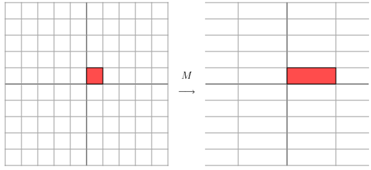
如果说一个向量v是方阵A的特征向量,将一定可以表示成下面的形式:

当矩阵是高维的情况下,那么这个矩阵就是高维空间下的一个线性变换,这个线性变化可能没法通过图片来表示,但是可以想象,这个变换也同样有很多的变换方向,我们通过特征值分解得到的前N个特征向量,那么就对应了这个矩阵最主要的N个变化方向。我们利用这前N个变化方向,就可以近似这个矩阵(变换)。也就是之前说的:提取这个矩阵最重要的特征。总结一下,特征值分解可以得到特征值与特征向量,特征值表示的是这个特征到底有多重要,而特征向量表示这个特征是什么,可以将每一个特征向量理解为一个线性的子空间,我们可以利用这些线性的子空间干很多的事情。不过,特征值分解也有很多的局限,比如说变换的矩阵必须是方阵。
特征值分解――EVD
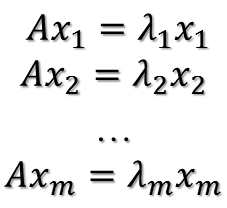
在讨论SVD之前先讨论矩阵的特征值分解(EVD),在这里,选择一种特殊的矩阵――对称阵(酉空间中叫hermite矩阵即厄米阵)。对称阵有一个很优美的性质:它总能相似对角化,对称阵不同特征值对应的特征向量两两正交。一个矩阵能相似对角化即说明其特征子空间即为其列空间,若不能对角化则其特征子空间为列空间的子空间。现在假设存在mxm的满秩对称矩阵A,它有m个不同的特征值,设特征值为

对应的单位特征向量为

则有
进而
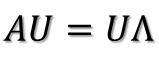
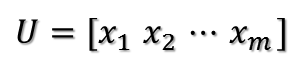
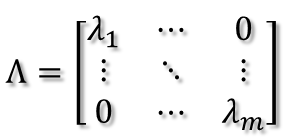
所以可得到A的特征值分解(由于对称阵特征向量两两正交,所以U为正交阵,正交阵的逆矩阵等于其转置)

这里假设A有m个不同的特征值,实际上,只要A是对称阵其均有如上分解。
矩阵A分解了,相应的,其对应的映射也分解为三个映射。现在假设有x向量,用A将其变换到A的列空间中,那么首先由U'先对x做变换:
U是正交阵U'也是正交阵,所以U'对x的变换是正交变换,它将x用新的坐标系来表示,这个坐标系就是A的所有正交的特征向量构成的坐标系。比如将x用A的所有特征向量表示为:

则通过第一个变换就可以把x表示为[a1 a2 ... am]':
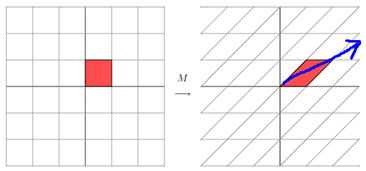
紧接着,在新的坐标系表示下,由中间那个对角矩阵对新的向量坐标换,其结果就是将向量往各个轴方向拉伸或压缩:
从上图可以看到,如果A不是满秩的话,那么就是说对角阵的对角线上元素存在0,这时候就会导致维度退化,这样就会使映射后的向量落入m维空间的子空间中。
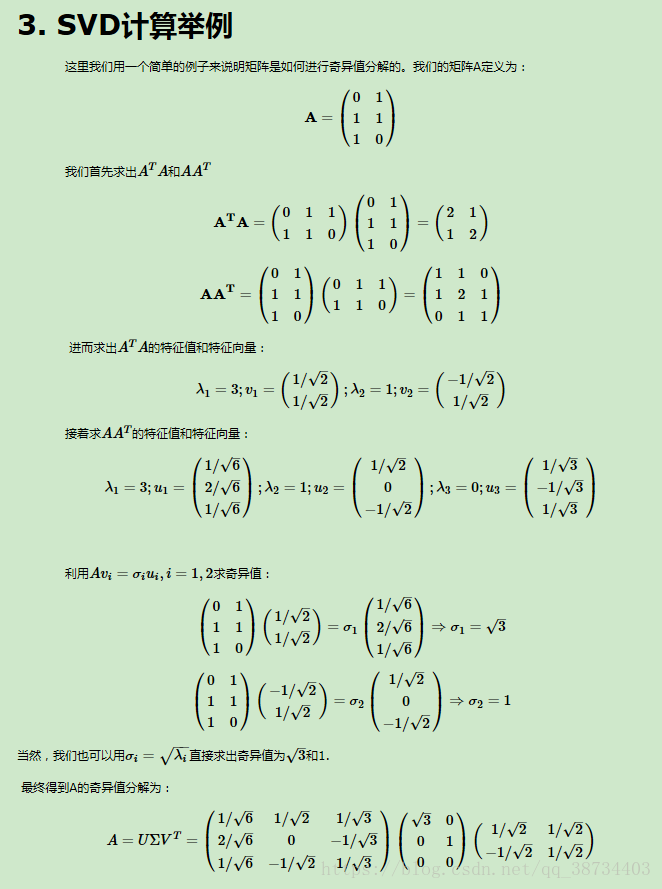
下面重点谈谈奇异值分解。特征值分解是一个提取矩阵特征很不错的方法,但是它只是对方阵而言的,在现实的世界中,我们看到的大部分矩阵都不是方阵,比如说有N个学生,每个学生有M科成绩,这样形成的一个N * M的矩阵就不可能是方阵,我们怎样才能描述这样普通的矩阵呢的重要特征呢?奇异值分解可以用来干这个事情,奇异值分解是一个能适用于任意的矩阵的一种分解的方法:
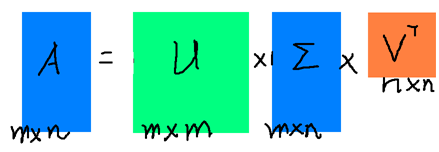

奇异值分解――SVD
上面的特征值分解的A矩阵是对称阵,根据EVD可以找到一个(超)矩形使得变换后还是(超)矩形,也即A可以将一组正交基映射到另一组正交基!那么现在来分析:对任意M*N的矩阵,能否找到一组正交基使得经过它变换后还是正交基?答案是肯定的,它就是SVD分解的精髓所在。
现在假设存在M*N矩阵A,事实上,A矩阵将n维空间中的向量映射到k(k<=m)维空间中,k=Rank(A)。现在的目标就是:在n维空间中找一组正交基,使得经过A变换后还是正交的。假设已经找到这样一组正交基:
则A矩阵将这组基映射为:

如果要使他们两两正交,即

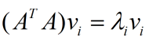
根据假设,存在

所以如果正交基v选择为A'A的特征向量的话,由于A'A是对称阵,v之间两两正交,那么
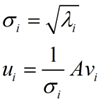
这样就找到了正交基使其映射后还是正交基了,现在,将映射后的正交基单位化:
因为

所以有
所以取单位向量
由此可得

当k < i <= m时,对u1,u2,...,uk进行扩展u(k+1),...,um,使得u1,u2,...,um为m维空间中的一组正交基,即

同样的,对v1,v2,...,vk进行扩展v(k+1),...,vn(这n-k个向量存在于A的零空间中,即Ax=0的解空间的基),使得v1,v2,...,vn为n维空间中的一组正交基,即

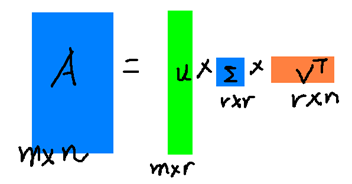
则可得到
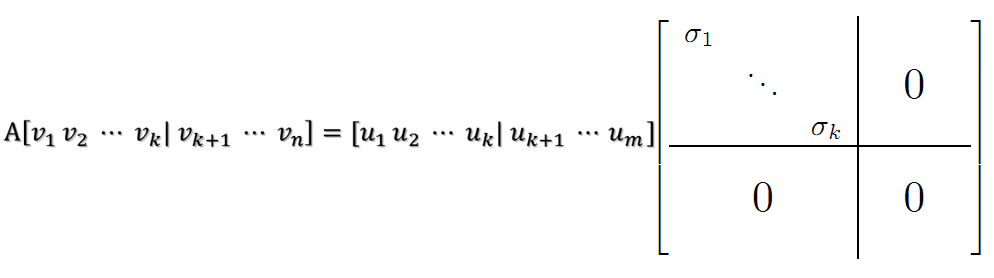
继而可以得到A矩阵的奇异值分解: