GC标记-清除算法(Mark Sweep GC)
GC算法是对堆空间进行的内存管理,一般堆空间会按内存分配成大小相等的块,并用链表串连起来,比如free_list表示可用空间。
标记清除算法主要有两部分即标记和清除,实现垃圾回收,但垃圾回收之外,还有对应的内存分配,以及垃圾回收后的碎片整理等。
gc(){mark()sweep()
}
标记阶段:mark()函数是会对根对象进行遍历,实现活动的对象的标记,即标记说话费的时间与活动对象的总数成正比;mark时时,对象的搜索主要有dfs和bfs,但dfs所用的内存空间较少一半用dfs。
什么样的对象是活动的?
根对象下所有包含的对象,即整个结构下都有记录,这样的对象时活动的;对于没有记录的对象,即对于程序而言是不会再用到的,这样的对象就是可回收的垃圾。
所以,对于有gc的语言,我们不需要进行动态空间的回收处理,当我们不需要时,即没有记录了,gc算法会自动处理。
清除阶段:sweep()函数,遍历所有的对,回收为标记的对象(垃圾),取消活动对象的标记,为下次mark即gc刷新;清除所花费的时间和堆的大小成正比。

要注意的是
gc是在程序运行中的一段时间进行的,所以垃圾回收会暂停一会程序,如何减少这个暂停时间,或者降低暂停时间对程序的影响,也是gc算法的一个评价指标。
合并:该操作是在清除阶段进行的,因为清除,是遍历堆进行的,空闲链表按地址顺序进行的,所以当回收的对象空间与空闲链表的尾部相连,则可以合并,为后续的分配提供较大的块。
分配:是对回收回来的空闲链表的利用,这根我们操作系统中学习的动态内存的分配方式相似,主要的分配算法有:最优(Best-fit),最差(Worst-fit),最先分配(First-fit);各种分配算法,主要的评价标注,就是其带来的内外碎片问题。最优即是,在空闲链表上找到满足分配要求的最小块;最差即找出空闲聊表的最大分块;最先是在空闲链表上,找到第一个满足的块。单纯考虑分配时间时,选择最先分配。
几种分配算法的优缺点
最差分配算法,可能将造成无大块的情况;最优分配,是选择最佳块后,会分割出许多较小的块,这些是很难再利用到的;一般首次分配,通常表现较好。
参考:常见内存分配算法:首次适应算法(FirstFit)循环首次适应算法(NextFit)最佳适应算法(BestFit)最坏适应算法(WorstFit)
以上,是gc标记清除算法的大体过程,是有很多问题的
优点:标记-清除算法实现简单,甚至可以和其他GC算法相结合;与保守式GC算法兼容(即,不会移动对象)
缺点:碎片化,该算法在使用过程中,会逐渐产生被细化的分块,改进BiBOP算法的目的就是解决碎片化;分配速度,该算法中的分块不是连续的,因此每次分配都要遍历空闲链表,改进多个空链链表和BiBOP算法的目的就是提高分配速度;与写实复制技术不兼容,主要原因是该算法会不断的标记对象(即,写内存),这样如果在写实复制系统下,就会不断的复制共享内存到私有空间,与写时复制的读多写少的场景恰好相反。后边的位图标记算法可以解决该问题。
几个改进
多个空闲链表:改进空闲表
主要是修改了free_list的管理方式,原来是直接将空闲的块串连起来,现在分为2,3,4,等的块大小即有多个空闲链表,当需要时去对应的链表中找到空闲块分配即可。这里有个问题就是分成多少个链表,以每个链表中的块多大,程序中一半较大的块使用很少,所以没必要太大,另外可考虑内存动态分区中的,多链表分配的方式,即按2的指数分配。

BiBOP: 改进内存管理,包括空闲表
Big Bag of Pages,其思想是将大小相近的对象整理成固定大小的块进行管理。把堆分成固定大小的块,让每个块只能配置同样大小的对象。这样管理可提高mutator速度,因为这里的块不会出现大小不均的块,但BiBOP并不能完全消除碎片,比如固定大小的多个块,但程序并没有那么多大小的对象,所以反而会降低堆的使用效率。
如全部用于2个字的块中,只用2个活动对象,这是就不是有效利用堆了。
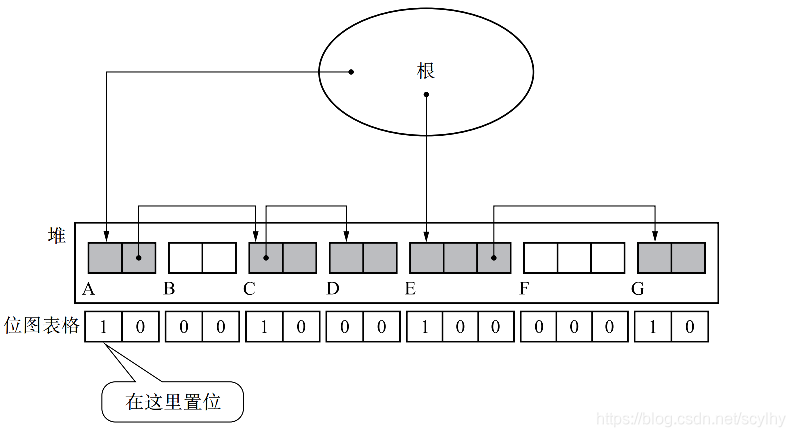
位图标记法(bitmap marking):改进标记操作
使用位图表,每个bit表示对中的一个字,这样遍历所有对象时,标记操作在位图表中。
其优点是与写时复制技术兼容,因为bitmap表很小,所以也就不怕多次复制了;清除操作更高效,将未标记的对象所占空间回收到空闲表上,另直接将bitmap置0,清除阶段不会像之前遍历整个堆,现在是遍历bitmap即可。
需要注意的是多个堆下,对象地址不连续,无法单纯的用位运算求出标志位的位置。
bitmap不是直接用来分配内存的
bitmap只是用表标记某个对象是否是多动的,即1,连续对象之间的0有用吗?没用;
其清除操作仍然是要遍历对象的链表的,并回收其中为标记的对象空间,到空闲链表上;
其分配操作是在空闲链表上进行的,这里的bitmap只是标记管理,与对象内存的分配其实无关。
另,对象空间是有元数据的,会将对象串连起来,方便回收操作。
延迟清除法:改进清除操作
缩减因清除操作而导致的mutator最大暂停时间的方法。在标记操作后,不会一并进行清除操作,如其字面意思,会延迟清除,清除动作发生在为对象分配块时。
new_obj(size){chunk=lazy_sweep(size)//在空闲链表中找到满足size要求的块if(chunk!=NUll)return chunkchunk=lazy_sweep(size)//未找到满足的块,则要进行清理,再次找块if(chunk!=NUll)return chunkallocation_fail()
}
lazy_sweep(size){while($sweepling<$heap_end)if ($sweeping.mark==True)$sweeping.mark=Falseelse if($sweeping.size>=size)chunk=$sweeping //从空闲链表中找到满足的$sweeping+=$sweeping.sizereturn chunk //在垃圾中找到满足的,即回收阶段$sweeping+=$sweeping.size$sweeping=$heap_startreturn NULL
}
这里的$sweeping是全局变量,所以第一在找块时,会清理垃圾,但却是在空闲链表中找;第二次因为第一位找到,第一次完整的清理了垃圾,第二次则是在垃圾中找满足的
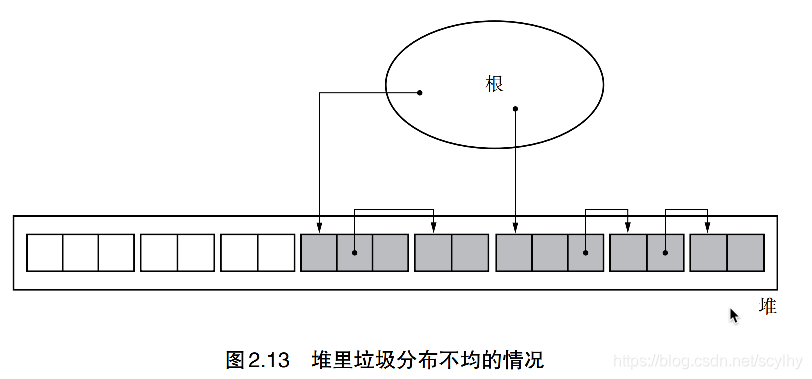
但,延时清除算法不是均衡的,当垃圾变成了垃圾堆,活动对象编程了活动对象堆,在清除垃圾堆较多的部分时,能马上多的分块,所以可以减少mutator的暂停时间,但清除活动进入到活动对象周围,就无法获得分块了,这时就会增加暂停时间。
以上内容为读书笔记,资料《垃圾回收的算法与实现》。