Poisson Image Editing
����Ŀ¼
- Poisson Image Editing
-
- Poisson solution to guided interpolation
- Seamless cloning
ǰ���������ϸ�ؽ���˿�ͼ��������� Poisson Matting��������������벴�ɿ�ͼ��Ϊ ������IJ����ں��㷨���벴�ɿ�ͼһ���������ںϵĺ���Ҳ�Ƕ�����������ױ߽�IJ��ɷ��̵���⡣
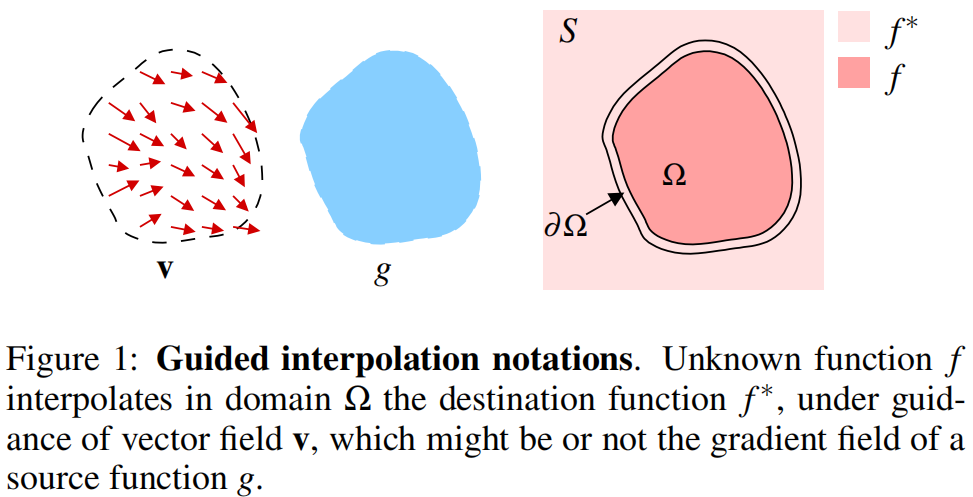
Poisson solution to guided interpolation
����ͼ��ʾ���������Ƕ����ֵ���⣺
SSS���������ںϵı�������
��\Omega���������ںϵ�ǰ������
?��\partial \Omega?����ǰ������ı߽�
f?f^{*}f?����������ĺ���ֵ����˵������ֵ
fff��ǰ������ĺ���ֵ��δ֪
v\mathbf{v}v��ǰ��������ݶȳ�
ggg��Ϊǰ������ĺ���ֵ
��˿��Խ������\Omega���ں���ֵfff�Ķ���Ϊ������С�����⣺
min?f?���O?f�O2with f�O?��=f?�O?��(1)\min _{f} \iint_{\Omega}|\nabla f|^{2} \text { with }\left.f\right|_{\partial \Omega}=f^{*} \mid \partial \Omega\tag{1} fmin??��?�O?f�O2 with f�O?��?=f?�O?��(1)
����?=[??x,???y]\nabla=\left[\frac{\partial}{\partial x}, \frac{\partial \cdot}{\partial y}\right]?=[?x??,?y???]Ϊ�ݶ����ӣ���������С������������Ҫ�������µ������ױ߽�������������˹���̣�
��f=0over ��with f�O?��=f?�O?��(2)\Delta f=0 \text { over } \Omega \text { with }\left.f\right|_{\partial \Omega}=\left.f^{*}\right|_{\partial \Omega}\tag{2} ��f=0 over �� with f�O?��?=f?�O?��?(2)
������.=?2?x2+?2?y2\Delta .=\frac{\partial^{2}}{\partial x^{2}}+\frac{\partial^{2}}{\partial y^{2}}��.=?x2?2?+?y2?2?Ϊ������˹���ӡ�
������С���������Ⲣ���ܵõ����������ͼ���ֵ�������������֪ǰ��������ݶ�������v\mathbf vv������ʽ(1)��ʾ����С������ת��Ϊ��
min?f?���O?f?v�O2with f�O?��=f?�O?��(3)\min _{f} \iint_{\Omega}|\nabla f-\mathbf{v}|^{2} \text { with }\left.f\right|_{\partial \Omega}=\left.f^{*}\right|_{\partial \Omega}\tag{3} fmin??��?�O?f?v�O2 with f�O?��?=f?�O?��?(3)
��ʽ(1)�жԺ���fff��Լ����ʽʵ��������Լ����\Omega�������ƽ���ԣ���˲�ֵ�����Ľ�����൱ģ������ʽ(3)�еļ�Լ����?��\partial \Omega?��������ȵ�ƽ���ԣ�ҲԼ������\Omega�������ں����ݶȳ���ԭ�ݶȳ�v\mathbf vv��������ԣ��˷��̵Ľ����������µ������ױ߽������IJ��ɷ��̣�
��f=div?vover ��,with f�O?��=f?�O?��\Delta f=\operatorname{div} \mathbf{v} \text { over } \Omega, \text { with }\left.f\right|_{\partial \Omega}=f^{*} \mid \partial \Omega ��f=divv over ��, with f�O?��?=f?�O?��
����div?v=?u?x+?v?y\operatorname{div} \mathbf{v}=\frac{\partial u}{\partial x}+\frac{\partial v}{\partial y}divv=?x?u?+?y?v?����ʽ���ǻ��ڲ��ɷ��̵�ͼ���ںϵĺ������ۣ�����Ҳ���ݶȳ�v\mathbf vv��Ϊ����(guidence field)
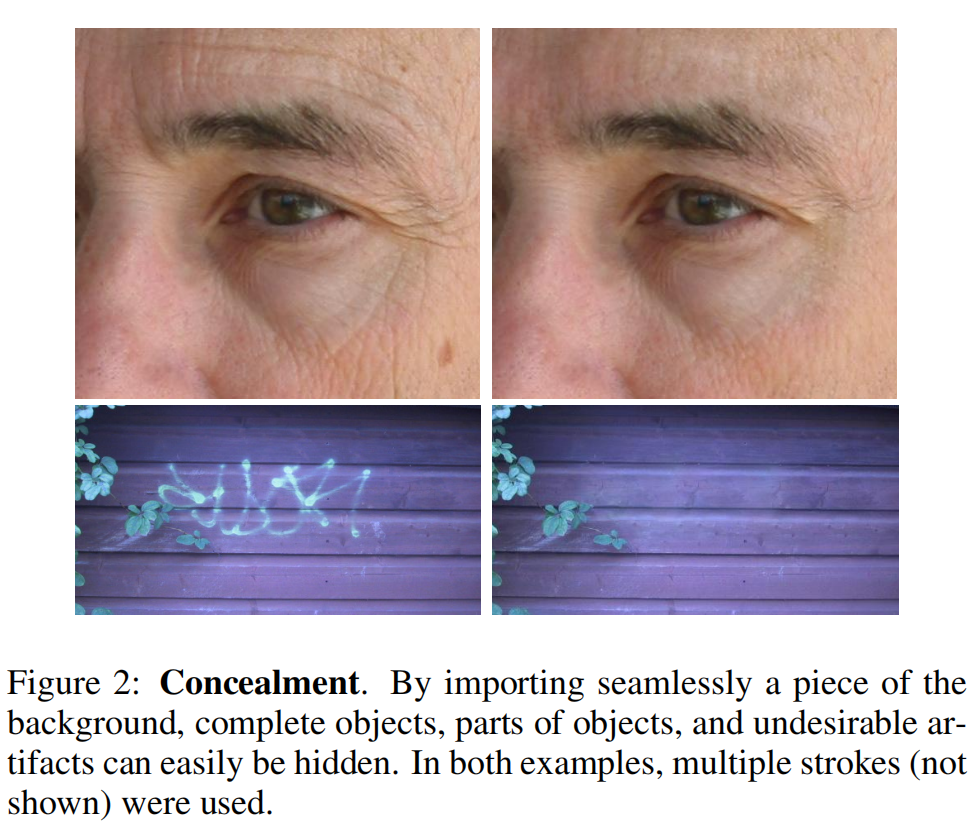
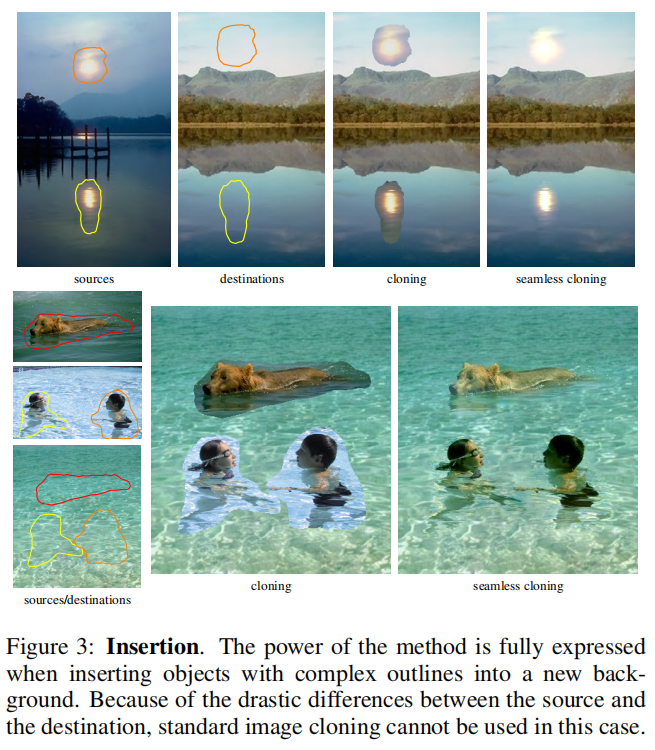
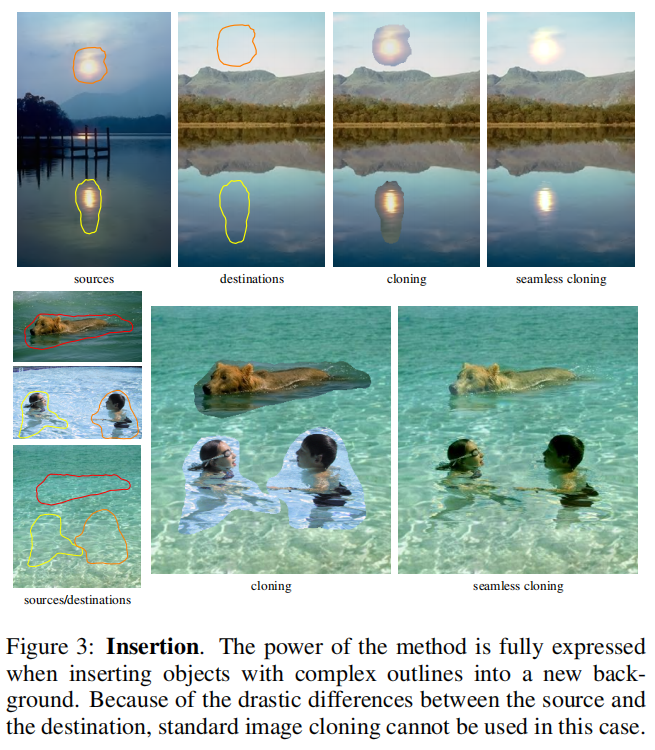
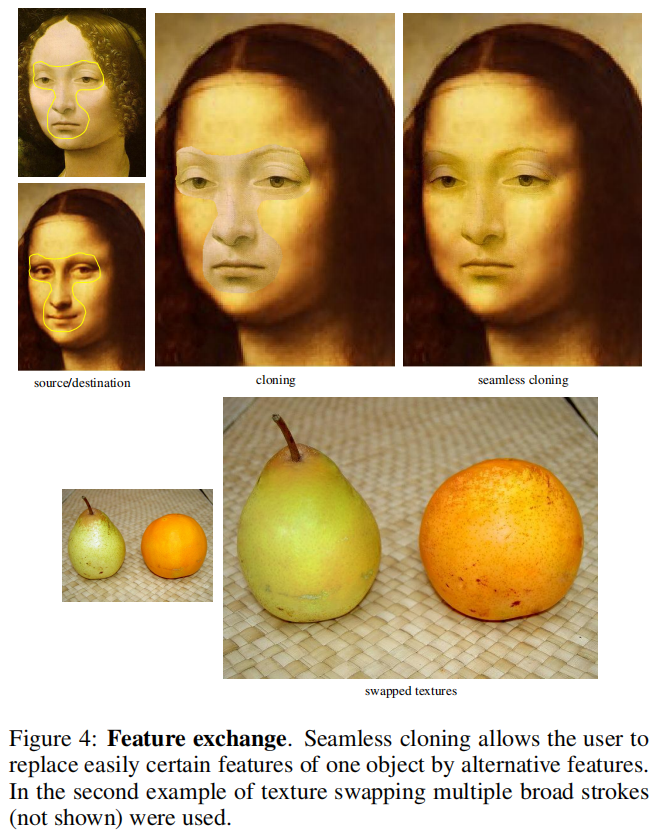
Seamless cloning
�����϶Բ��ɿ�ͼ�����������У�Ϊ���ⷽ�㣬��ֱ�Ӳ����˲����ںϵ����ۣ���ԭ���Ľ�������Ϊһ��ͳһ��ͼ������ܣ������Ϊ���ɲ�ֵ���������ں�Ҳ�����ϲ��ɲ�ֵ��ܵ���ͼ�����������Ӧ�ã����������ֵ����ݶȳ��ļ��㷽ʽ��
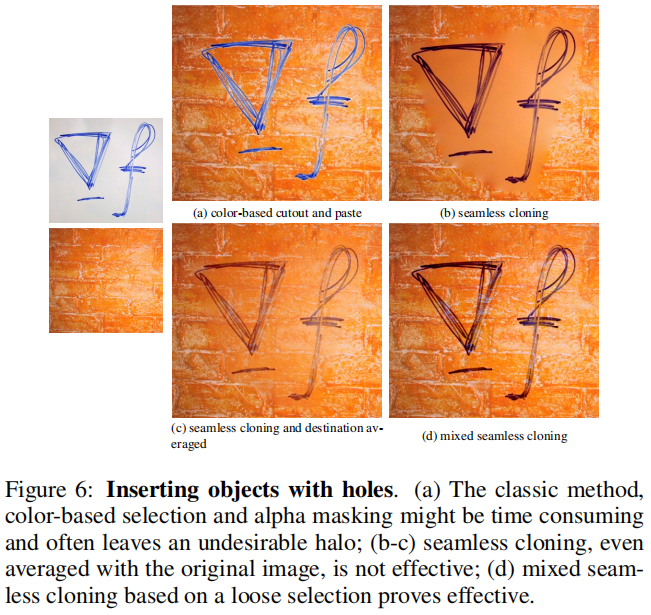
- Importing gradients��ֱ��ѡ��ǰ��������ݶ���Ϊ�����ݶȣ�
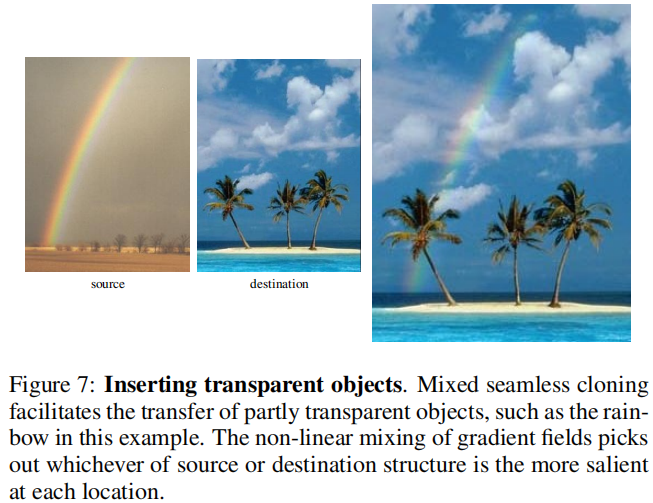
v=?g\mathbf v = \nabla g v=?g - Mixing gradients��������\Omega��������f?��gf^{*}��gf?��g���ݶȷ��������ݶ�������
x�ʦ�,v(x)={?f?(x)if �O?f?(x)�O>�O?g(x)�O?g(x)otherwise. \mathbf{x} \in \Omega, \mathbf{v}(\mathbf{x})=\left\{\begin{array}{ll} \nabla f^{*}(\mathbf{x}) & \text { if }\left|\nabla f^{*}(\mathbf{x})\right|>|\nabla g(\mathbf{x})| \\ \nabla g(\mathbf{x}) & \text { otherwise. } \end{array}\right. x����,v(x)={ ?f?(x)?g(x)? if �O?f?(x)�O>�O?g(x)�O otherwise. ?
���е�ͼ���Dz����ں��ڸ��־����ͼ���������е�Ӧ�á�