完整任务内容
1.按照课件上 gazebo 仿真内容,完成 gazebo 环境设置(包括家具和障碍物)、机器人传感器(camera、kinect、Lidar)安装,用键盘控制机器人的行走,并在 Rviz 中查看各传感器的采集信息。
2. 用 gazebo 仿真器搭建自己的一个三维虚拟环境,可以是一个室内环境(家庭环境、教室、 会议厅等),也可以是一个户外环境(比如运动场、街道、公园等)。
1.创建自己的模型环境
打开gazebo
gazebo
Edit选择building editor,开始创建模型。
创建好后保存在.gazebo/models。
然后再打开gazebo,
gazebo
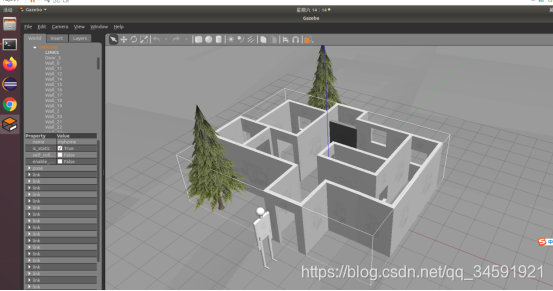
insert当中找到自己刚刚保存的模型。再insert其他自己喜欢的模型,稍加修饰,保存为world文件(我的叫myworld.world)。保存路径:

长这个样子:
2.使用环境
在示例源码中修改一下launch文件即可!
即还是用之前用的view_mbot_gazebo_play_ground.launch文件,改一下wolrd参数文件即可。

3.启动
source catkin_ws/devel/setup.bash
roslaunch mbot_gazebo view_mbot_gazebo_play_ground.launch
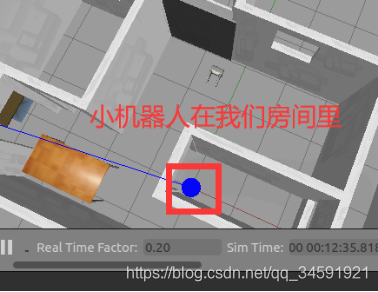
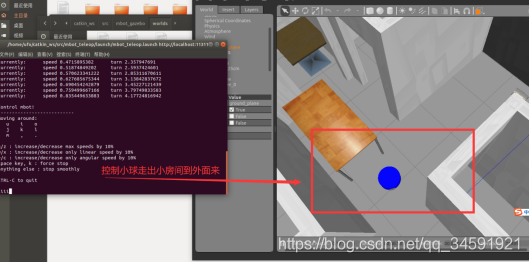
4.使他移动
source catkin_ws/devel/setup.bash
roslaunch mbot_teleop mbot_teleop.launch
5.用相机观测
依然是改相应的launch文件中wolrd的参数
roslaunch mbot_gazebo view_mbot_with_camera_gazebo.launch
rqt_image_view
6.用kinect观测
依然是改相应的launch文件中wolrd的参数
roslaunch mbot_gazebo view_mbot_with_kinect_gazebo.launch
rviz
rviz配置point2和image

7.用lidar观测
依然是改相应的launch文件中wolrd的参数
roslaunch mbot_gazebo view_mbot_with_laser_gazebo.launch
rviz
rviz配置robotmodel和lasercan

参考链接:https://blog.csdn.net/qq_36355662/article/details/80030372