Poisson Matting
����Ŀ¼
- Poisson Matting
-
- Global Poisson matting
- Local Poisson matting
���ɿ�ͼ�������Ľ���ʽ��ͼ�㷨���Ѿ����㷺Ӧ����ͼ�����ĸ��������С�
Global Poisson matting
��ͼ���ǴӸ��ӳ����о��Ŀٳ�Ŀ���������ں�������������ͼ������������ѧ���壺
I=��F+(1?��)B(1)I=\alpha F+(1-\alpha) B\tag{1} I=��F+(1?��)B(1)
��ͼ��I(x,y)I(x,y)I(x,y)�����DZ���ͼ��B(x,y)B(x,y)B(x,y)��ǰ��F(x,y)F(x,y)F(x,y)����Ȩ����(x,y)\alpha (x,y)��(x,y)�ںϵõ��ģ���ͼ���Ǵ�ͼ��III�м���õ�Ȩ����\alpha���Ĺ��̣����ĵĺ���˼�뼴��ͨ����Ⲵ�ɷ��������ʽ���̵���⣬ȡ��ʽ������ʽ��
?I=(F?B)?��+��?F+(1?��)?B(2)\nabla I=(F-B) \nabla \alpha+\alpha \nabla F+(1-\alpha) \nabla B\tag{2} ?I=(F?B)?��+��?F+(1?��)?B(2)
����?=(??x,??y)\nabla=\left(\frac{\partial}{\partial x}, \frac{\partial}{\partial y}\right)?=(?x??,?y??)Ϊ�ݶ����ӣ����豳��ͼ��BBB��ǰ��ͼ��FFF�������㹻ƽ���ģ���ô��ʽ����?F+(1?��)?B\alpha \nabla F+(1-\alpha) \nabla B��?F+(1?��)?B��Խ�С�����������½��ƣ�
?����1F?B?I(3)\nabla \alpha \approx \frac{1}{F-B} \nabla I\tag{3} ?����F?B1??I(3)
����ζ��Ȩ��ͼ��\alpha�����ݶ���ͼ��III���ݶȳ����ȣ�����ͼ��ʾ��Ԥ�ȶ���ͼ���ǰ��������F\Omega_{F}��F?������������B\Omega_{B}��B?��δ֪������\Omega��������ͼ���е�����һ��p=(x,y)p=(x,y)p=(x,y)��IpI_{p}Ip?��ʾ��ǰ�������ֵ��Fp��BpF_{p}��B_{p}Fp?��Bp?�ֱ��ʾǰ����������������ֵ�����δ֪����ı߽������¶���:
?��={p�ʦ�F�Ȧ�B�ONp�ɦ���?}(4)\partial \Omega=\left\{p \in \Omega_{F} \cup \Omega_{B} \mid N_{p} \cap \Omega \neq\oslash\} \right.\tag{4} ?��={
p����F?����B?�ONp?����??=?}(4)
����ʽ(3)�������\alpha����Ҫ֪��F?B��?IF-B��\nabla IF?B��?I������\alpha�����������ת��Ϊ��һ�±���������⣺
��?=arg?min?��?p�ʦ���?��p?1Fp?Bp?Ip��2dp(5)\alpha^{*}=\arg \min _{\alpha} \iint_{p \in \Omega}\left\|\nabla \alpha_{p}-\frac{1}{F_{p}-B_{p}} \nabla I_{p}\right\|^{2} d p\tag{5} ��?=arg��min??p����?��������??��p??Fp??Bp?1??Ip?��������?2dp(5)
���õ������ױ߽�������
��p�O?��=��^p�O?��={1p�ʦ�F0p�ʦ�B(6)\left.{\alpha}_{p}\right|_{\partial \Omega}=\left.\widehat{\alpha}_{p}\right|_{\partial \Omega}=\left\{\begin{array}{ll} 1 & p \in \Omega_{F} \\ 0 & p \in \Omega_{B} \end{array}\right.\tag{6} ��p?�O?��?=��
p?�O?��?={
10?p����F?p����B??(6)
��ʽ�ж���ı߽���������ͼ�и��������û�����ǰ������FFF����������BBB��һ�µġ���F(?��p?1Fp?Bp)F(\nabla\alpha_{p}-\frac{1}{F_{p}-B_{p}})F(?��p??Fp??Bp?1?)�����ݱ��ԭ��ʽ(5)���������ŷ����ʽ��
?F??��p?ddx?F??��p?ddy?F??��p=0(7)\frac{\partial F}{\partial \nabla\alpha_{p}}-\frac{d}{d x} \frac{\partial F}{\partial \nabla\alpha_{p}}-\frac{d}{d y} \frac{\partial F}{\partial \nabla\alpha_{p}}=0\tag{7} ??��p??F??dxd???��p??F??dyd???��p??F?=0(7)
���ò��ɷ��̣�
����=div?(?IF?B)(8)\Delta \alpha=\operatorname{div}\left(\frac{\nabla I}{F-B}\right)\tag{8} ����=div(F?B?I?)(8)
������=(?2?x2+?2?y2)\Delta=\left(\frac{\partial^{2}}{\partial x^{2}}+\frac{\partial^{2}}{\partial y^{2}}\right)��=(?x2?2?+?y2?2?)��divdivdivΪɢ���㷨��?\nabla?Ϊ������˹���ӣ����ڲ��ɷ��̵���ⷽ�����Բο�CS267: Notes for Lectures 15 and 16��

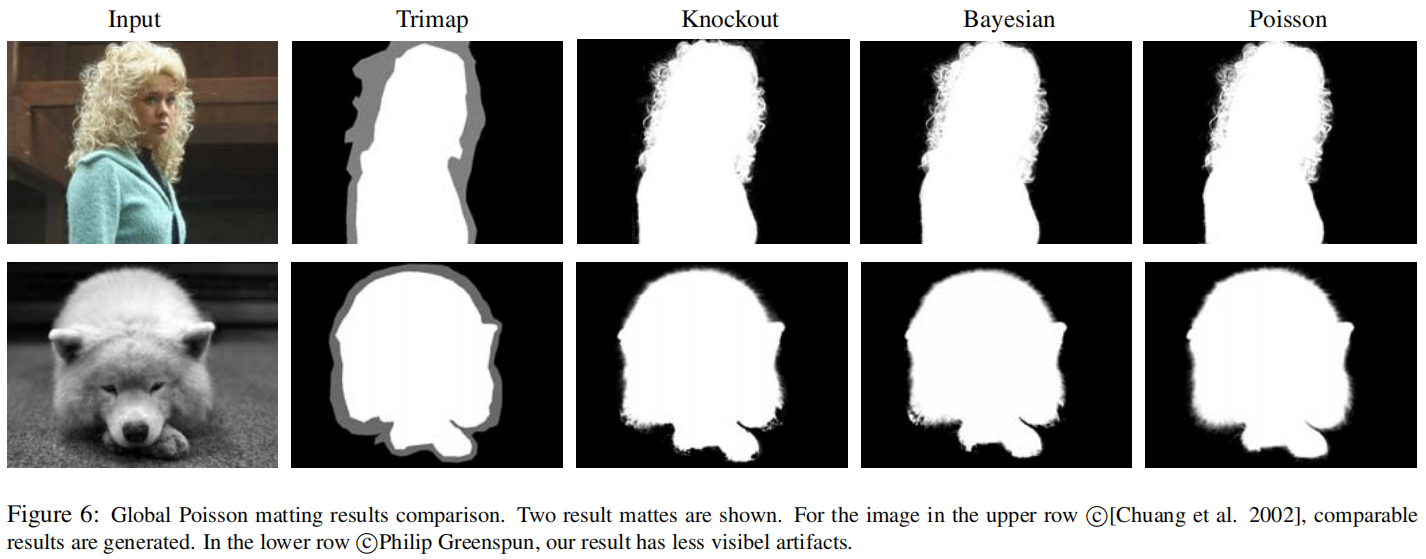
���ϻ��ڲ��ɷ��̵�ȫ�ֿ�ͼ�㷨��������Ҫ��ε������ܵõ��Ƚ�����Ľ������������������£�
-
��ʼ��F?BF-BF?B��δ֪������\Omega���е����ص�ppp���Ը���������ֵ��ǰ����������ֵFpF_{p}Fp?��������������ֵBpB_{p}Bp?�������Խ��г������֣��õ�F?BF-BF?B��Ϊ��֤F?BF-BF?B��ƽ���ԣ��ø�˹�˲�����ƽ��F?BF-BF?B����������������F��BF��BF��B��ȷ���ƴ�����Ӱ�졣
-
���ʽ(8)��ʾ���ɷ��̣��õ���\alpha��
-
�������õ�����\alpha������һ��ϸ����F��BF��BF��B�Ĺ��ƣ�
��F+={p�ʦ��O��p>0.95,Ip��Fp}��B+={p�ʦ��O��p>0.95,Ip��Bp}\Omega_{F}^{+}=\left\{p \in \Omega \mid \alpha_{p}>0.95, I_{p} \approx F_{p}\right\}\\ \Omega_{B}^{+}=\left\{p \in \Omega \mid \alpha_{p}>0.95, I_{p} \approx B_{p}\right\} ��F+?={ p�����O��p?>0.95,Ip?��Fp?}��B+?={ p�����O��p?>0.95,Ip?��Bp?} -
Ȼ����¶���F����B\Omega _{F}��\Omega_{B}��F?����B?�Ĺ��ƣ�
��F=��F�Ȧ�F+��B=��B�Ȧ�B+\Omega_{F}=\Omega_{F} \cup \Omega_{F}^{+}\\ \Omega_{B}=\Omega_{B} \cup \Omega_{B}^{+} ��F?=��F?����F+?��B?=��B?����B+? -
��˵������ϵ�2-4�������ɽ����\alpha��
Local Poisson matting
�ع�ǰ���ǰ������ͱ�������Ļ������裬�����ǰ������ͱ�������ƽ���Ļ�������ȫ�ֵIJ��ɿ�ͼЧ�����������ã���˽�ȫ�ֵIJ��ɿ�ͼ�����ٴλ���Ϊ�����ֲ������������ֱ���⡣��ʽ(2)��дΪ��
?��=A(?I?D)\nabla \alpha = A(\nabla I -\mathbf{D}) ?��=A(?I?D)
����A=1F?BA=\frac{1}{F-B}A=F?B1?��D=��?F+(1?��)?B\mathbf{D}=\alpha\nabla F +(1-\alpha)\nabla BD=��?F+(1?��)?B��AAA������\alpha�����յ��ݶ�ǿ�ȣ�D\mathbf{D}DΪ��ǰ������������ƽ�����������ݶȣ�����ǰ��ļ��輴����ΪD\mathbf{D}D�ӽ�0����D\mathbf{D}D���ٽӽ�0ʱ�����þֲ�������⡣��A?��D?A^{*}��\mathbf{D}^{*}A?��D?ΪA?��D?A^{*}��\mathbf{D}^{*}A?��D?��ground truth����ͼ����A��DA��\mathbf{D}A��D������ƶ�������\alpha�������Ӱ�졣
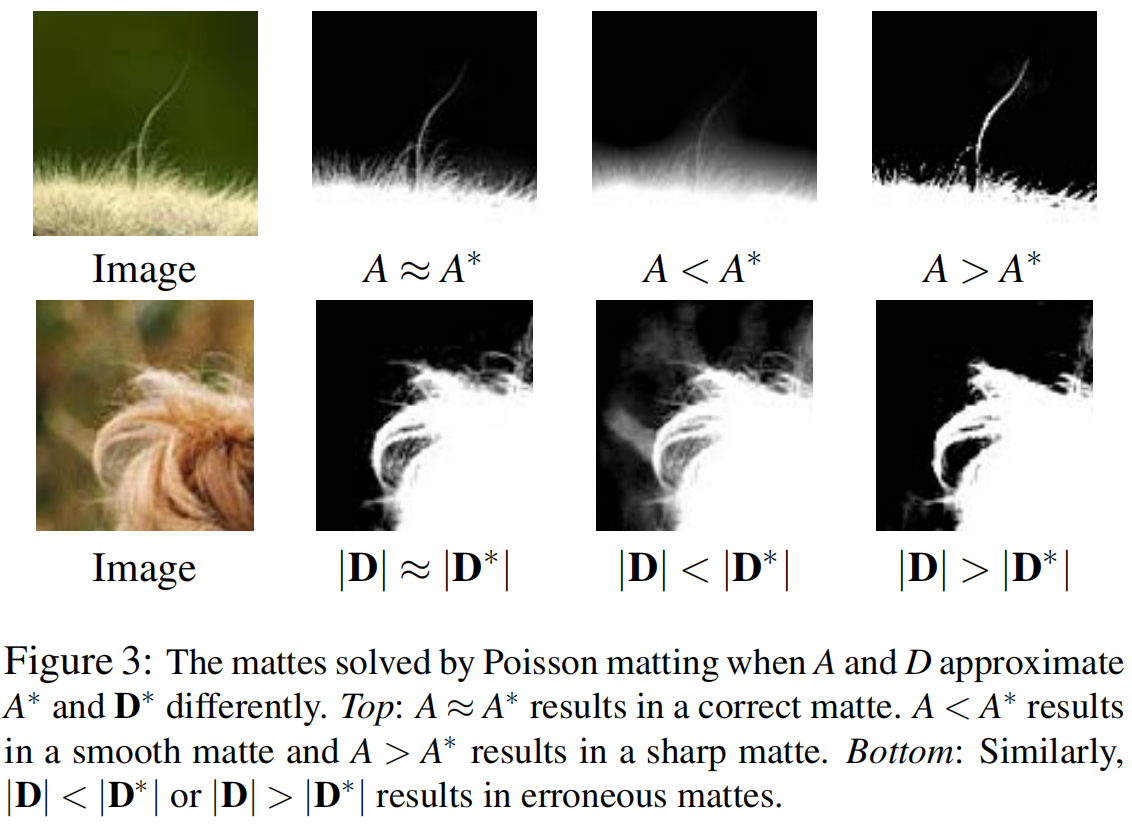
��Figure2.b����ʾ�����Դ�ȫ�ֲ��ɿ�ͼ��ָ���������������L\Omega _L��L?���оֲ�����Ľ�һ����ͼ�������µ�δ֪����߽磺
?��={p��(��L�ɦ�)?�ONp��(��L�ɦ�)��?}\partial \Omega=\left\{p \in \overline{\left(\Omega_{L} \cap \Omega\right)} \mid N_{p} \cap\left(\Omega_{L} \cap \Omega\right) \neq \emptyset\right\} ?��={
p��(��L?����)?�ONp?��(��L?����)??=?}
����������
��?=arg?min?��?p�ʦ�L�ɦ���?��p?Ap(?Ip?Dp)��2dp\alpha^{*}=\arg \min _{\alpha} \iint_{p \in \Omega_{L} \cap \Omega}\left\|\nabla \alpha_{p}-A_{p}\left(\nabla I_{p}-\mathbf{D}_{p}\right)\right\|^{2} d p ��?=arg��min??p����L?����?��?��p??Ap?(?Ip??Dp?)��2dp
��ʱ�ĵ������ױ߽�����Ϊ��
��p�O?��=��^p�O?��={1p�ʦ�F0p�ʦ�B��gp�ʦ�\left.{\alpha}_{p}\right|_{\partial \Omega}=\left.\widehat{\alpha}_{p}\right|_{\partial \Omega}=\left\{\begin{array}{cl} 1 & p \in \Omega_{F} \\ 0 & p \in \Omega_{B} \\ \alpha_{g} & p \in \Omega \end{array}\right. ��p?�O?��?=��
p?�O?��?=????10��g??p����F?p����B?p����?
������g\alpha_{g}��g?��ȫ�ֲ��ɿ�ͼ�����õ���δ֪����߽�㴦����\alpha��ֵ��