Routing模块之A*搜索算法
Routing模块的结果是Planning模块生成参考线的基础,也就是通常所说的全局路径规划,Routing模块中除了对地图的抽象处理为可供搜索的topo地图,以及通过KDtree生成黑名单地图外核心算法是通过A* 算法生成全局路径,本文这里主要介绍Routing模块中如何同过A*算法在topo地图中搜索全局通路——全局路径。
1.逻辑框架
Routing模块的功能是从地图中搜索一条从起点–途经点–终点的全局路径,要完成这个功能,需要解决几个问题:1) 地图信息较多,看起来是连续的,如何进行抽象为可搜索的离散地图; 2) A*算法在抽象的地图中是如何搜索的; 3) 搜索的结果是如何使用的;
这里我们首先了解一下routing模块大概的逻辑:
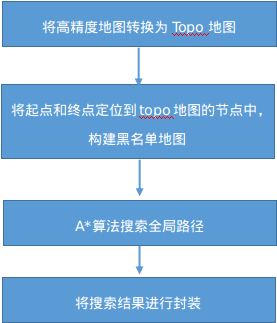
通过上图可知routing实际上先将高精度地图转换为topo地图,topo地图是由一系列的节点和边组成,在生成节点和边的同时会对每个节点和边赋予一定的cost,通常cost与车道的长度、转弯等属性有关。然后通过A*算法对topo图进行搜索,最后对搜索的结果进行封装。
2.Topo地图
在高精度地图中采集的map信息包含了road,信号灯,车道线,物体,信号标识等很多信息,在路径搜索的过程中不能直接使用,而且主要关注的是lane及lane之间的关系,因此,routing模块主要是先将高精度地图中采集的base_map地图信息通过topo_creator程序创建节点和边进而转化为Topo地图,其结果如下,在map模块中定义的参数有很多,在使用过程中需要用到以下参数,然后通过A算法来搜索一条可行的路径:
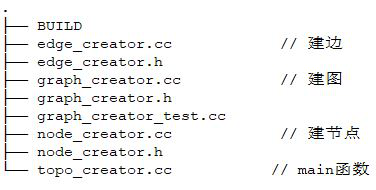
在"routing/topo_creator"建图的代码中主要包括,构建节点,构建边,构建图,其文件结构如下图所示:
对于topo图中的节点和图的详细描述是在routing/graph目录下,其主要的信息如下图 Topo地图的详细结构:

在构建topo图之后通过A算法搜寻路径,A*算法是基于图搜索的一种方式,该模块的输入为构建的图以及子图、起始点和目标点,输出为路由导航信息,对于Topo地图构建的信息可以这样理解,对于下图的道路信息将其抽象为下图的节点和边的信息:

 从图中可以了解到一个road,包含了多个车道信息,每个车道是一个搜索的节点,该节点也是有一定长度的,前后车道之间通过predecessor_id和successor_id进行连接,左右车道之间是通过车道线的类型进行连接的。
从图中可以了解到一个road,包含了多个车道信息,每个车道是一个搜索的节点,该节点也是有一定长度的,前后车道之间通过predecessor_id和successor_id进行连接,左右车道之间是通过车道线的类型进行连接的。
3.A*算法的流程
1)把起始格添加到开启列表(Open List)。
2)重复如下工作:a)寻找开启列表中估量代价F值最低的格子,称之为当前格;b)把它切换到关闭列表中(Closed List);c)对相邻的八个格中的每一个进行如下操作:i.如果它不可通过或者已经在关闭列表中,略过它;反之如下;ii.如果它不在开启列表中,把它添加进去。把当前格作为这一格的父节点。记录这一格的F,G和H值;iii.如果它已经在开启列表中,用G值作为参考检查新的路径是否更好。更低的G值意味着更好的路径。如果是这 样,就把这一格的父节点改成当前格,并且重新计算这一格的G和F值,并在改变后重新按照F值对开启列表排序。d)当目标格被添加进了关闭列表中,这时候路径被找到;或者没有找到目标格,开启列表已经空了,这时候路径不存在。
3)从目标格开始,沿着每一格的父节点移动直到回到起始格,保存路径。
其过程如下图过程解释:

目标:给定一个topo地图,绿色为起点位置,红色为目标位置,A*算法的目的是搜索一条从起始位置到目标位置的路径点序列。
步骤:1将起始当前节点为起始点,将起始点的邻接点加入到open_list中,然后计算其邻接点的cost f值,然后将最小的f值选出来,并把最小的节点从open_list中移除,然后加入到close_list中,并把它的父节点设置为起始节点;
步骤2:将上次的节点设置为当前节点,如果当前节点的邻接点不在open_list中,那么将其加入到其中,进行计算cost f,再次找到代价值最小的点,并把最小的节点从open_list中移除,然后加入到close_list中,并把它的父节点设置为起始节点;
步骤3,依此进行,直到到达目标点,然后根据父节点来依次回溯路径到起始点,或者待计算的open_list集合中都计算完了,还没有到目标点,表示路径搜索失败。
4.A*算法在routing中的应用
Apollo代码中的A*算法的实现过程主要是在a_star_strategy.cc中的search()方法:
代价函数为F=h+g ,其中g表示当前节点到起始节点的代价,主要是通过计算节点以及连接的边的代价值,h为通过曼哈顿距离表示的启发式函数:
double distance = fabs(src_point.x() - dest_point.x()) + fabs(src_point.y() - dest_point.y());
其代码解释如下:
/参数分别为所有图节点,部分图节点,起始节点,目标节点,结果集
bool AStarStrategy::Search(const TopoGraph* graph,const SubTopoGraph* sub_graph,const TopoNode* src_node, const TopoNode* dest_node,std::vector<NodeWithRange>* const result_nodes) {//清楚所有的参数Clear();//记录日志信息AINFO << "Start A* search algorithm.";//std::priority_queue是一种容器适配器,这里再最初重载了<操作符,所以优先输出最小的//作为已经寻路过的节点的代价值std::priority_queue<SearchNode> open_set_detail;//把源节点node传入struct中,作为源SearchNodeSearchNode src_search_node(src_node);//计算源节点的代价值f,启发式距离采用曼哈顿距离src_search_node.f = HeuristicCost(src_node, dest_node);// 源SearchNode 传入push进寻路节点集的优先队列中open_set_detail.push(src_search_node);// 源节点也传入open集中open_set_.insert(src_node);// g函数评分,key-value,计算源节点到自身的移动代价值g_score_[src_node] = 0.0;// 设置源节点进入时的S值,key-valueenter_s_[src_node] = src_node->StartS();// 定义SearchNode变量SearchNode current_node;//定义next边集std::unordered_set<const TopoEdge*> next_edge_set;//定义sub边集std::unordered_set<const TopoEdge*> sub_edge_set;//当open集合不为空时,不断循环检查while (!open_set_detail.empty()) {// 此时节点赋值为open优先级中栈顶的元素,权重用f来比较current_node = open_set_detail.top();// 保存当前SearchNode的起始节点const auto* from_node = current_node.topo_node;// 若起始结点已抵达最终的目标结点,则反向回溯输出完整的路由,返回。if (current_node.topo_node == dest_node) {if (!Reconstruct(came_from_, from_node, result_nodes)) {// 重构该路径是否可行AERROR << "Failed to reconstruct route.";// 不可行说明中间错误return false;}return true;// 否则返回已经正确找到节点}open_set_.erase(from_node);// open集node节点删除open_set_detail.pop();// open集优先队列中将SearchNode节点删除// 若起始结点from_node在CLOSED集中的计数不为0,表明之前已被检查过,直接跳过if (closed_set_.count(from_node) != 0) {// if showed before, just skip...continue;}// 将起始结点加入close集中closed_set_.emplace(from_node);// if residual_s is less than FLAGS_min_length_for_lane_change, only move// forward// 获取起始结点from_node的所有相邻边// 若起始结点from_node到终点的剩余距离s比FLAGS_min_length_for_lane_change要短,// 则不考虑变换车道,即只考虑前方结点而不考虑左右结点。反之,若s比// FLAGS_min_length_for_lane_change要长,则考虑前方及左右结点。const auto& neighbor_edges =(GetResidualS(from_node) > FLAGS_min_length_for_lane_change &&change_lane_enabled_)? from_node->OutToAllEdge(): from_node->OutToSucEdge();// 当前测试的移动代价g评分,初始化指定0double tentative_g_score = 0.0;// 从相邻边neighbor_edges中获取其内部包含的边,将所有相邻边全部加入集合:next_edge_setnext_edge_set.clear();for (const auto* edge : neighbor_edges) {// 对于所有的临接边sub_edge_set.clear();// 子临接边清空sub_graph->GetSubInEdgesIntoSubGraph(edge, &sub_edge_set);// sub_edge_set赋值为edgenext_edge_set.insert(sub_edge_set.begin(), sub_edge_set.end());// 把sub_edge_set汇入next_edge_set}// 所有相邻边的目标结点就是我们需要逐一测试的相邻结点,对相结点点逐一测试,寻找// 总代价f = g + h最小的结点,该结点就是起始结点所需的相邻目标结点。for (const auto* edge : next_edge_set) {// 循环next_edge_setconst auto* to_node = edge->ToNode();// 相邻结点to_node在CLOSED集中,表明之前已被检查过,直接忽略。if (closed_set_.count(to_node) == 1) {continue;}// 若当前边到相邻结点to_node的距离小于FLAGS_min_length_for_lane_change,表明不能// 通过变换车道的方式从当前边切换到相邻结点to_node,直接忽略。if (GetResidualS(edge, to_node) < FLAGS_min_length_for_lane_change) { // 如果边到到达节点node的距离小于限定值,再次循环continue;}// 更新当前结点的移动代价值gtentative_g_score =g_score_[current_node.topo_node] + GetCostToNeighbor(edge);// 如果边类型不是前向,而是左向或右向,表示变换车道的情形,则更改移动代价值g// 的计算方式。if (edge->Type() != TopoEdgeType::TET_FORWARD) {tentative_g_score -=(edge->FromNode()->Cost() + edge->ToNode()->Cost()) / 2;}// 若相邻结点to_node在OPEN集且当前总代价f大于源结点到相邻结点to_node的移动代价g,表明现有情形下// 从当前结点到相邻结点to_node的路径不是最优,直接忽略。// 因为相邻结点to_node在OPEN集中,后续还会对该结点进行考察。if (open_set_.count(to_node) != 0 &&tentative_g_score >= g_score_[to_node]) {continue;}// if to_node is reached by forward, reset enter_s to start_s// 如果是以向前(而非向左或向右)的方式抵达相邻结点to_node,则将to_node的进入距离更新为// to_node的起始距离。if (edge->Type() == TopoEdgeType::TET_FORWARD) {enter_s_[to_node] = to_node->StartS();} else {// else, add enter_s with FLAGS_min_length_for_lane_change// 若是以向左或向右方式抵达相邻结点to_node,则将to_node的进入距离更新为// 当前结点from_node的进入距离加上最小换道长度,并乘以相邻结点to_node长度// 与当前结点from_node长度的比值(这么做的目的是为了归一化,以便最终的代价量纲一致)。double to_node_enter_s =(enter_s_[from_node] + FLAGS_min_length_for_lane_change) /from_node->Length() * to_node->Length();// enter s could be larger than end_s but should be less than lengthto_node_enter_s = std::min(to_node_enter_s, to_node->Length());// if enter_s is larger than end_s and to_node is dest_nodeif (to_node_enter_s > to_node->EndS() && to_node == dest_node) { // 如果满足enter_s比end_s大而且下一个节点是终点,就再次循环continue;}enter_s_[to_node] = to_node_enter_s;}// 更新从源点移动到结点to_node的移动代价(因为找到了一条代价更小的路径,必须更新它)g_score_[to_node] = tentative_g_score;// to_node的g评分重新赋值// 将相邻结点to_node设置为下一个待考察结点SearchNode next_node(to_node);next_node.f = tentative_g_score + HeuristicCost(to_node, dest_node);// next_node的f值为g评分加上启发式距离(曼哈顿)// 当下一个待考察结点next_node加入到OPEN优先级队列open_set_detail.push(next_node);// 将to_node的父结点设置为from_nodecame_from_[to_node] = from_node;// 若相邻结点不在OPEN集中,则将其加入OPEN集,以便后续考察if (open_set_.count(to_node) == 0) {// 如果开集中发现to_node没有出现过,就添加该节点open_set_.insert(to_node);}}}// 整个循环结束后仍未正确返回,表明搜索失败AERROR << "Failed to find goal lane with id: " << dest_node->LaneId();return false;
}