Ժ����й�ģ�������Ǽ����������߹���ʵ�ֶ��dz�������ս�ԡ���������˲����Ż����������汨����VIO��������״�������ַ������о�����ռ������λ��
1.����
??��λ�뽨ͼ�ǻ����˵���������о�����������������⡣SLAM������SFM���˶��ָ��ṹ������[1]�ֱ��Ϊ�����˺ͼ�����Ӿ��о��������������Ҫ����֮һ���������ǶԽ���Щ����Ӧ����С��ƽ̨(��С�����˻����ֳ��ƶ��豸)����Ȥ����Ũ��λ�ͽ�ͼ���о��ص���ת��������Բ�����Ԫ��������ʹ�á�����оƬ�����ӻ�еϵͳ(MEMS)�豸�Ŀ��ٷ�չ����Щ��������ʼ���и߾��ȡ�С�ͻ��͵ͳɱ����ص㡣����֮����ij�̶ֳ����ǻ����ģ�ͨ�������ṩ��������Ϣ�����ֲ����ԵIJ��㡣���⣬����ѧ�о������������һЩ����ĵ������������ڶ�����ʽ���˶�����ģʽ���Ӿ��Ľ�ϡ�[2-4]
??��λ�뽨ͼ�����ǻ������е�״̬�������⡣���ڸ������������Ķ�̬ϵͳ����������㷨����չ�������˲���(EKF)�������˲���(PF)�����������ߡ�
??�˶�ģ����һЩ�ڲ��������ṩ����̬��ʱ��仯�IJ�����������ʾΪһ�������������ƶ�ƽ̨�˶�ģ�͡����������ƶ��������еĹ��������ͷ��л������е�IMU���������ۻ�����ƫ�ò��������������˶�ģ��ʹ�� IMU��ѧ���������������ݣ�
??����ģ����һЩ�ⲿ������������������ǣ��ܹ��ṩ�ǶȻ����������������Dz��������߷����ܹ������ƶ�ƽ̨��λ�û����ƵĿɿ����ںܴ�̶���ȡ���ڻ�������������Բ����������С�Ȼ�������ǿ�����Ϊ״̬��������IJ���ģ�͡�������ģ��ʹ�� ������״�IJ������ݣ�
??EKF��PFͨ���ں϶�̬ģ���еķֲ��Ͳ���ģ���еķֲ��������Ƶķֲ���ǰһ����������ǰһ�����ڴ��������£�EKF����PF����ΪҪ���Ƶ�״̬�����ܴ�Ȼ���Ƹ�˹�ֲ��ľ�ֵ��Э���
??�Ӿ��˶������Ǽ�����Ӿ������һ���Ż����⡣ͨ��ͼ�����������������̬�ı仯[6,7]��ͨ���������Ǵ�һ��ͼ������ȡ������Ȼ����ͶӰ����һ���Ӳ�ͬ�ӽDz����ͼ���С��ڴ˻����ϣ���С����������ͶӰ����֮��������ۣ��õ����������̬�仯�ͻ����ṹ���Ż�����Ҫ�ǻ����ݶȵģ���ţ�ٷ����˹ţ�ٷ����ڴ��������£����þ����ϡ��ṹ�������Ч�ʡ�ֻ�ṩ����״̬��ֵ����û�й��ڹ��Ʒֲ�����Ϣ��
??�ڱ�Ҷ˹��������½����˲������Ż���֮�����ϵ���Ż�����������һ�������Ȼ(ML)��ʽ�����е������ҵ������ܸ�����ߵ�״̬���˲�����������һ��������(MAP)��ʽ������ƽ̨��̬������ֲ��ɱ���о��������IJ���ֵ���ɣ���Ȼ�ֲ�������ܴ������IJ���ֵ���ɡ����ڷ����Զ�̬ģ�ͺ�/������Բ���ģ�ͣ�����EKF�ȼ��ڻ����Ż��ķ�������������EKF�е�ÿһ�����Ż�������ͨ�����������ڲ�������������Դ��������������������ML�������±���ΪMAP���⡣��Щ����������㷨�����е�ǰ���������ڵ�ǰ����ǰ�IJ��������������㷨�����������̣����е�ǰ�������������������ݼ������߿���˵�����Dz��������ڵ�ǰ����ǰ�IJ��������һ�������δ���IJ��������Ż����У����������ֽ�Ϊ���һ�����Դ������̡����˲����У�������ƽ���㷨����ͨ��ǰ��ͺ������ַ����õ������˹�ֲ���
??������SLAM�����ܹ��ṩƽ̨��̬�ͻ����ṹ�Ĺ��ƽ������Ҫ�ջ������Լ�������㷨�������ۻ����[8-10]�����ǣ�VIO������û����ʽ��ִ�бջ���⡣��ˣ�VIO�еĹ��ƴ����ۻ�����������Լ������������û�бջ���⣬С���豸����ʵ�ֳ�ʱ����ģ�Ķ�λ������о�������ת�������������Щ�����������������ӡ�
??���Ľ�����VIO���������·�չ�ͽ�չ�����˲����Ż��ĽǶȣ�˵�������ǵĻ���ģ�͡��㷨������Ľ�������黹��ͻ�����ַ���֮�����ϵ������VIO������������Ľ��ܡ���״̬�ɹ۲��ԺͲ����ɱ�ʶ�Խ��������ۡ��ܽ��˶�VIO�о������չ����
2.�����˲��ķ���
??EKF���һ����Ԥ�ⲽ����²�����ɡ������˲���VIO�����Դ������ܹ��ṩ������ٶȺͽ��ٶȲ���ֵ����Ϊ��ά�����˶�������������̬ģ�ͻ�����ֲ�������Ԥ�ⲽ���н����˶�Ԥ�⡣����ܹ��ṩ�������ƶ�ƽ̨֮��ĽǶȺ;����������Ϊ����ģ�ͻ���Ȼ�ֲ������ڸ��²����и���Ԥ������
??�������ֻ������ͷ��IMU���ƶ�ƽ̨����δ֪�������ƶ��������IMU֮��Ŀռ��ϵ�ǹ̶��ģ����Ա�ʾΪ��֪��λ�ú���̬������EKF��VIO�㷨Ŀ�������ù��Բ�����δ֪�������Ӿ��۲��ṩƽ̨��λ�úͷ�����Ϣ����������������[11]��EKF��ܽ���ȫ�������������״̬��ʾ��IMU���������Ķ�̬�Ϳ��ӻ��۲졣
2.1 IMU���������˶�ģ��
��ά��������ʱ�̵�IMU״̬��������һ��16��1���������壺

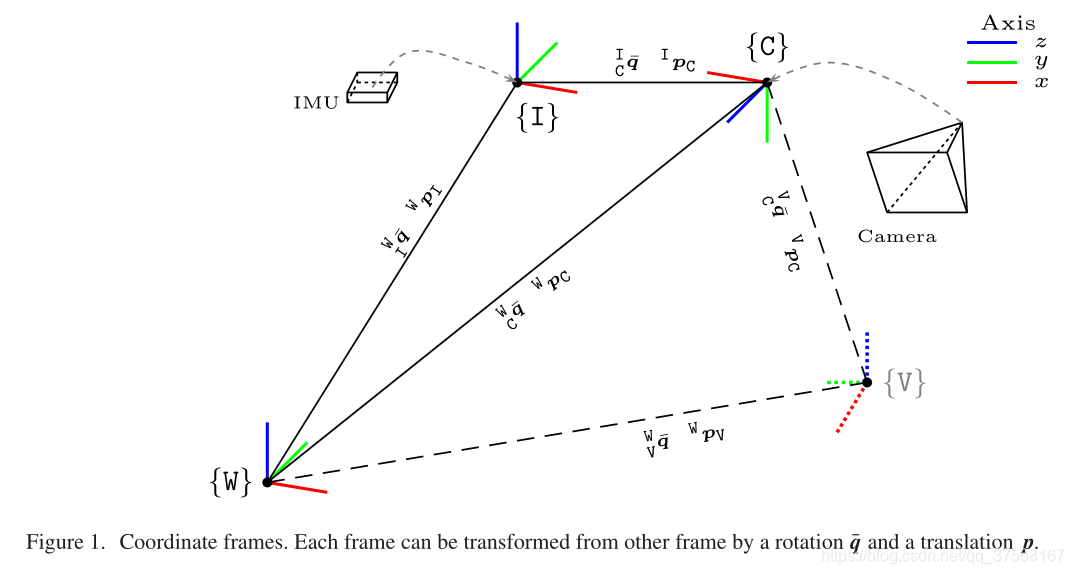
q?WIT{\overline q_W^I}^Tq?WI?T����������������ϵ��IMU����ϵ��ת�ĵ�λ��Ԫ������ת�� q?T=[q0,q1,q2,q3]\overline q^T=[q_0,q_1,q_2,q_3]q?T=[q0?,q1?,q2?,q3?]��pT��vTp^T��v^TpT��vT���������������ϵ��λ�ã�ƽ�ƣ����ٶ�pT=[x,y,z]��vT=[vx,vy,vz]p^T=[x,y,z]��v^T=[v_x,v_y,v_z]pT=[x,y,z]��vT=[vx?,vy?,vz?]��bgT��baTb_g^T��b_a^TbgT?��baT?��һ��3��1������ bgT=[bgx,bgy,bgz]��baT=[bax,bay,baz]b_g^T=[b_{gx},b_{gy},b_{gz}]��b_a^T=[b_{ax},b_{ay},b_{az}]bgT?=[bgx?,bgy?,bgz?]��baT?=[bax?,bay?,baz?]���ֱ����������Ǻͼ��ٶȼƵ�bias��ͼ1��ʾΪ��������ϵ֮��Ŀռ��ϵ��
����������һ��ֻ����һ�������̬��ϵͳ״̬�������Ա�ʾΪһ��24��124\times124��1ά������

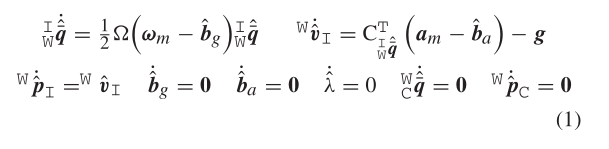
����״̬����ʱ��t�ĵ���Ϊ��
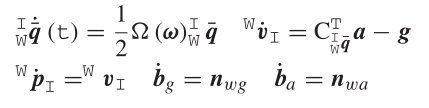
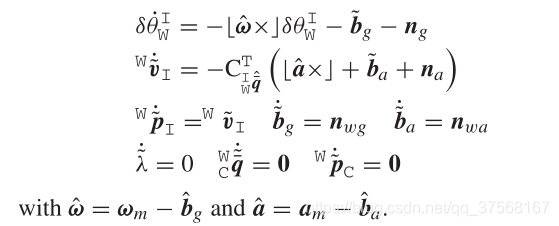
������Բ����������ֵ��˹ģ�͵���������ng��nan_g��n_ang?��na?��ʾ��ʵ�ʽ��ٶȦغ�ʵ�ʼ��ٶ�a�������Ǻͼ��ٶȼƲ����йأ�wm��amw_m��a_mwm?��am?Ϊ�����Ľ��ٶ�����ٶȣ�����ʽ���£�

����ʽ����ɵã�

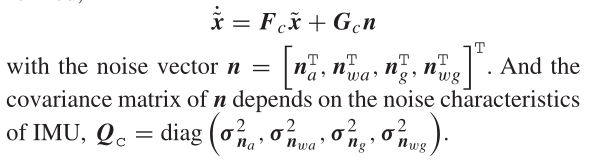
������״̬�Ĺ������£�

xkx_kxk?��ʾkʱ�̵�״̬��zkz_kzk?��ʾkʱ������Ĺ۲�ֵ��np,kn_{p,k}np,k?��ʾ�� p �� k ʱ�̵IJ�����˹��������ѭnp?N(0,Q)n_p\sim N(0,Q)np??N(0,Q)��fff��ʾ�˶�ģ�ͣ��˶����̣���
2.2 ״̬����ʾ������
���ù��Ƶ�״ֵ̬����ʵ״ֵ̬�������µ�ǰ״̬����Ҫʹ�õ���˹�ֲ��ľ�ֵ��IMU�������Э������������״ֵ̬x^\hat xx^,ʵ�ʲ���״ֵ̬xxx��
����С��ת��
���״̬��������һ��22��122 \times122��1ά��������

����ʱ�����״̬���ַ����ǣ�
ͨ�������״̬�ַ��̽��е��ӣ����Եõ����Ի�������ʱ�����״̬���̣�
����EKF��VIO��ܵľ�ֵ��Э����������ܽ�������
1����IMU���ݦغ�ama_mam?��һ������Ƶ���¿������˲���ʱ��״̬����ͨ�����̣�1������ֵ���ִ�����
2�� �ֱ𰴹�ʽ��4���ͣ�5������Fd��QdF_d��Q_dFd?��Qd?;


3������״̬Э��������ɣ�3������ó���

����EKF�˲�����Э���������Ϊ��
2.3 �Ӿ��۲�ģ�������
??����IMU�����е�ƫ�������������ʱ������ƣ�Ԥ�ⲽ���Ԥ����Խ��Խ������Ӿ��������IJ������ܹ��ṩ�ؼ���Ϣ���������ӵ�����EKF����£���ͼ������ȡ�Ĺؼ���ϢӦת��Ϊ�������̡�����Ϸ�����ʹ��ͼ�����ֱ�ӻ��λ�úͷ���仯����ͨ��EKF��ܽ��������ƽ���ں���һ�𡣽���Ϸ�����ʹ�ô�ͼ������ȡ�Ĺؼ���Ϣ���ؼ���Ϣ������ͨ�������������ͼ������ȡ�����������������Ϣ��ֱ�ӹ�ǿ�ȣ����ƣ������߰�ֱ�ӹ�ǿ�Ⱥ������Ϣ��֮�ؼ���Ϣ��ģΪ�۲ⷽ�̣��Ӷ��ṩ�ؼ���Ϣ��״̬����֮��Ľ�����ϵ��һ����˵��һ�������Դ������̿��Կ����ǹ۲ⷽ�̣�

����xkx_kxk?��ʾkʱ�̵�״̬������ hhh��ʾ�۲ⷽ�̣�zkz_kzk?��ʾ��״̬xkx_kxk?�ǹ۲�����ݣ�nm,kn_{m,k}nm,k?��ʾkʱ���Ӿ������ĸ�˹������
���Ի����������������ʽ��ʾ��

����HHHΪ�ſɱȾ���nmn_mnm?������Ϊ��˹�ֲ�����״̬����ء�z^\hat zz^ �� zzz �ֱ��ʾԤ���ʵ�ʲ���ֵ��
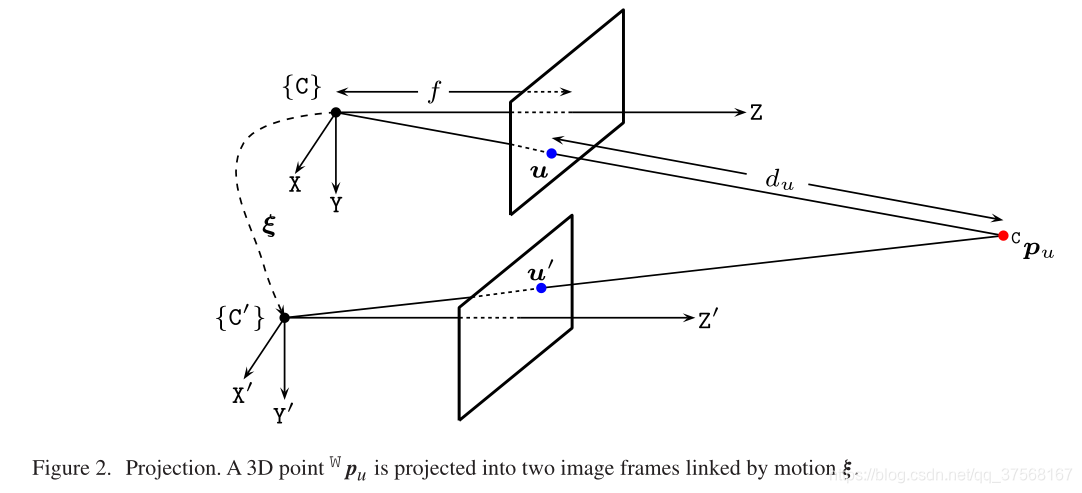
??����������Ϊ�Ӿ���Ϣ����ֱ�ӵķ������������ģ�ͽ����������ϵ C{C}C �IJ������̡���ȡͼ���е� u=[u,v]=[u ,v]=[u,v]������ʾ�ؼ���Ϣ�����ȣ������֡�е�u��������֡W{W}W�е�pwp^wpw��֮��Ŀռ��ϵ�������·��̣�

��PuwP_u^wPuw?��ʾ��������������ϵ�µ�����, PCWP_C^WPCW?��ʾ�������������ϵ�µ����꣬PuCP_u^CPuC?��ʾ�������������ϵ�µ����ꣻ
����������K��

������һʱ��״̬�����ʾ����������棬��Ҫ��ԭ������֮�ϼ����������ֵ��
�����������

�����ĸ��¹����ܽ�������
1�����Ӿ����ݣ�ͨ����ԭʼͼ����һ������Ƶ���¿���ʱ������һЩͼ������������ȡ�ؼ���Ϣ��
2�����չ�ʽ��7������в
3�����չ�ʽ��8�����㿨��������K��
4��ͨ�����������������µ�ǰ״̬���ۼ�������ʽ��
5�����չ�ʽ��9������״̬���Э�������
3.�����Ż��ķ���
??�����Ż��ķ�����Ҫ����ͼ������������������ȡ��ͼ������Ż��������Բ���ֵ����Ϊ��������������ȫ���ԡ��ڴ��������£������Ż��ķ����������Σ���ͼ���١��ڽ�ͼ�Σ�ͨ�����������������ͼ������ȡ�ǡ��ߵ���ά�ռ��������Ȼ��������ͼ��֮��Ϊ����������������һ����ͶӰ�������Ϊһ����ʧ�����������Ż����Ա��ҵ�������ر�����ꡣ�ڸ��ٽΣ����õ�ͼ�е���͵ر����������������ͼ��֮�����ͶӰ�����ٴ�Ӧ���Ż��㷨��Ѱ���ƶ�ƽ̨��λ�úͷ���ı仯������������ֽ�Ϊ�����ε�˼����Ϊ���ڽ�ͼ���̺�ʱ������»�ÿ��ٵĸ��ٽ����[14,15]����3d����������ƶ�ƽ̨λ�˱仯������ͼ��֮������ͶӰ�����������ʧ��[19]����ͬʱ�����Ż��������ùؼ�֡�ĸ�����Խ���״̬��Ե�����Ӷ�ά��һ�������Ż����ڽ���ʵʱ������
3.1 ��������
??�����������Ż�ͨ����С��ͼ���й۲��������ͶӰ�����Ѱ�������λ�˱仯���������ꡣͨ������ͼ�����ɹؼ�֡�б�ʶ��������ɣ�����Щ�ؼ�֡�п����ҵ���Ҫ����������ͼ��һϵ����������ά����������ʾ�������һ���µ�ͼ��ʱ��Ӧ�þ������Ƿ���һ���ؼ�֡������ǣ���ͨ��ͼ������㷨�����ڸ���ͼ���з��ֵ������������꣬���뵱ǰ�������һ�����ӵ���ͼ�С�����ͼ�����ֲ��䡣
��ͼ2��ʾ����ά����任 T��SE(3)T��SE(3)T��SE(3) ��ʾ��ά�е���ת��ƽ�ƣ�

??�任����SE(3)SE(3)SE(3)��Ӧ�������se(3)se(3)se(3)����=[wT,vT]T��R6\xi=[w^T, v^T]^T\in R^6��=[wT,vT]T��R6,����www��ʾ��ת����w��so(3)w\in so(3)w��so(3), vvv��ʾƽ������v��R3v\in R^3v��R3,��˿ɵ������se(3)se(3)se(3)�ķ��Գƾ�����(��)\Psi(\xi)��(��)��������(��)��R4��4\Psi(\xi)\in R^{4 \times 4}��(��)��R4��4��

��֪����ڲ� ��\pi�����Լ��������ϵ�µ�3D�� PuCP_u^CPuC?����������õ���ͼ������ϵ�µ������ u��

��ʽ��fu,fvf_u, f_vfu?,fv?��ʾ���x,yx, yx,y�����ϵĽ��࣬u0,v0u_0, v_0u0?,v0?��ʾ���x,yx, yx,y�����ϵ�ƽ�ơ�
����任�������£�����ͼ����������� u �Լ��õ�������Ϣ dud_udu? �����Լ���õ��������ϵ�µ�3D�� PuCP_u^CPuC?��

������ͶӰ�����

����z^=[u^,v^]T=��(��^,P^uW)\hat z=[\hat u, \hat v]^T=\pi(\hat \xi, \hat P_u^W)z^=[u^,v^]T=��(��^?,P^uW?)��ʾ��������任Ϊ�������꣬����ͶӰ����������꣬zzz��ʾ�۲���������ꡣ
���е����ͶӰ��

���� www ��ʾȨ�ز�������IMU��Э����������У�jjj ��1�� mmm ��֡�ڹؼ����������iii ��������СΪ nnn �Ĺؼ�֡����
��С����ͶӰ���������任���� TTT:

ͨ���Ż�����ʧ�������ҵ�ʹ��ﵽ��Сֵʱ��Ӧ�� ��\xi����PuWP_u^WPuW?�������������ķ���Ҳ������Bundle Adjustment��BA������ƽ���Ż�����
??��PTAM��, �Ż����̱��ֳ����������̣߳���ͼ���١��������ٽ�� ��^\hat \xi��^?����ͼ�߳��е��Ż������ǣ�

������ͼ��� PuWP_u^WPuW?�������߳��е��Ż������ǣ�

??��Levenberg-Marquardt��LM���㷨�У��ؼ�����ÿ������������Ѱ������ �Ħ�����Ȼ������Ż����״̬�������Ħ��� �Ľ���ͨ����

���� HHH �� zzz ���ſɱȾ��������� �� LMLMLM ��������� WWW��Ȩ�ز�����IMU��Э�������
??�ڴ��������£�ֻ����ϡ��ؼ�֡�е��������������Ż����Ӷȣ���Ϊ�Ż����Ӷ�������˲��ķ�����ͬ��
3.2 ���ܶ���
??�����������У�ʹ��ͼ����������ر�����궨����ͶӰ�����ǣ�����Ҫ������ȡ���̣��ù�������������ȡ���ٵ��º�����ͼ��Ĵ֡�������ȡ���������������������³���Բ�Ļ����У���������ڸ��߲�ε�³���Թ��Ƽ�������Ϊ������Щ���Ʋ��費��ԭʼͼ�������ǿ�ȣ���ˮƽ�ϣ�����ϵͳ�ش���������ȡ�����ۻ�Ư�ơ�
??��һ���棬������ۺ����ļ����ǻ���ͼ��ģ�����ֱ�ӻ���ԭʼͼ������������С��[21]����ʹ�ù�ȣ����Ȼ�ǿ�ȣ���������˱���Ϊֱ�ӻ��ܼ����������ܷ�����Ŀ������������ͼ����ж��롣�������Ż�����������Ѱ����������֮���ת��������[22,23]ͨ��ʹ��Kinect RGB-D��������Ӿ���̱���ͼ����룬�����������͡�
??����RGB-D���������Kinect�����������ص������Ϣ����ͨ����С��ÿ��ͼ������������֮��ľ����������������������������ر����������ʵ�ֶ��ɨ��Ķ��롣���ֳ���ɨ���ܹ��ؽ������еı��泡��������λ�ˡ����������������ܼ���Ȳ������Ӳ�ͬ�Ƕȹ۲�ͬһ��̬�������������ά���ƣ�����ͨ�����һ�����Ƶ���һ�����Ƶ����ӳ����Ա任���������λ�˵ı仯��
??������ӽ��㣨ICP����ͨ���Ż����Ա任��ƥ��ɨ��ij����㷨��ICP�Ĺ���ԭ���ǣ�����������Ӧ�ĵ㼯����={��1��???����n}��=\{��_1������������_n\}��={
��1?��???����n?}�� ��={��1��???����n}��=\{��_1������������_n\}��={
��1?��???����n?}������֮���ƽ�ƺ���ת�ֱ��� t��R��t��Rt��R��t��Rt��R��t��R��ͨ����С��ƽ�����͵õ���

??���֪����ȷ�Ķ�Ӧ��ϵ����ת��ƽ�ƿ����Ապ���ʽ���㡣������������һ������ȷ�Ķ�Ӧ��ϵ��δ֪�ģ�ͨ��������һ���ҵ���ѵ������ת��ƽ�ơ�ͨ�����ұպϵ�Ķ�Ӧ��ϵ��Ѱ���ҵ�����ĵ����������ʼλ���㹻�ӽ���ʵ�任����ICP������
3.3 ���Բ�����
??IMU�������IJ����ǻ����˲�����������������ά�����˶�����ѧ������Դ����ͨ��Kalman�˲���������IJ��������ںϡ����ǽ�����ϵģ���Ϊ������������֮��Ľ��淽�����ϵ��ں���ͨ��EKF���Ӿ��������Ѿ����Ƶ���̬��IMUԤ�����̬�ںϣ��Ӷ����ֺ㶨�Ĵ���ʱ�䡣
??�ڻ����Ż��ķ����У���������֮����ں�Ҳ���Խ��ܵؽ��У�������Ҫ�����������ȷ����̬���ơ������̣�1����IMU��������ѧ��Ԥ������Ϊ��˹�ֲ�����Ԥ��������ʵ״̬֮������ת��ΪЭ�����Ȩ��ƽ����Ȼ����Ϊ���������ӵ������С����ݱ�Ҷ˹�ƶϣ��������Ϊ������ʣ���ͼ��������Ϊ��Ȼ���ʡ��Ż���Ľ���Ǻ���ֲ���������IMU����ƽ���Ĵ�ͼ�����������Ȼ���ƽ���õ��ġ�
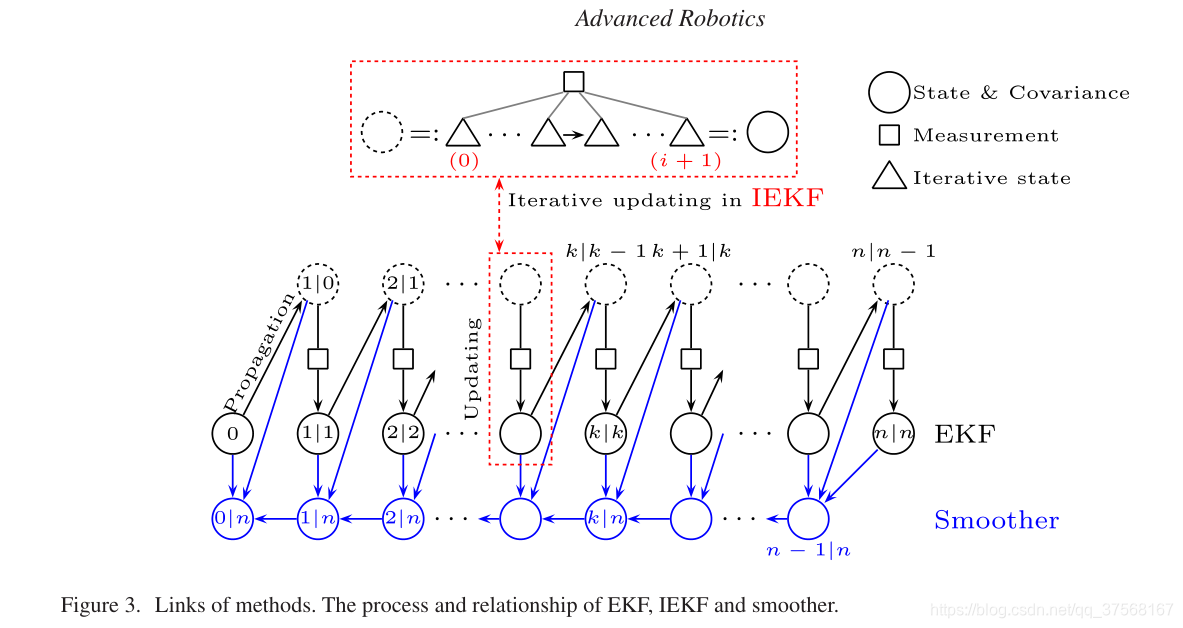
4.�����˲����Ż���������ϵ
??�ڱ�Ҷ˹�����£������γɻ����˲��ͻ����Ż��ķ���������Ҫ�������Ի�������ʱ������ͨ��������EKF��ʽ�ؽ������ǵ����ӡ����������Ի���Ϊһ��ʱ������ǰ����̺ͺ�����̵Ļ���ƽ���ķ����ȼ���ͨ����Ϣ�����Cholesky�ֽ����Ļ����Ż��ķ�����Ϊ�˽��ͼ��㸴�Ӷȣ�ͨ��ֻ�����ؼ�֡������������Ҫ���Ƶ�״̬�������ر�أ��������ڷ������ƽ�����Ϊ�����֣�ʵ���������ֵ�һ�ֳ��÷�������һ�������Ż����������һ������ʹ��EKF��Ե�����״̬��
4.1 ����EKF����
??�˲����ĺ����ǿ������˲����Ż����ĺ����Ǹ�˹ţ�ٷ�������֮�����ϵ�ǵ���EKF (IEKF)��EKF���������裺Ԥ����¡��赱ǰʱ�� k ��Ԥ�ⲽ����Ϊ x^k?N(xk��Pk)\hat x_k \sim N(x_k��P_k)x^k??N(xk?��Pk?)�� EKF��IEKF����������IEKF�ĸ��²����д��ڵ���ѭ������EKF�ĸ��²�����ִֻ��һ��ѭ�������Ż����У�IEKF�ĵ���ѭ���ܹ�ʹģ�����Ի�����������ܽӽ�����Ӧ����
??���棬���ǽ�չʾIEKF���²����еĵ���ѭ�����˹ţ���Ż�����(ML)�ĵȼ��ԡ�
������������˹-ţ�ٷ�����������ѭ������ΪIEKF����������£�
1����ʼ��״̬��i=0��u(0)=x^k�Ok?1��Pk�Ok?10=Pk�Ok?1i=0��u^{(0)}=\hat x_{k|k-1}��P_{k|k-1}^{0}=P_{k|k-1}i=0��u(0)=x^k�Ok?1?��Pk�Ok?10?=Pk�Ok?1?;
2��ѭ���������״̬��Э�������
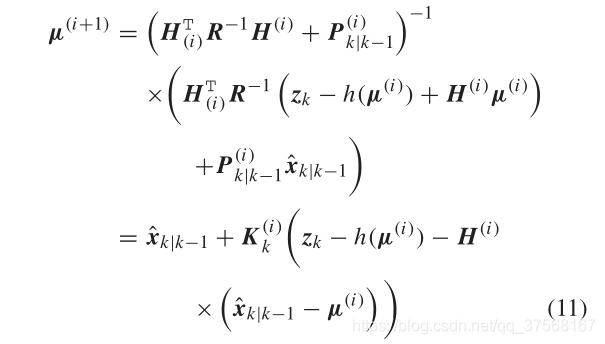


3�����ո��£�

����֮������ӡ�EKF��IEKF��⻬���Ĺ������ϵ��
4.3 �ؼ�֡��Ե��-Marginalisation
��������˹ţ�ٷ��̣�����ʽ��
J(x)TJ(x)��x=?J(x)f(x)J(x)^TJ(x)\Delta x=-J(x)f(x)J(x)TJ(x)��x=?J(x)f(x)
����J(x)J(x)J(x)��ʾ�ſ˱Ⱦ�����x\Delta x��x��ʾ����������f(x)f(x)f(x)��ʾ������
���裬��A=J(x)TJ(x)A=J(x)^TJ(x)A=J(x)TJ(x)��b=?J(x)f(x)b=-J(x)f(x)b=?J(x)f(x)��������AAA�Ƿ��ɷֿ飬�پ����������б任��ת��Ϊ����ʽ�ӣ�
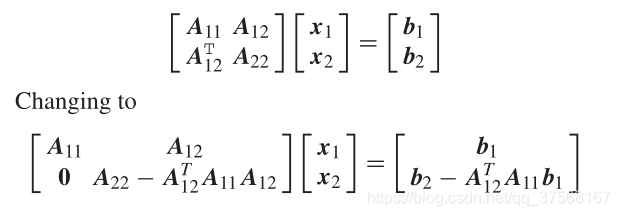
��˿��Խ�״̬ x1x_1x1? ��Ե��������״̬ x2x_2x2?������ʽ��

5. ״̬�ɹ۲����������ʶ����
??VIO����������ǣ��ڸ������Ժ��Ӿ�����������ֵ������£����ָ�ȫ��֡�е�ƽ̨�켣��Ȼ�����ӹ���ʵ�ֵĽǶ�������������Ⲣ��������������˲������Ż����ĸ������⣬һЩ�������ڱ�ʾƽ̨�켣��̬״̬���Ƶijɹ����Ҳ����������Ҫ�����á���Щ����������
- ����ڲΣ����ࡢ����;�ͷ���䣻
- IMU���������ٶȼƺ�������ƫ�
- �ռ������IMU�����֮���ת����
- ʱ�������IMU���������֮���ʱ���ӳ٣�
��IMUƫ�ú�ϵͳ�����⣬���DZ���Ϊʱ����������෴��ƽ̨�켣��ʱ�������ʾ��״̬��
??ͨ���Կɹ۲��ԺͿ�ʶ���Եķ�����������IMU��������IJ���ֵ���Ϳ��Իش���Щ״̬�Ͳ����Ƿ���Իָ������⡣��ͳ�����ϣ�״̬�Ƕ�̬�������ÿɹ۲��Է���״̬�������⣬�����Ǿ�̬�������ÿɱ�ʶ�Է���״̬�궨���⡣����������߹��̶Բ������н�ģ���������ÿɹ۲���(��IMUƫ��)�Բ������з�����
6.����
??�������Ӿ�������̼�(VIO)���о���״���������Ǵ������Ƕ�����ģ����ڹ��˺ͻ����Ż��ӽ�����Ҳ��ͨ�������Ӿ��ź��������������ַ�ʽ�����������ͻ��ڳ��ܡ�EKF��ͼ�����Ĺ㷺֪ʶ�Ѿ�ͳһ����ͬһ��ܡ����ַ���֮�����ϵ�Ե���EKF��ƽ�����ͱ�Ե��Ϊ�������������ַ��������������о���������ϵͳ��״̬�ɹ۲��ԺͲ����ɱ�ʶ�ԡ����Ļ��ܽ��˸������һϵ�м���������EKF��MAP��IEKF��BA��ICP��MHE�ȡ����̽����Щ����ļ��㸴���Խ�Ϊ�������ʵ�����ṩ��ֱ�۵�ָ������Ϊ�������һ����ɲ��֣�Ӧ�ṩ�����ʵʩϸ�ڡ�