LOAM SLAM֮����ԭ�����
- 1. ����
- 2. �ص�
- 3. �������
- 4. ����
- 5. ��������ȡ
- 6. Ѱ���������ϵ
- 7. �˶�����
- 8. ������̼��㷨����
- 9. ��ͼ
- 10. �ܽ�
- 11. �����
1. ����
�������Ķ�LOAM���ĺ��LOAM SLAM�����⣬�Թ��Լ��Ժ�ο���
2. �ص�
ֻ��Ҫ3d����������ݣ���Ư�ƣ��ͼ�������
SLAM��Ϊ�������֣�10Hz��������̼���1Hz����ͼ
������̼�ʹ�û���������������ڵ���֡����ƥ����
������ͼʹ�û������������У���������������ݺ���ͼƴ�ӡ�
ʹ�õ��������Ͷ�Ӧ���������������ࣺ
- ʹ��
��Ե���Լ���Ե��������Ե���� - ʹ��
ƽ����Լ�ƽ�������ƽ����
��KITTI����̼����кܸ���
3. �������
sweep��ʾһ�����������ݣ�һ֡�������ݣ������scan֮��õ��ĵ������ݣ���Ӧ�����ڵ����������״һ�ߴ���һ��scan��16�����״�һ�λ�õ����ݾ���һ��sweep������16��scan���ݣ�����3ά�������ݣ�ÿ�δ����Ķ���һ��sweep���ݣ������Ž���ά����������ά���𣿽����ڴ����ĵĻ�е�ṹ�����ʹ�ö����⣬һ��һ֡���ݳ�Ϊscan����������Ϊ��ά�״��ԭ�����ﺬ�巢���˱仯�����DZ��ʶ���һ������ɨ����̳�Ϊscan��
k��ʾ�ڼ���sweep
PkP_kPk?��ʾ��k��sweep�ĵ�������
L��ʾ�����״�����ϵ������ǰ��������ϵ��Xk,iLX^L_{k,i}Xk,iL?��ʾPkP_kPk?�е�iii�ڼ����״�����ϵL�µ�����
W��ʾ��ά�������� ������ǰ��������ϵ��Xk,iWX^W_{k,i}Xk,iW?��ʾPkP_kPk?�е�i{\textit{i}}i����������ϵW�µ�����
��Ҫ���������
����������������PkP_kPk?�����㼤���״���sweep֮����˶�������ʷ�켣����Χ����������ͼ��
4. ����
����ʹ�����������״�����������һ���������״
�����״������Ϣ��
�ͺ�ΪUTM-30LX 2ά�����״� 25msec/scan,ÿ�����40��ɨ�衣
��õĵ�������
ˮƽ��Χ��180�㣬�ֱ���Ϊ0.25��
ʹ�õ��ʵ�ִ�ֱɨ�裬���ٶ�Ϊ180��/s����ֱ��ΧΪ180�㣬
һ��������֡����(sweep)����ˮƽ��Χ180�㣬��ֱ��Χ180�㡣��ʱ1s��

�����ļ������ݻ��������������Ϊʲô�أ�
- ����ĵ������ݲ���ͬһʱ���ȡ�ģ���sweep
��ʼʱ�����Aλ�ã���sweep����ʱ�����Bλ�ã���Ϊ����ɨ��ʱ��ϳ��������һ��ƽ�е�ǽ�棬����״���¼����A����Bλ�ò����ľ���Ӧ��һ��������ʵ���м����Aλ�ò����ľ���ʹ���Bλ�õIJ����ľ���һ������ֲ��죬ʧȥ��ԭʼƽ��ǽ������������м���SLAMʱ��ABλ�õIJ�����Ҫ���ǣ�����˵���������ڼ���˶�����Ҫ���ǣ���Ӧ���������ݻᷢ�֣��������ݳ��ֽϴ��ƫ�ơ���������ݴ���ʱ��Ҫ���켤���˶�ģ�����������ƻ��������Ӱ�졣
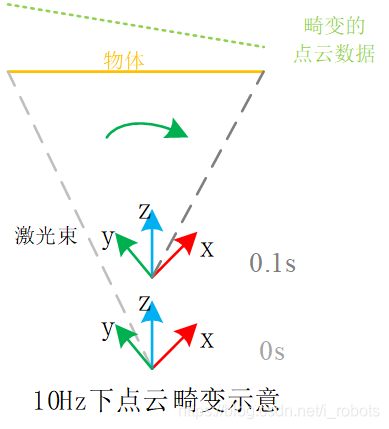
����ͼ��ʾ�����ڻ����˵��˶���������̼�ֱ�ӻ�õ�������ʵ�����ݵ�λ�ô��ڲ��죬�����Ҫ����������ԭʼ�������ݾ���������̼�����֮�����Ч�����Խ��͡�

����LOAM�����̣�����ע�ᣬ������̼ƣ���Ƶ�;��ȣ������⽨ͼ����Ƶ�߾��ȣ������귢����

5. ��������ȡ
�����������Ե����ƽ���
SSS�ǵ�kkk֡���������е�iii��ӦXkiLX^L_{ki}XkiL?������һ�������㼯�ϣ���ʽ��ʾ�ĺ��壺
���ݵ�iii��SSS�е����һ��ʸ���͵�ģ���жϵ�i�����ͣ����ģ������Ϊ��Ե�㣬ģС��Ϊƽ��㡣�OS�O|S|�OS�O��ʾSSS�е��������

����ͼ��ʾ����Ե���ʸ���͵�ģһ�������ʸ������Ϊ������������Ӧƽ����ʸ���͵�ģһ���С��ʸ����Ϊ��������

��ÿ��scanɨ��õ��ĵ����������ȷ�Ϊ�ĸ�����ÿ������������2����Ե�㣬4��ƽ��㡣
��Ҫ�������ɿ�������������a�е�B�㣬����ƽ��ͼ�����ƽ��������b�е�A�㣬ʵ���д���ƽ�����������ڱ��ڵ���ԭ����ܱ���Ϊ��Ե�㣬��˲��������ı�Ե�㣬������֡�����п��������ٴι۲��������������Ҫ�����ų���
������Ⱥ����ij����������������������������

���ѡ��������ʱ��Ҫ����������
- ��������������������
���ֵ��ÿ�����������������Ŀ��һ���ģ���ֹ����������㡣 - ������
��Χ�㲻���ٴα�ѡ��������ÿ��������������������ͱȽ����ˣ���һ����ֹ�����㼯�зֲ��� - ������
��ƽ�м�������ƽ������DZ��ڵ���ƽ���������Ⱥ������Щ���Dz��ɿ��ĵ������ݣ�������������֡���������еõ���������Ϊ�����㡣
��ͼ�����ҵ�����Ե������ɫ����ƽ�������ɫ�������ڼ����״ﴦ���˶��У����ʱ���ڵ��ƻ��䣬δ����У������ʱҲ���ܽ���У����

6. Ѱ���������ϵ
���ڱ�Ե�㣬Ѱ�ұ�Ե��ͱ�Ե������ֱ�ߵĹ�ϵ������ƽ��㣬Ѱ��ƽ����ƽ��Ĺ�ϵ��
PkP_kPk?��ʼ��ʱ���Ϊtkt_ktk?��������ʱ���Ϊtk+1t_{k+1}tk+1?����������У��֮��PkP_kPk?��ͶӰ��tk+1t_{k+1}tk+1?�õ�P��k\bar{P}_kP��k?��
���Ƽ����״��˶�ʱ��ʹ�õ���
��ͶӰ��������(��������У��)P��k\bar{P}_kP��k?���µĵ������ݣ�δ��������У����Pk+1P_{k+1}Pk+1?��

Ek+1{E}_{k+1}Ek+1?��Hk+1H_{k+1}Hk+1?�ֱ��ʾ��Pk+1P_{k+1}Pk+1?��δ��������У�������ҵ��ı�Ե���ƽ��㼯�ϡ���Ӧ�ģ�������Ҫ��P��k\bar{P}_kP��k?���ҵ���Ek+1{E}_{k+1}Ek+1?����Ե���Ӧ�ı�Ե������Hk+1H_{k+1}Hk+1?��ƽ����Ӧ��ƽ����
- �����˵һ�£�Ϊʲô����������£�
û�л����������״��ڶ�ʱ�����ȡ������֡�����Ǻ�������ͬһ�������ģ�����Pk+1P_{k+1}Pk+1?��PkP_{k}Pk?�кܶ�������ֻ���״��ڲ�ͬλ���¹۲��ͬһ��������ǰ���Ѿ�ȥ���˲��ɿ��������㣩����ô����ֻҪ�ҵ�һ���任��ϵTTTʹPk+1P_{k+1}Pk+1?��PkP_{k}Pk?�ж�Ӧ�ĵ��غϣ������TTTʵ���ϱ�ʾ�������״��֡���˶���Ϊ�˼��ټ�����������³���ԣ���ֱ��ʹ�õ�����ƥ�䣬����ʹ�ñ�Ե��Ͷ�Ӧ����������ƽ���Ͷ�Ӧ��������������Ҳ���Եõ��任��ϵTTT��Ȼ�����ڵĵ������������л����ģ����ҽ�������PkP_{k}Pk?Ҳ��ͶӰ����tk+1t_{k+1}tk+1?ʱ�̣���ô���ھ���һ�߽��н�����һ�߽���ƥ����ֱ�����е�Ͷ�Ӧ��������������С�������һ�������Ĺ��̣�����ʱ���任��ϵTTTһֱ�ڷ����仯��TTT�ı任ʹ���е�Ͷ�Ӧ���������������е�Ͷ�Ӧ����������������������Ӧ��������������һֱ������С�ķ���ǰ����
ÿ�ε����������ʱ���ὫEk+1{E}_{k+1}Ek+1?��Hk+1H_{k+1}Hk+1?�е���������ͶӰ��k+1k+1k+1��sweep��ʼtk+1t_{k+1}tk+1?��������Ϊ���ǿ��Բο���ֻ�� ��һ֡ ������ ��ͶӰ��tk+1t_{k+1}tk+1?������P��k\bar{P}_kP��k?����ʹ��E~k+1\widetilde{E} _{k+1}E
k+1?��H~k+1\widetilde{H} _{k+1}H
k+1?��ʾ������������ͶӰ��k+1k+1k+1��sweep��ʼtk+1t_{k+1}tk+1?�ĵ㼯�ϡ�����E~k+1\widetilde{E} _{k+1}E
k+1?��H~k+1\widetilde{H} _{k+1}H
k+1?�е�ÿ���㣬������Ҫ��P��k\bar{P}_kP��k?���ҵ�����ڵ㣨���ʱ�����ǵ�ʱ�������tk+1t_{k+1}tk+1?����˿��Խ���ƥ�䣩��
��ͼ��ʾ�����Ѱ�ұ�Ե�㹹�ɱ�Ե���Լ����Ѱ��ƽ��㹹��ƽ����
��Ե�����Ե�ߣ���a�У�iii��E~k+1\widetilde{E}_{k+1}E
k+1?�е�һ���㣬jjj��P��k\bar{P}_kP��k?����iii����ڵ���lll��jjj��������ɨ������iii����ڵĵ���Ҳ����jjj��lll����ͬһ��scanɨ��õ��ĵ㣨һ��scanɨ��ֻ�ܰ�����Ե���е�һ���㣬�������Ͳ��DZ�Ե���ˣ���������ɨ����Ϊ����ֹ�˶���������±�Ե��������ȡ����ȷ����Ϊ��������⣬ʹ�õļ����ڲ�ͬ��scan��ͬһ��λ�Ƕ�Ӧʱ����IJ���ͦ��ģ�����һ��scan���ڣ������jjj��lll������iii��Ӧ�ı�Ե�ߣ��������Ǿ�ΪP��k\bar{P}_kP��k?�еı�Ե�㡣
��i,j,li,j,li,j,l�ֱ����ڵļ�����iii����E~k+1\widetilde{E}_{k+1}E
k+1?��jjj��lll����P��k\bar{P}_kP��k?�����Ҳ�ͬ��scan���С�
ƽ�����ƽ�棺��ͼb�У�iii��H~k+1\widetilde{H}_{k+1}H
k+1?�е�һ���㣬jjj��P��k\bar{P}_kP��k?����iii����ڵ���Ϊ��ȷ��һ��ƽ�棬������Ҫ��������ͬһֱ���ϵĵ���lll����jjjͬһ��scanɨ������iii�����ڵĵ㣬mmm��jjj��������scanɨ������iii����ڵĵ㣬Ҳ����jjj��mmm����ͬһ��scanɨ��õ��ĵ㣬jjj��lll��ͬһ��scanɨ��ĵ㡣jjj��lll��mmm������iii��Ӧ��ƽ�棬�������Ǿ�ΪP��k\bar{P}_kP��k?�е�ƽ��㡣
��i,j,l,mi,j,l,mi,j,l,m�ֱ����ڵļ�����iii����E~k+1\widetilde{E}_{k+1}E
k+1?��jjj��lll��mmm����P��k\bar{P}_kP��k?����Ӧ��scanǰ��������ˡ�

����ƥ���ԭ�������Թ����Ż����⣺���任��ϵTTTʹ��Ե��ͱ�Ե�߾�����̣�ƽ����ƽ��������
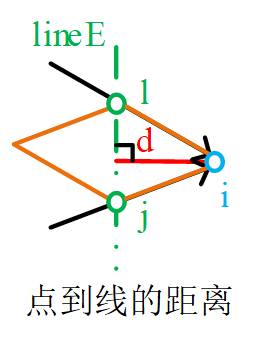
���ڵ����ߵľ�������У�
��˱�ʾ������ɵ�ƽ���ı�����������/�� = �ߡ�����ĸ߾��Ǿ���
��ʽ��������
X~k+1,iL\widetilde{X}^L_{k+1,i}X
k+1,iL?��ʾ������������ͶӰ�ĵ�k+1k+1k+1֡�����еĵ㣬ʱ�����tXk+1,it_{X_{k+1,i}}tXk+1,i??�任����k+1k+1k+1֡���ݵĿ�ʼtk+1t_{k+1}tk+1?��ʹ���������˶�ģ�͡�
X��k,jL\bar{X}^L_{k,j}X��k,jL?��ʾ����У���ĵ�kkk֡���ݣ�������ͶӰ֮�����е��ʱ�����Ϊ��kkk֡���ݵ�ĩβtk+1t_{k+1}tk+1?��
dE=�O(X~k+1,iL?X��k,jL)��(X��k+1,iL?X��k,lL)�O(X��k,jL?X��k,lL)d_E=\frac { |(\widetilde{X}^L_{k+1,i}-\bar{X}^L_{k,j}) \times(\bar{X}^L_{k+1,i}-\bar{X}^L_{k,l})| } { (\bar{X}^L_{k,j}-\bar{X}^L_{k,l}) }dE?=(X��k,jL??X��k,lL?)�O(X k+1,iL??X��k,jL?)��(X��k+1,iL??X��k,lL?)�O?
���Բο������ͼ����
���ڵ��ƽ������У�
��˱�ʾ������ɵ�ƽ���ı������������ٵ�˱�ʾ�������������/��� = �ߡ�����ĸ߾��Ǿ��롣
��ʽ���£�˵һ��ÿ����������ʱ����ɣ�
X~k+1,iL\widetilde{X}^L_{k+1,i}X
k+1,iL?��ʾ������������ͶӰ�ĵ�k+1k+1k+1֡�����еĵ㣬ʱ�����tXk+1,it_{X_{k+1,i}}tXk+1,i??�任����k+1k+1k+1֡���ݵĿ�ʼtk+1t_{k+1}tk+1?��ʹ���������˶�ģ�͡�
X��k,jL\bar{X}^L_{k,j}X��k,jL?��ʾ����У���ĵ�kkk֡���ݣ�������ͶӰ֮�����е��ʱ�����Ϊ��kkk֡���ݵ�ĩβtk+1t_{k+1}tk+1?��
dH=�O(X~k+1,iL?X��k,jL)((X��k,jL?X��k,lL)��(X��k,jL?X��k,mL))�O(X��k,jL?X��k,lL)��(X��k,jL?X��k,mL)d_H=\frac{|(\widetilde{X}^L_{k+1,i}-\bar{X}^L_{k,j}) ((\bar{X}^L_{k,j}-\bar{X}^L_{k,l}) \times{(\bar{X}^L_{k,j}-\bar{X}^L_{k,m})})|} {(\bar{X}^L_{k,j}-\bar{X}^L_{k,l}) \times{(\bar{X}^L_{k,j}-\bar{X}^L_{k,m})}}dH?=(X��k,jL??X��k,lL?)��(X��k,jL??X��k,mL?)�O(X k+1,iL??X��k,jL?)((X��k,jL??X��k,lL?)��(X��k,jL??X��k,mL?))�O?
���Բο������ͼ����

�����£������Ϊ0��Ҳ���DZ�Ե��λ�ڱ�Ե�ߣ�ƽ���λ��ƽ�档�����Dz����ܵġ�ֻ���ҵ�һ����Ϊ0����Сֵ��
7. �˶�����
������������Խ����˶����ƣ�����˶�������ͨ��������֡�����״�������ݹ�����֡�����״�֮����˶�������˶���ʵ��������ǰ�����ᵽ�ı任��ϵTTT����������������֡�������ݣ�ע�����У���������⣬ʱ������ı任��ϵ����ʵ�Ͷ�Ӧ������ȡ��������֡��������ʱ�����λ�˱任��Ҳ������ν���˶��������ۻ����Ϳ����γɴӿ�ʼ����ǰ�ļ����˶������ɼ�����̼ơ�
���輤����������˶������˶�״̬��
����ı�ʾ���������������в�ͬ����ע��
tkt_{k}tk?��ʾ��kkk��sweep�Ŀ�ʼʱ�䡣
Tk,k+1LT^L_{k,k+1}Tk,k+1L?��ʾ�������������[tk,tk+1][t_{k},t_{k+1}][tk?,tk+1?]֮���λ�˱任����λ�˱任����3ά�ռ䣬ӵ��6�����ɶȣ�������ƽ�ƺ���ת��Tk,k+1LT^L_{k,k+1}Tk,k+1L?�Ķ�������
Tk,k+1L=[��x,��y,��z,tx,ty,tz]TT^L_{k,k+1}=[\theta_x,\theta_y,\theta_z,t_x,t_y,t_z]^TTk,k+1L?=[��x?,��y?,��z?,tx?,ty?,tz?]T
����iii����Xk,iX_{k,i}Xk,i?������PkP_{k}Pk?��ʱ���Ϊtat_ata?����Ӧ��λ�˱任ΪTk,aLT^L_{k,a}Tk,aL?��������ͼ����λ�˱任�Ǵ���һ��ת���ģ���һ��ֱ����ȣ�����ʾ�������������[tk,ta][t_{k},t_a][tk?,ta?]֮���λ�˱任��ͨ�����Բ�ֵ��Tk,aLT^L_{k,a}Tk,aL?������Tk,k+1LT^L_{k,k+1}Tk,k+1L?�õ�
Tk,aL=ta?tktk+1?tkTk,k+1LT^L_{k,a}=\frac{t_{a}-t_k}{t_{k+1}-t_k}T^L_{k,k+1}Tk,aL?=tk+1??tk?ta??tk??Tk,k+1L?
���ݼ���������˶�ģ�ͣ���˿��Եõ�
ʱ���Ϊtat_ata?�ĵ�Xk,iX_{k,i}Xk,i? �� ͶӰ����kkk��sweep��ʼ�ĵ�X~k,i\widetilde{X}_{k,i}X
k,i?��ʱ���Ϊtkt_ktk?���任��ϵ�������ǰ��Ķ��������Բ�һ�������Ƕ�һ����ֻ����Ϊ�˷����ʾ��ͶӰ��tkt_ktk?ʱ�̡�
��ô���Եõ���ϵʽ���£�����ĵ�Xk,iX_{k,i}Xk,i?��ΪPkP_{k}Pk?�е������㣬Ҳ���ǽ�һ������EkE_kEk?��HkH_kHk?����Ӧʱ��Ϊtat_ata?������X~k,i\widetilde{X}_{k,i}X
k,i?ΪE~k\widetilde{E}_kE
k?��H~k\widetilde{H}_kH
k?�е������㣬��Ӧʱ��Ϊtkt_ktk?��
Xk,iL=Rk,aLX~k,i+tk,aLX^L_{k,i}=R^L_{k,a}\widetilde{X}_{k,i}+t^L_{k,a}Xk,iL?=Rk,aL?X k,i?+tk,aL?
�����Rk,aLR^L_{k,a}Rk,aL?��tk,aLt^L_{k,a}tk,aL?����ͨ��Tk,aLT^L_{k,a}Tk,aL?�õ����ֱ��ʾ��ת��ʹ��RPYŷ���ǹ��죩��ƽ�ƣ�ֱ�Ӷ�Ӧ����
��Ӧ�ĵ�������ת����ʾͼ����

- �Dz��DZ�����Ĺ�ʽ��ø��ӻ����ˣ������������ǣ�������������ͼ����������ӵ��tkt_{k}tk?ʱ�̵Ļ���У���ĵ�������P��k?1\bar{P}_{k-1}P��k?1?�Լ�δУ���ĵ�������Pk{P}_{k}Pk?��ʲô��δУ���أ����ǵ������ݲ���ͬһ��ʱ�̻�õģ������Ҫ�����˶�ģ��У����ʹ������ģ�͵õ���λ�˱任Ta,kLT^L_{a,k}Ta,kL?��tat_ata?ʱ�̵ĵ�Xk,iLX^L_{k,i}Xk,iL?ͳһת����tkt_ktk?ʱ�̵õ�P~k\widetilde{P}_{k}P k?������ӵ��ͬһ��ʱ����ĵ�������P��k?1\bar{P}_{k-1}P��k?1?��P~k\widetilde{P}_{k}P k?���Ϳ��ԶԵ����߾��롢�����������е����Ż��õ����ŵ�λ�˱任Ta,kLT^L_{a,k}Ta,kL?��
�ղ��Dz���̸����Ta,kLT^L_{a,k}Ta,kL?������Ǹ�����أ�
����Xk,iL=Rk,aLX~k,i+tk,aLX^L_{k,i}=R^L_{k,a}\widetilde{X}_{k,i}+t^L_{k,a}Xk,iL?=Rk,aL?X k,i?+tk,aL?
���Եõ�Ra,kL(Xk,iL?tk,aL)=X~k,iR^L_{a,k}(X^L_{k,i}-t^L_{k,a})=\widetilde{X}_{k,i}Ra,kL?(Xk,iL??tk,aL?)=X k,i?
�����Ra,kLR^L_{a,k}Ra,kL?��tk,aLt^L_{k,a}tk,aL?����ͨ��Ta,kLT^L_{a,k}Ta,kL?�õ���Ta,kLT^L_{a,k}Ta,kL?��Tk,aLT^L_{k,a}Tk,aL?��һ�������㡣ƽ��������ֱ�ӷ���������ת��Ҫ�ǶȺͱ任˳��ͬʱȡ����
��˿��Խ�֮ǰ�ı�Ե��ͱ�Ե�߾�����㣬ƽ����ƽ���������Ϊ����Ĺ�ʽ
fE(Xk,iL,Tk,k+1L)=dE��Xk,iL��Ek+1f_E(X^L_{k,i},T^L_{k,k+1})=d_E��X^L_{k,i}\in{E_{k+1}}fE?(Xk,iL?,Tk,k+1L?)=dE?��Xk,iL?��Ek+1?
fH(Xk,iL,Tk,k+1L)=dH,Xk,iL��Hk+1f_H(X^L_{k,i},T^L_{k,k+1})=d_H,X^L_{k,i}\in{H_{k+1}}fH?(Xk,iL?,Tk,k+1L?)=dH?,Xk,iL?��Hk+1?
�����е�������Ͷ�Ӧ��������빫ʽ��ϣ����Եõ�һ��
f(Tk,k+1L)=[fE(Xk,a1L,Tk,a1L)fE(Xk,a2L,Tk,a2L)......fH(Xk,a1L,Tk,a1L)fH(Xk,a2L,Tk,a2L)]=[dE,a1dE,a2......dH,a1dH,a2]=df(T^L_{k,k+1})=\begin{bmatrix}f_E(X^L_{k,a_1},T^L_{k,a_1}) \\f_E(X^L_{k,a_2},T^L_{k,a_2}) \\...... \\f_H(X^L_{k,a_1},T^L_{k,a_1}) \\f_H(X^L_{k,a_2},T^L_{k,a_2}) \end{bmatrix}=\begin{bmatrix}d_{E,a1} \\d_{E,a2} \\...... \\d_{H,a1} \\d_{H,a2} \end{bmatrix}={d}f(Tk,k+1L?)=???????fE?(Xk,a1?L?,Tk,a1?L?)fE?(Xk,a2?L?,Tk,a2?L?)......fH?(Xk,a1?L?,Tk,a1?L?)fH?(Xk,a2?L?,Tk,a2?L?)????????=???????dE,a1?dE,a2?......dH,a1?dH,a2?????????=d
����һ���������Ż����⣬����ͨ��GN��⣬ֱ��d��С����
J=?f/?Tk,k+1LJ=\partial{f}/\partial{T^L_{k,k+1}}J=?f/?Tk,k+1L?
JTJ��Tk,k+1L=?JTdJ^TJ\Delta{T^L_{k,k+1}}=-J^TdJTJ��Tk,k+1L?=?JTd
8. ������̼��㷨����
�����϶�������֮ǰ���ܵ����̣���˵һ�䣬���ڵ�kkk֡����PkP_{k}Pk?����ʹ�ù��Ƶ�λ�˱任ͶӰ��tk+1t_{k+1}tk+1?ʱ�̵õ�P��k\bar{P}_{k}P��k?������һ�ι���֡���˶�ʹ�á�

9. ��ͼ
�ۼ�һ��֡��Ŀ�ĵ������ݲŻ���н�ͼ��Ƶ�ʽϵͣ����Ǿ��Ⱥܸߡ�
Ŀ�ģ��������������뵽�����ͼ�У���ȷ���Ƽ�������������ϵ��λ�ˡ�
����̼���ȣ����ﹹ����Ե�ߣ�ƽ��ʱʹ�õĵ���������ӣ������Ҫ�������������õ�����������������
- ��Ϊ��̼�ʹ�õĵ������٣���˶����ߣ�ʹ��������Ϳ���ȷ����������������Ƕ��ڽ�ͼ����ʹ�õĵ����϶࣬����ֱ�ӵõ����������������������ν��������ʹ����Э�������
������ѧ֪ʶ�����Եõ�һ���������ά������ֲ�����Щ����ά�����γɵ�Э��������Ǵ���һ����ϵ�ġ���Ӧ�Ļ�����
�����ڽ���һ�����ϵĵ㣬���ǵ�Э�������������ֵ������Сһ������1>>��2>��3\lambda_1>>\lambda_2>\lambda_3��1?>>��2?>��3?����������1\lambda_1��1?��Ӧ����������������Щ�����ڵ���������
�����ڽ���ƽ��ĵ㣬���ǵ�Э�������������ֵ��������һС����1>��2>>��3\lambda_1>\lambda_2>>\lambda_3��1?>��2?>>��3?����������3\lambda_3��3?��Ӧ����������������Щ������ƽ�����������
Ȼ����Խ���P��k\bar{P}_{k}P��k?�е�͵�ͼ�е��γ��ߣ�P��k\bar{P}_{k}P��k?�е�͵�ͼ�е��γ���ľ����ϵ��ʹ�÷������Ż�ͬ�����Խ�һ���õ�����ȷ��λ�˱任��
P��k\bar{P}_{k}P��k?�ĵ㶼����ͬһ��ʱ������Ѿ�����У������ʱ����Ҫ��ʹ�������˶�ģ�ͣ����ǵõ���ȷ��λ��֮��ὫP��k\bar{P}_{k}P��k?��һ��ͨ��TkWT^{W}_{k}TkW?����ʾ��kkk֡�������ݴӾֲ�����ϵLLL����������ϵWWW�ı任��ϵ��ת������ͼ�У�����ʹ�������˲����Ե������ݽ����²�����
λ�˵������������ʾ����ɫ��ʾ��ͼ�㷨�õ���λ�˱任TkWT^W_kTkW?����ɫ��ʾͨ����̼��㷨����õ����Ե�λ�˱任Tk+1LT^L_{k+1}Tk+1L?��

10. �ܽ�
LOAM����������

����ע�� :��������ģ�ͣ�ȥ�����ɿ��㣬��ȡ����������
��̼� :֡��������������̼���Ϣ��
��ͼ :�ֲ������ںϵ�ȫ����ͼ��������ȷλ�ˡ�
���귢�� :����������Ϣ������ʾʹ�á�ÿ���ڵ����ͬ��Ҳ�ڷ�������ת����
LOAM���ŵ㣺
����̼ƺͽ�ͼ�ָ�����һ����Ƶ�;�(����ÿ��֡����)��һ����Ƶ�߾�(�ۻ�һ������)
��������Ǵ��нṹ����������������Ϊ��������
��ʵʱ��ͼ�Ŀ�Դ3D Lidar SLAM
LOAM��ȱ�㣺
�������������ɽ�һ�����ƣ��˶����˵�����
�ػ����
���������˶�ģ��
11. �����
Zhang J , Singh S . Low-drift and real-time lidar odometry and mapping[J]. Autonomous Robots, 2017, 41(2):401-416.
Zhang J , Singh S . LOAM: Lidar Odometry and Mapping in Real-time[C]// Robotics: Science and Systems Conference. 2014.