本文解析论文Autonomous Parking using Optimization-Based Collision Avoidance。文章来自uc berkley,这个方案也是非常主流的混合A*泊车方案中的一种,百度也借鉴了这个方案来设计自己的在U型弯和停车场泊车中的功能。文中的方案也是已经开源到了作者GitHub,但这个是julia写的,感觉只有我数学系的老师金炳义才会用Julia,我港科数学系不是盖的好吧, 给数学系丢脸了。Julia这个我是真的没接触过,好在可以直接去读apollo的c++源码如果你感兴趣的话。文章的解析只是个大概,给出了整体思路,对于细节的把握要去看原文,以及作者在文章中提到的自己的另一篇数学推导的证明。
文章的大概思路在于对混合A*计算出来的粗路径做了后处理,进行了基于优化的平滑,并且这个这个过程是有阶梯的(hierachical).所以作者推出了升级版的H-OBCA.这个方案的优势在于:第一,粗路径不一定很合理,基本都是sub optimal的,有时候还要多走很多路(在最后的simulation里面有详细对比)。第二,用基于优化的方案也是有风险的,这个优化问题是个非线性优化问题,解这类问题对初始点的选择很敏感,好在粗路径直接解决了这个问题,我们可以选择粗路径进行解非线性优化问题的热启动,于是我们既能够保证一定能解出来这个非线性优化问题,又能保证路径要远比粗路径合理的多。
首先我们要将问题建模(数学化)。

E表示的是车辆所占据的体积,R和t表示车辆在全局坐标系下发生的转动和平移。

障碍物由O表示,不发生碰撞就意味着E和O不存在交集:

如果我们定义signed distance:

通过一系列证明,这将被等价为:
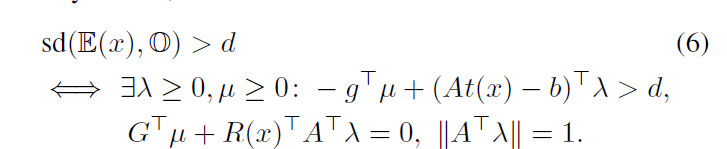
相关的详细推导在作者的另一篇论文中有写。这里不多说了。
接下来定义代价函数:

tao是运行时间,然后我们还要惩罚input u, 以及 delta_u. 其中u是整个离散空间中的全部u的累加。delta_u通过查分计算获得。另外这个tao也是优化变量,因为我们不把他定下来,还可以惩罚时间,我们希望走完这些路尽量快。离散状态使用龙格库塔进行离散推算。最后就写出了带约束的非线性优化问题如下:

其中约束包括了起始点和终点两个等式约束。龙格库塔状态推算的等式约束。状态x和输入u的不等式约束,碰撞检测的不等式和等式约束。
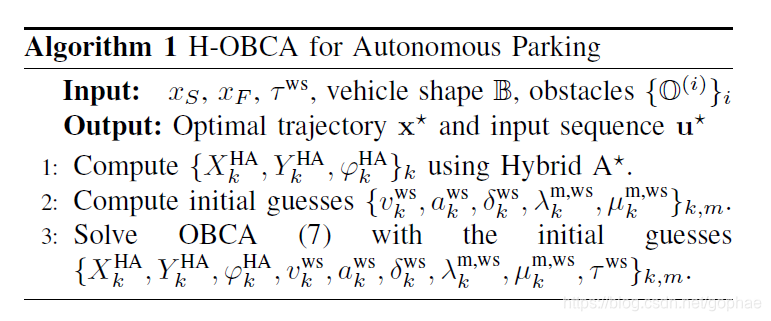
接下来就是规划泊车曲线的三步骤,也是H-OBCA的核心:
1,混合A设计出粗路径,对于混合A的优化直接参考Hybrid A*论文解析(2)
2,每隔一段帧数做一次全局RS曲线搜索,看看能不能获得当前的不发生碰撞的到达终点的RS曲线。
3,使用粗路径作为OBCA方案的热启动,解优化问题获得优化后的平滑曲线。
接下来的仿真对比了这几个方案:
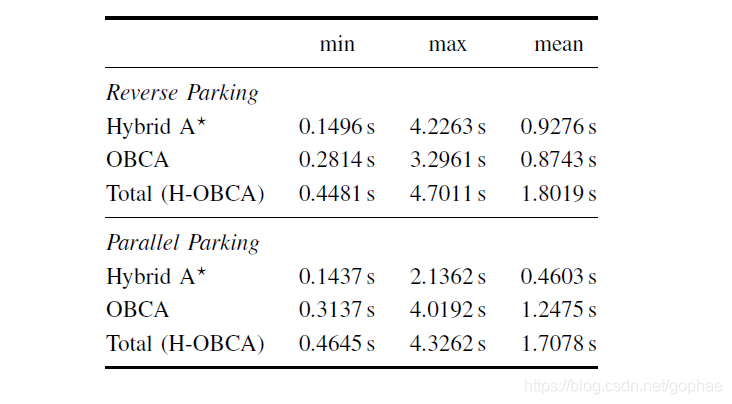
单纯的OBCA和混合A*都不及两者结合好使。
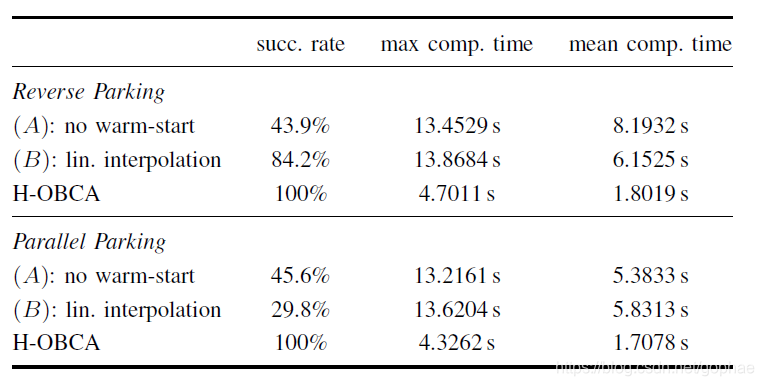
另外还特别分析了热启动对解非线性优化问题的重要性:无论是成功率还是时间,使用热启动都要优越很多:
最后提到了trajectory tracking的方案,横向tracking用了LQR,纵向用了纯P。显示误差还是很小的:
