һ��MTK6580 ƽ̨ Camera ����������
mtkƽ̨����������У�camera�ĵ����Ѷ��������Ҳ����࣬Ϊ���صط�����һ������camera��������
ʵ�ֹ��̣�����Ϊcamera�����������ͼ��
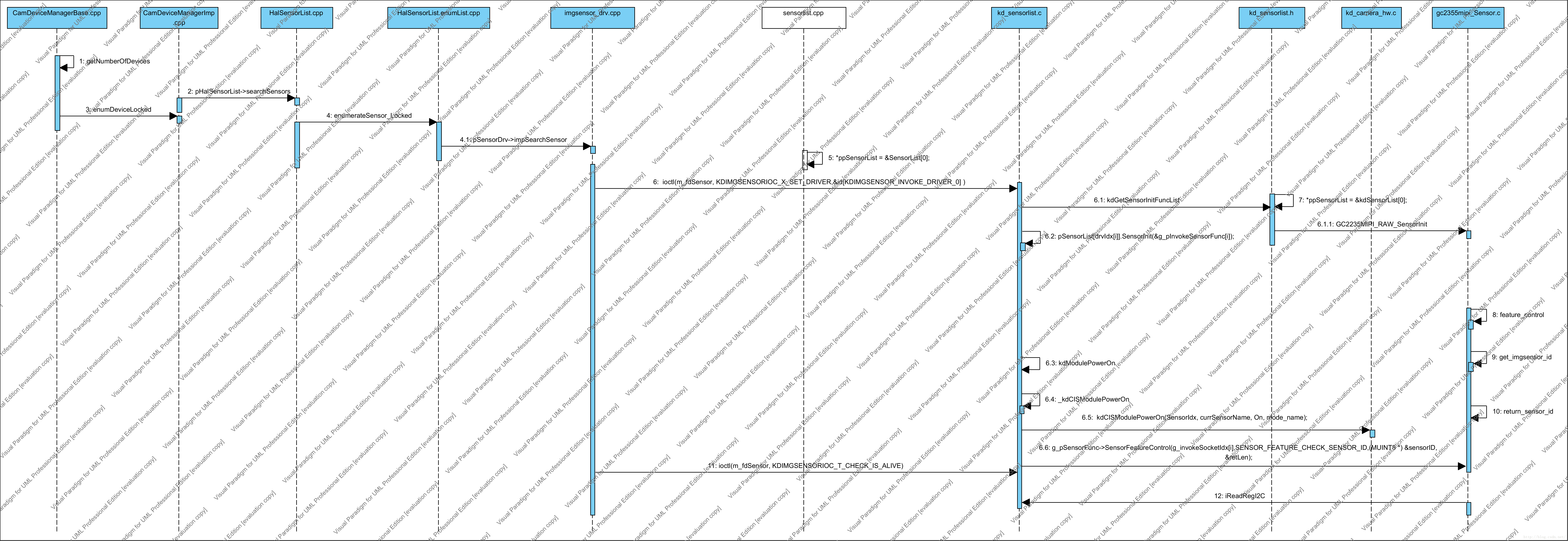
��ͼ�п��Կ�����������ܷ�Ϊ��������hal���������ã�kernel���ͨ������sensorlist.c �;���IC������
xxxx_mipi_raw.c��kernel������ֱ��ȥ����Ӳ��sensor,���ǻ�ע����ص�������֮��Androidϵͳ������
��������صķ����磺camera_service����camera�����л�ֱ��ȥ����hal,kernel��������������camera��
Ϊ�˱���Ҳ�����˲���hal��ĵ���,����camera_service�����½ڻ�������䡣
���� Camera �����ľ���ʵ��
========================HAL �㲿�ֳ�ʼ����========================
�ļ���vendor/mediatek/proprietary/hardware/mtkcam/common/module_hal/devicemgr/CamDeviceManagerBase.cpp
- int32_t
- CamDeviceManagerBase::
- getNumberOfDevices()
- {
- ��
- mi4DeviceNum = enumDeviceLocked();
- ��
- }
int32_t
CamDeviceManagerBase::
getNumberOfDevices()
{
��
mi4DeviceNum = enumDeviceLocked(); ...
}�ļ���vendor/mediatek/proprietary/hardware/mtkcam/legacy/platform/mt6580/devicemgr/CamDeviceManagerImp.cpp
- int32_t
- CamDeviceManagerImp::
- enumDeviceLocked()
- {
- ��
- //����������������������������������������������������
- #if ��1��==MTKCAM_HAVE_SENSOR_HAL
- //
- IHalSensorList*const pHalSensorList = IHalSensorList::get();
- size_t const sensorNum = pHalSensorList->searchSensors();
- #endif
- ��
- return i4DeviceNum;
- }
int32_t
CamDeviceManagerImp::
enumDeviceLocked()
{
��
//����������������������������������������������������if ��1��==MTKCAM_HAVE_SENSOR_HAL
//
IHalSensorList*const pHalSensorList = IHalSensorList::get();
size_t const sensorNum = pHalSensorList->searchSensors();
endif
...
return i4DeviceNum;
}�ļ���vendor/mediatek/proprietary/hardware/mtkcam/legacy/platform/mt6580/hal/sensor/HalSensorList.cpp
- MUINT
- HalSensorList::
- searchSensors()
- {
- Mutex::Autolock _l(mEnumSensorMutex);
- //
- MY_LOGD(��searchSensors��);
- return enumerateSensor_Locked();
- }
MUINT
HalSensorList::
searchSensors()
{
Mutex::Autolock _l(mEnumSensorMutex);
//
MY_LOGD("searchSensors");
return enumerateSensor_Locked();
}- MUINT
- HalSensorList::
- enumerateSensor_Locked()
- {
- ��.
- MUINT halSensorDev = SENSOR_DEV_NONE;
- NSFeature::SensorInfoBase* pSensorInfo ;
- SensorDrv const pSensorDrv = SensorDrv::get();
- SeninfDrv const pSeninfDrv = SeninfDrv::createInstance();
- int const iSensorsList = pSensorDrv->impSearchSensor(NULL);
- ��.
- }
MUINT
HalSensorList::
enumerateSensor_Locked()
{
��.MUINT halSensorDev = SENSOR_DEV_NONE;
NSFeature::SensorInfoBase* pSensorInfo ;SensorDrv *const pSensorDrv = SensorDrv::get();
SeninfDrv *const pSeninfDrv = SeninfDrv::createInstance();int const iSensorsList = pSensorDrv->impSearchSensor(NULL);....
}�ļ���vendor/mediatek/proprietary/hardware/mtkcam/legacy/platform/mt6580/hal/sensor/imgsensor_drv.cpp
- MINT32
- ImgSensorDrv::impSearchSensor(pfExIdChk pExIdChkCbf)
- {
- ��.
- GetSensorInitFuncList(&m_pstSensorInitFunc);
- LOG_MSG(��SENSOR search start \n��);
- sprintf(cBuf,��/dev/%s��,CAMERA_HW_DEVNAME);
- m_fdSensor = ::open(cBuf, O_RDWR);
- ����
- for (i = 0; i < MAX_NUM_OF_SUPPORT_SENSOR; i++) {
- ��.
- err = ioctl(m_fdSensor, KDIMGSENSORIOC_X_SET_DRIVER,&id[KDIMGSENSOR_INVOKE_DRIVER_0] );
- ��
- err = ioctl(m_fdSensor, KDIMGSENSORIOC_T_CHECK_IS_ALIVE);
- ����
- }
MINT32
ImgSensorDrv::impSearchSensor(pfExIdChk pExIdChkCbf)
{
��.GetSensorInitFuncList(&m_pstSensorInitFunc);LOG_MSG("SENSOR search start \n");sprintf(cBuf,"/dev/%s",CAMERA_HW_DEVNAME);
m_fdSensor = ::open(cBuf, O_RDWR);......for (i = 0; i < MAX_NUM_OF_SUPPORT_SENSOR; i++) {....err = ioctl(m_fdSensor, KDIMGSENSORIOC_X_SET_DRIVER,&id[KDIMGSENSOR_INVOKE_DRIVER_0] );...err = ioctl(m_fdSensor, KDIMGSENSORIOC_T_CHECK_IS_ALIVE);......
}GetSensorInitFuncList��ʵ��
�ļ���vendor/mediatek/proprietary/custom/mt6580/hal/imgsensor_src/sensorlist.cpp
- UINT32 GetSensorInitFuncList(MSDK_SENSOR_INIT_FUNCTION_STRUCT **ppSensorList)
- {
- if (NULL == ppSensorList) {
- ALOGE(��ERROR: NULL pSensorList\n��);
- return MHAL_UNKNOWN_ERROR;
- }
- *ppSensorList = &SensorList[0];
- return MHAL_NO_ERROR;
- }
UINT32 GetSensorInitFuncList(MSDK_SENSOR_INIT_FUNCTION_STRUCT **ppSensorList)
{
if (NULL == ppSensorList) {
ALOGE("ERROR: NULL pSensorList\n");
return MHAL_UNKNOWN_ERROR;
}
*ppSensorList = &SensorList[0];
return MHAL_NO_ERROR;
} - MSDK_SENSOR_INIT_FUNCTION_STRUCT SensorList[] =
- {
- //xc add camera start
- #if defined(GC2365MIPI_RAW)
- RAW_INFO(GC2365MIPI_SENSOR_ID, SENSOR_DRVNAME_GC2365MIPI_RAW, NULL),
- #endif
- #if defined(GC2355_MIPI_RAW_BAIKANG_M8112)
- RAW_INFO(GC2355_SENSOR_ID, SENSOR_DRVNAME_GC2355_MIPI_RAW,NULL),
- #endif
- ��.
- }
MSDK_SENSOR_INIT_FUNCTION_STRUCT SensorList[] =
{
//xc add camera startif defined(GC2365MIPI_RAW)
RAW_INFO(GC2365MIPI_SENSOR_ID, SENSOR_DRVNAME_GC2365MIPI_RAW, NULL),
endif
if defined(GC2355_MIPI_RAW_BAIKANG_M8112)
RAW_INFO(GC2355_SENSOR_ID, SENSOR_DRVNAME_GC2355_MIPI_RAW,NULL),
endif
��.
}��ȡsensor�б�������ͨ����
err = ioctl(m_fdSensor, KDIMGSENSORIOC_X_SET_DRIVER,&id[KDIMGSENSOR_INVOKE_DRIVER_0] );
err = ioctl(m_fdSensor, KDIMGSENSORIOC_T_CHECK_IS_ALIVE);
����kernel�������
====================== Kernel ��������ʵ�� ========================
1. ���ǰ����ע��platform �豸������
�ļ���kernel-3.18/drivers/misc/mediatek/imgsensor/src/mt6580/kd_sensorlist.c
- static int __init CAMERA_HW_i2C_init(void)
- {
- ��.
- if (platform_driver_register(&g_stCAMERA_HW_Driver)) //ע������platform ����
- if (platform_driver_register(&g_stCAMERA_HW_Driver2)) //ע�ḱ��platform ����
- ��.
- return 0;
- }
static int __init CAMERA_HW_i2C_init(void)
{
��.if (platform_driver_register(&g_stCAMERA_HW_Driver)) //ע������platform ����
if (platform_driver_register(&g_stCAMERA_HW_Driver2)) //ע�ḱ��platform ����....
return 0;
}����ƽ̨�����Ķ��壺
- #ifdef CONFIG_OF
- static const struct of_device_id CAMERA_HW_of_ids[] = {
- {.compatible = ��mediatek,camera_hw��,}, //����ƥ�����
- {}
- };
- #endif
- static struct platform_driver g_stCAMERA_HW_Driver = {
- .probe = CAMERA_HW_probe,
- .remove = CAMERA_HW_remove,
- .suspend = CAMERA_HW_suspend,
- .resume = CAMERA_HW_resume,
- .driver = {
- .name = ��image_sensor��,
- .owner = THIS_MODULE,
- #ifdef CONFIG_OF
- .of_match_table = CAMERA_HW_of_ids,
- #endif
- }
- };
#ifdef CONFIG_OF
static const struct of_device_id CAMERA_HW_of_ids[] = {
{.compatible = ��mediatek,camera_hw��,}, //����ƥ�����
{}
};endif
static struct platform_driver g_stCAMERA_HW_Driver = {
.probe = CAMERA_HW_probe,
.remove = CAMERA_HW_remove,
.suspend = CAMERA_HW_suspend,
.resume = CAMERA_HW_resume,
.driver = {
.name = ��image_sensor��,
.owner = THIS_MODULE,
ifdef CONFIG_OF
.of_match_table = CAMERA_HW_of_ids,
endif
}
};����ƽ̨�����Ķ��壺
- #ifdef CONFIG_OF
- static const struct of_device_id CAMERA_HW2_of_ids[] = {
- {.compatible = ��mediatek,camera_hw2��,},//����ƥ�����
- {}
- };
- #endif
- static struct platform_driver g_stCAMERA_HW_Driver2 = {
- .probe = CAMERA_HW_probe2,
- .remove = CAMERA_HW_remove2,
- .suspend = CAMERA_HW_suspend2,
- .resume = CAMERA_HW_resume2,
- .driver = {
- .name = ��image_sensor_bus2��,
- .owner = THIS_MODULE,
- #ifdef CONFIG_OF
- .of_match_table = CAMERA_HW2_of_ids,
- #endif
- }
- };
#ifdef CONFIG_OF
static const struct of_device_id CAMERA_HW2_of_ids[] = {
{.compatible = ��mediatek,camera_hw2��,},//����ƥ�����
{}
};endif
static struct platform_driver g_stCAMERA_HW_Driver2 = {
.probe = CAMERA_HW_probe2,
.remove = CAMERA_HW_remove2,
.suspend = CAMERA_HW_suspend2,
.resume = CAMERA_HW_resume2,
.driver = {
.name = ��image_sensor_bus2��,
.owner = THIS_MODULE,
ifdef CONFIG_OF
.of_match_table = CAMERA_HW2_of_ids,
endif
}
};������cam��dts�ж����豸��Ϣ��
- kd_camera_hw1:kd_camera_hw1@15008000 {
- compatible = ��mediatek,camera_hw��; //������������һ��
- reg = <0x15008000 0x1000>; / SENINF_ADDR /
- vcama-supply = <&mt_pmic_vcama_ldo_reg>;
- vcamd-supply = <&mt_pmic_vcamd_ldo_reg>;
- vcamaf-supply = <&mt_pmic_vcamaf_ldo_reg>;
- vcamio-supply = <&mt_pmic_vcamio_ldo_reg>;
- };
- kd_camera_hw2:kd_camera_hw2@15008000 {
- compatible = ��mediatek,camera_hw2��; //����������һ��
- reg = <0x15008000 0x1000>; / SENINF_ADDR /
- };
kd_camera_hw1:kd_camera_hw1@15008000 {
compatible = ��mediatek,camera_hw��; //������������һ��
reg = <0x15008000 0x1000>; /* SENINF_ADDR */
vcama-supply = <&mt_pmic_vcama_ldo_reg>;
vcamd-supply = <&mt_pmic_vcamd_ldo_reg>;
vcamaf-supply = <&mt_pmic_vcamaf_ldo_reg>;
vcamio-supply = <&mt_pmic_vcamio_ldo_reg>;};
kd_camera_hw2:kd_camera_hw2@15008000 {
compatible = ��mediatek,camera_hw2��; //����������һ��
reg = <0x15008000 0x1000>; /* SENINF_ADDR */
}; ���ں����������dts�������ɵ�dtb�ļ���ע�����涨���device,����������ж���idһ�£������������
����ע��������platform ����g_stCAMERA_HW_Driver��g_stCAMERA_HW_Driver2�����ƥ��ɹ�����ø��Ե�
probe����CAMERA_HW_probe��CAMERA_HW_probe2
2. ƽ̨probe ������ʵ��
����probe��CAMERA_HW_probe��ʵ�����£�
- static int CAMERA_HW_probe(struct platform_device *pdev)
- {
- #if !defined(CONFIG_MTK_LEGACY)
- mtkcam_gpio_init(pdev);
- mtkcam_pin_mux_init(pdev);
- #endif
- return i2c_add_driver(&CAMERA_HW_i2c_driver);
- }
static int CAMERA_HW_probe(struct platform_device *pdev)
{
if !defined(CONFIG_MTK_LEGACY)
mtkcam_gpio_init(pdev);
mtkcam_pin_mux_init(pdev);
endif
return i2c_add_driver(&CAMERA_HW_i2c_driver);
}����probe��CAMERA_HW_probe��ʵ�����£�
- static int CAMERA_HW_probe2(struct platform_device *pdev)
- {
- return i2c_add_driver(&CAMERA_HW_i2c_driver2);
- }
static int CAMERA_HW_probe2(struct platform_device *pdev)
{
return i2c_add_driver(&CAMERA_HW_i2c_driver2);
}CAMERA_HW_i2c_driver2�� main sensor ��CAMERA_HW_i2c_driver�������£�
- #ifdef CONFIG_OF
- static const struct of_device_id CAMERA_HW_i2c_of_ids[] = {
- { .compatible = ��mediatek,camera_main��, },
- {}
- };
- #endif
- struct i2c_driver CAMERA_HW_i2c_driver = {
- .probe = CAMERA_HW_i2c_probe,
- .remove = CAMERA_HW_i2c_remove,
- .driver = {
- .name = CAMERA_HW_DRVNAME1,
- .owner = THIS_MODULE,
- #ifdef CONFIG_OF
- .of_match_table = CAMERA_HW_i2c_of_ids,
- #endif
- },
- .id_table = CAMERA_HW_i2c_id,
- };
- sub sensor ��CAMERA_HW_i2c_driver�������£�
- #ifdef CONFIG_OF
- static const struct of_device_id CAMERA_HW2_i2c_driver_of_ids[] = {
- { .compatible = ��mediatek,camera_sub��, },
- {}
- };
- #endif
- struct i2c_driver CAMERA_HW_i2c_driver2 = {
- .probe = CAMERA_HW_i2c_probe2,
- .remove = CAMERA_HW_i2c_remove2,
- .driver = {
- .name = CAMERA_HW_DRVNAME2,
- .owner = THIS_MODULE,
- #ifdef CONFIG_OF
- .of_match_table = CAMERA_HW2_i2c_driver_of_ids,
- #endif
- },
- .id_table = CAMERA_HW_i2c_id2,
- };
#ifdef CONFIG_OF
static const struct of_device_id CAMERA_HW_i2c_of_ids[] = {
{ .compatible = ��mediatek,camera_main��, },
{}
};endif
struct i2c_driver CAMERA_HW_i2c_driver = {
.probe = CAMERA_HW_i2c_probe,
.remove = CAMERA_HW_i2c_remove,
.driver = {
.name = CAMERA_HW_DRVNAME1,
.owner = THIS_MODULE,
ifdef CONFIG_OF
.of_match_table = CAMERA_HW_i2c_of_ids,
endif
},
.id_table = CAMERA_HW_i2c_id,
};
sub sensor ��CAMERA_HW_i2c_driver�������£�
ifdef CONFIG_OF
static const struct of_device_id CAMERA_HW2_i2c_driver_of_ids[] = {
{ .compatible = "mediatek,camera_sub", },
{}
};
endif
struct i2c_driver CAMERA_HW_i2c_driver2 = {
.probe = CAMERA_HW_i2c_probe2,
.remove = CAMERA_HW_i2c_remove2,
.driver = {
.name = CAMERA_HW_DRVNAME2,
.owner = THIS_MODULE,
ifdef CONFIG_OF
.of_match_table = CAMERA_HW2_i2c_driver_of_ids,
endif
},
.id_table = CAMERA_HW_i2c_id2,
};��Ӧmain/sub camera i2c �豸dts��������
�ļ���kernel-3.18/arch/arm/boot/dts/cust_i2c.dtsi
- &i2c0 {
- camera_main@10 {
- compatible = ��mediatek,camera_main��; //�� CAMERA_HW_i2c_driver�����һ��
- reg = <0x10>;
- };
- camera_main_af@0c {
- compatible = ��mediatek,camera_main_af��;
- reg = <0x0c>;
- };
- camera_sub@3c {
- compatible = ��mediatek,camera_sub��; //��CAMERA_HW_i2c_driver2�����һ��
- reg = <0x3c>;
- };
- };
&i2c0 {
camera_main@10 {
compatible = ��mediatek,camera_main��; //�� CAMERA_HW_i2c_driver�����һ��
reg = <0x10>;
};camera_main_af@0c {compatible = "mediatek,camera_main_af";reg = <0x0c>;
};camera_sub@3c {compatible = "mediatek,camera_sub"; //��CAMERA_HW_i2c_driver2�����һ��reg = <0x3c>;
};
};3. I2c probe��ʵ��
���Ͽ��Կ���main/sub sensor�ڸ��Ե�ƽ̨probe�У�ע����i2c_driver,�����Ե�i2c_driver���豸ƥ��
�����ƥ�䱾�²����������ɹ�����ø��Ե�i2c_probe������main sensor ��probe����
CAMERA_HW_i2c_probe��
- static int CAMERA_HW_i2c_probe(struct i2c_client *client, const struct i2c_device_id *id)
- {
- ��..
- /* Register char driver */
- i4RetValue = RegisterCAMERA_HWCharDrv();
- ��..
- return 0;
- }
static int CAMERA_HW_i2c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{...../* Register char driver */i4RetValue = RegisterCAMERA_HWCharDrv();.....return 0;
}- static int CAMERA_HW_i2c_probe2(struct i2c_client *client, const struct i2c_device_id *id)
- {
- ��..
- /* Register char driver */
- i4RetValue = RegisterCAMERA_HWCharDrv2();
- ��..
- }
static int CAMERA_HW_i2c_probe2(struct i2c_client *client, const struct i2c_device_id *id)
{...../* Register char driver */i4RetValue = RegisterCAMERA_HWCharDrv2();.....
}- static inline int RegisterCAMERA_HWCharDrv(void)//main sensor ע��cdev
- {
- ��..
- /* Attatch file operation. */
- cdev_init(g_pCAMERA_HW_CharDrv, &g_stCAMERA_HW_fops); //��ʼ���ַ��豸
- /* Add to system */
- cdev_add(g_pCAMERA_HW_CharDrv, g_CAMERA_HWdevno, 1) //ע�ᵽ�ں�
- //����Ŀ¼ /sys/class/sensordrv/
- sensor_class = class_create(THIS_MODULE, ��sensordrv��);
- //����Ŀ¼/sys/class/sensordrv/kd_camera_hw
- sensor_device = device_create(sensor_class, NULL, g_CAMERA_HWdevno, NULL, CAMERA_HW_DRVNAME1);
- ��.
- return 0;
- }
- static inline int RegisterCAMERA_HWCharDrv2(void)//sub sensor ע��cdev
- {
- ��.
- /* Attatch file operation. */
- cdev_init(g_pCAMERA_HW_CharDrv2, &g_stCAMERA_HW_fops0);//��ʼ���ַ��豸
- /* Add to system */
- cdev_add(g_pCAMERA_HW_CharDrv2, g_CAMERA_HWdevno2, 1));//ע�ᵽ�ں�
- //����Ŀ¼ /sys/class/sensordrv2/
- sensor2_class = class_create(THIS_MODULE, ��sensordrv2��);
- //����Ŀ¼/sys/class/sensordrv2/kd_camera_hw_bus2
- sensor_device2 = device_create(sensor2_class, NULL, g_CAMERA_HWdevno2, NULL, CAMERA_HW_DRVNAME2);
- ��.
- return 0;
- }
- main/sub �������Ե��ַ��豸�����а��Ե�fops,g_stCAMERA_HW_fops��g_stCAMERA_HW_fops0
- ���Ǹ��Զ�������
- static const struct file_operations g_stCAMERA_HW_fops = { //main sensor fops
- .owner = THIS_MODULE,
- .open = CAMERA_HW_Open,
- .release = CAMERA_HW_Release,
- .unlocked_ioctl = CAMERA_HW_Ioctl,
- #ifdef CONFIG_COMPAT
- .compat_ioctl = CAMERA_HW_Ioctl_Compat,
- #endif
- };
- static const struct file_operations g_stCAMERA_HW_fops0 = { //sub sensor fops
- .owner = THIS_MODULE,
- .open = CAMERA_HW_Open2,
- .release = CAMERA_HW_Release2,
- .unlocked_ioctl = CAMERA_HW_Ioctl,
- #ifdef CONFIG_COMPAT
- .compat_ioctl = CAMERA_HW_Ioctl_Compat,
- #endif
- };
static inline int RegisterCAMERA_HWCharDrv(void)//main sensor ע��cdev
{...../* Attatch file operation. */cdev_init(g_pCAMERA_HW_CharDrv, &g_stCAMERA_HW_fops); //��ʼ���ַ��豸/* Add to system */cdev_add(g_pCAMERA_HW_CharDrv, g_CAMERA_HWdevno, 1) //ע�ᵽ�ں�//����Ŀ¼ /sys/class/sensordrv/sensor_class = class_create(THIS_MODULE, "sensordrv"); //����Ŀ¼/sys/class/sensordrv/kd_camera_hw sensor_device = device_create(sensor_class, NULL, g_CAMERA_HWdevno, NULL, CAMERA_HW_DRVNAME1); .... return 0;
}
static inline int RegisterCAMERA_HWCharDrv2(void)//sub sensor ע��cdev
{..../* Attatch file operation. */cdev_init(g_pCAMERA_HW_CharDrv2, &g_stCAMERA_HW_fops0);//��ʼ���ַ��豸 /* Add to system */cdev_add(g_pCAMERA_HW_CharDrv2, g_CAMERA_HWdevno2, 1));//ע�ᵽ�ں�//����Ŀ¼ /sys/class/sensordrv2/sensor2_class = class_create(THIS_MODULE, "sensordrv2");//����Ŀ¼/sys/class/sensordrv2/kd_camera_hw_bus2sensor_device2 = device_create(sensor2_class, NULL, g_CAMERA_HWdevno2, NULL, CAMERA_HW_DRVNAME2);....return 0;
}
main/sub �������Ե��ַ��豸�����а��Ե�fops,g_stCAMERA_HW_fops��g_stCAMERA_HW_fops0
���Ǹ��Զ�������
static const struct file_operations g_stCAMERA_HW_fops = { //main sensor fops.owner = THIS_MODULE,.open = CAMERA_HW_Open,.release = CAMERA_HW_Release,.unlocked_ioctl = CAMERA_HW_Ioctl,ifdef CONFIG_COMPAT
.compat_ioctl = CAMERA_HW_Ioctl_Compat,
endif
};
static const struct file_operations g_stCAMERA_HW_fops0 = { //sub sensor fops
.owner = THIS_MODULE,
.open = CAMERA_HW_Open2,
.release = CAMERA_HW_Release2,
.unlocked_ioctl = CAMERA_HW_Ioctl,
ifdef CONFIG_COMPAT
.compat_ioctl = CAMERA_HW_Ioctl_Compat,
endif
};
���Ͽ��Կ������Ե�fopsָ������ͬ��Iioctl��������ζ���ϲ����main/sub sensor ֻ��Ҫ��Ӧһ���ײ�
��ioctl���ɣ�����sensor�����ֿ��Խ���idx,����ὲ��
- /*******************************************************************************
- * CAMERA_HW_Ioctl
- ********************************************************************************/
- static long CAMERA_HW_Ioctl(struct file *a_pstFile,
- unsigned int a_u4Command, unsigned long a_u4Param)
- {
- ��
- pIdx = (u32 *) pBuff;
- switch (a_u4Command) {
- ��
- case KDIMGSENSORIOC_X_SET_DRIVER:
- i4RetValue = kdSetDriver((unsigned int *)pBuff);
- break;
- case KDIMGSENSORIOC_X_FEATURECONCTROL:
- i4RetValue = adopt_CAMERA_HW_FeatureControl(pBuff);
- break;
- case KDIMGSENSORIOC_T_CHECK_IS_ALIVE:
- i4RetValue = adopt_CAMERA_HW_CheckIsAlive();
- break;
- ��.
- default:
- PK_DBG(��No such command\n��);
- i4RetValue = -EPERM;
- break;
- }
- ��..
- }
/*******************************************************************************
* CAMERA_HW_Ioctl
********************************************************************************/static long CAMERA_HW_Ioctl(struct file *a_pstFile,unsigned int a_u4Command, unsigned long a_u4Param)
{...pIdx = (u32 *) pBuff;switch (a_u4Command) {...case KDIMGSENSORIOC_X_SET_DRIVER:i4RetValue = kdSetDriver((unsigned int *)pBuff);break;case KDIMGSENSORIOC_X_FEATURECONCTROL:i4RetValue = adopt_CAMERA_HW_FeatureControl(pBuff);break;case KDIMGSENSORIOC_T_CHECK_IS_ALIVE:i4RetValue = adopt_CAMERA_HW_CheckIsAlive();break;....default:PK_DBG("No such command\n");i4RetValue = -EPERM;break;}.....
}============================== HAL ����Kernel ���������� ========================
ǰ�������HAL�����ioctl �� kernel��ע������������������������HAL����� ������ �����ʵ�����̡�
4. ioctl �ײ��ʵ��
4.1������ioctl(m_fdSensor, KDIMGSENSORIOC_X_SET_DRIVER,&id[KDIMGSENSOR_INVOKE_DRIVER_0] );
��KDIMGSENSORIOC_X_SET_DRIVER������ʱ�������kernel���kdSetDriver�ӿ�
- int kdSetDriver(unsigned int *pDrvIndex)
- {
- ��
- kdGetSensorInitFuncList(&pSensorList)) //���sensor��ʼ���б�
- for (i = KDIMGSENSOR_INVOKE_DRIVER_0; i < KDIMGSENSOR_MAX_INVOKE_DRIVERS; i++) {
- ��.
- pSensorList[drvIdx[i]].SensorInit(&g_pInvokeSensorFunc[i]); //��ȡ����cam������Init�������
- ��.
- }
- return 0;
- }
int kdSetDriver(unsigned int *pDrvIndex)
{...kdGetSensorInitFuncList(&pSensorList)) //���sensor��ʼ���б�for (i = KDIMGSENSOR_INVOKE_DRIVER_0; i < KDIMGSENSOR_MAX_INVOKE_DRIVERS; i++) {....pSensorList[drvIdx[i]].SensorInit(&g_pInvokeSensorFunc[i]); //��ȡ����cam������Init�������....}return 0;
}- UINT32 kdGetSensorInitFuncList(ACDK_KD_SENSOR_INIT_FUNCTION_STRUCT **ppSensorList)
- {
- if (NULL == ppSensorList) {
- PK_ERR(��[kdGetSensorInitFuncList]ERROR: NULL ppSensorList\n��);
- return 1;
- }
- *ppSensorList = &kdSensorList[0]; //��ȡsensorlist������ַ
- return 0;
- } /* kdGetSensorInitFuncList() */
UINT32 kdGetSensorInitFuncList(ACDK_KD_SENSOR_INIT_FUNCTION_STRUCT **ppSensorList)
{if (NULL == ppSensorList) {PK_ERR("[kdGetSensorInitFuncList]ERROR: NULL ppSensorList\n");return 1;}*ppSensorList = &kdSensorList[0]; //��ȡsensorlist������ַreturn 0;
} /* kdGetSensorInitFuncList() */
�ļ���kernel-3.18/drivers/misc/mediatek/imgsensor/src/mt6580/kd_sensorlist.h
- ACDK_KD_SENSOR_INIT_FUNCTION_STRUCT kdSensorList[MAX_NUM_OF_SUPPORT_SENSOR+1] =
- {
- ��.
- #if defined(SUB_GC2355_MIPI_RAW)
- {GC2355S_SENSOR_ID, SENSOR_DRVNAME_GC2355S_MIPI_RAW,Sub_GC2355_MIPI_RAW_SensorInit},
- #endif
- ��.
- }
ACDK_KD_SENSOR_INIT_FUNCTION_STRUCT kdSensorList[MAX_NUM_OF_SUPPORT_SENSOR+1] =
{....if defined(SUB_GC2355_MIPI_RAW)
{GC2355S_SENSOR_ID, SENSOR_DRVNAME_GC2355S_MIPI_RAW,Sub_GC2355_MIPI_RAW_SensorInit},
endif
....
}��ȡ�б�֮������ŵ��ø��Ե�Init����,������GC2355Ϊ��
- UINT32 GC2235MIPI_RAW_SensorInit(PSENSOR_FUNCTION_STRUCT pfFunc)
- {
- / To Do : Check Sensor status here /
- if (pfFunc!=NULL)
- *pfFunc=&sensor_func;
- return ERROR_NONE;
- } / GC2235MIPI_RAW_SensorInit */
UINT32 GC2235MIPI_RAW_SensorInit(PSENSOR_FUNCTION_STRUCT *pfFunc)
{
/* To Do : Check Sensor status here */
if (pfFunc!=NULL)
*pfFunc=&sensor_func;
return ERROR_NONE;
} /* GC2235MIPI_RAW_SensorInit */���п��Կ�����gc2355��Init������ַ������pfFunc��Ҳ����ʱ������ͨ����������ֱ��ƾ��
pfunָ�����sensorlist�е�����
4.2 ������ioctl(m_fdSensor, KDIMGSENSORIOC_T_CHECK_IS_ALIVE);
��KDIMGSENSORIOC_T_CHECK_IS_ALIVE������ʱ�������kernel���adopt_CAMERA_HW_CheckIsAlive
Control�ӿ�
- static inline int adopt_CAMERA_HW_CheckIsAlive(void)
- {
- ��.
- /* power on sensor */
- kdModulePowerOn((CAMERA_DUAL_CAMERA_SENSOR_ENUM *) g_invokeSocketIdx, g_invokeSensorNameStr,
- true, CAMERA_HW_DRVNAME1);
- ��.
- if (g_pSensorFunc) {
- for (i = KDIMGSENSOR_INVOKE_DRIVER_0; i < KDIMGSENSOR_MAX_INVOKE_DRIVERS; i++) {
- if (DUAL_CAMERA_NONE_SENSOR != g_invokeSocketIdx[i]) {
- err =
- g_pSensorFunc->SensorFeatureControl(g_invokeSocketIdx[i],
- SENSOR_FEATURE_CHECK_SENSOR_ID,
- (MUINT8 *) &sensorID,
- &retLen);
- if (sensorID == 0) { /* not implement this feature ID */
- PK_DBG
- (�� Not implement!!, use old open function to check\n��);
- err = ERROR_SENSOR_CONNECT_FAIL;
- } else if (sensorID == 0xFFFFFFFF) { /* fail to open the sensor */
- PK_DBG(�� No Sensor Found��);
- err = ERROR_SENSOR_CONNECT_FAIL;
- } else {
- PK_INF(�� Sensor found ID = 0x%x\n��, sensorID);
- snprintf(mtk_ccm_name, sizeof(mtk_ccm_name),
- ��%s CAM[%d]:%s;��, mtk_ccm_name,
- g_invokeSocketIdx[i], g_invokeSensorNameStr[i]);
- psensorResolution[0] = &sensorResolution[0];
- psensorResolution[1] = &sensorResolution[1];
- // don��t care of the result
- g_pSensorFunc->SensorGetResolution(psensorResolution);
- if(g_invokeSocketIdx[i] == DUAL_CAMERA_MAIN_SENSOR)
- curr_sensor_id = 0;
- else if(g_invokeSocketIdx[i] == DUAL_CAMERA_SUB_SENSOR)
- curr_sensor_id = 1;
- /* fill the cam infos with name/width/height */
- snprintf(g_cam_infos, sizeof(g_cam_infos),��%s CAM[%d]:%s,Width:%d, Height:%d;��,
- g_cam_infos, g_invokeSocketIdx[i], g_invokeSensorNameStr[i],
- sensorResolution[curr_sensor_id].SensorFullWidth, sensorResolution[curr_sensor_id].SensorFullHeight);
- err = ERROR_NONE;
- }
- if (ERROR_NONE != err) {
- PK_DBG
- (��ERROR:adopt_CAMERA_HW_CheckIsAlive(), No imgsensor alive\n��);
- }
- }
- }
- } else {
- PK_DBG(��ERROR:NULL g_pSensorFunc\n��);
- }
- } /* adopt_CAMERA_HW_Open() */
static inline int adopt_CAMERA_HW_CheckIsAlive(void)
{..../* power on sensor */kdModulePowerOn((CAMERA_DUAL_CAMERA_SENSOR_ENUM *) g_invokeSocketIdx, g_invokeSensorNameStr,true, CAMERA_HW_DRVNAME1);....if (g_pSensorFunc) {for (i = KDIMGSENSOR_INVOKE_DRIVER_0; i < KDIMGSENSOR_MAX_INVOKE_DRIVERS; i++) {if (DUAL_CAMERA_NONE_SENSOR != g_invokeSocketIdx[i]) {err =g_pSensorFunc->SensorFeatureControl(g_invokeSocketIdx[i],SENSOR_FEATURE_CHECK_SENSOR_ID,(MUINT8 *) &sensorID,&retLen);if (sensorID == 0) { /* not implement this feature ID */PK_DBG(" Not implement!!, use old open function to check\n");err = ERROR_SENSOR_CONNECT_FAIL;} else if (sensorID == 0xFFFFFFFF) { /* fail to open the sensor */PK_DBG(" No Sensor Found");err = ERROR_SENSOR_CONNECT_FAIL;} else {PK_INF(" Sensor found ID = 0x%x\n", sensorID);snprintf(mtk_ccm_name, sizeof(mtk_ccm_name),"%s CAM[%d]:%s;", mtk_ccm_name,g_invokeSocketIdx[i], g_invokeSensorNameStr[i]);psensorResolution[0] = &sensorResolution[0];psensorResolution[1] = &sensorResolution[1];// don't care of the resultg_pSensorFunc->SensorGetResolution(psensorResolution);if(g_invokeSocketIdx[i] == DUAL_CAMERA_MAIN_SENSOR)curr_sensor_id = 0;else if(g_invokeSocketIdx[i] == DUAL_CAMERA_SUB_SENSOR)curr_sensor_id = 1;/* fill the cam infos with name/width/height */snprintf(g_cam_infos, sizeof(g_cam_infos),"%s CAM[%d]:%s,Width:%d, Height:%d;",g_cam_infos, g_invokeSocketIdx[i], g_invokeSensorNameStr[i],sensorResolution[curr_sensor_id].SensorFullWidth, sensorResolution[curr_sensor_id].SensorFullHeight);err = ERROR_NONE;}if (ERROR_NONE != err) {PK_DBG("ERROR:adopt_CAMERA_HW_CheckIsAlive(), No imgsensor alive\n");}}}} else {PK_DBG("ERROR:NULL g_pSensorFunc\n");}
} /* adopt_CAMERA_HW_Open() */1��ͨ��kdModulePowerOn��Sensor�ϵ�
2��ͨ��SensorFeatureControl��ȡSensorID
�ȿ�kdModulePowerOn��ʵ��
- int
- kdModulePowerOn(CAMERA_DUAL_CAMERA_SENSOR_ENUM socketIdx[KDIMGSENSOR_MAX_INVOKE_DRIVERS],
- char sensorNameStr[KDIMGSENSOR_MAX_INVOKE_DRIVERS][32], BOOL On, char *mode_name)
- {
- MINT32 ret = ERROR_NONE;
- u32 i = 0;
- for (i = KDIMGSENSOR_INVOKE_DRIVER_0; i < KDIMGSENSOR_MAX_INVOKE_DRIVERS; i++) {
- if (g_bEnableDriver[i]) {
- /* PK_XLOG_INFO(��[%s][%d][%d][%s][%s]\r\n��,__FUNCTION__,g_bEnableDriver[i],socketIdx[i],sensorNameStr[i],mode_name); */
- #ifndef CONFIG_FPGA_EARLY_PORTING
- ret = _kdCISModulePowerOn(socketIdx[i], sensorNameStr[i], On, mode_name);
- #endif
- if (ERROR_NONE != ret) {
- PK_ERR(��[%s]��, __func__);
- return ret;
- }
- }
- }
- return ERROR_NONE;
- }
int
kdModulePowerOn(CAMERA_DUAL_CAMERA_SENSOR_ENUM socketIdx[KDIMGSENSOR_MAX_INVOKE_DRIVERS],char sensorNameStr[KDIMGSENSOR_MAX_INVOKE_DRIVERS][32], BOOL On, char *mode_name)
{MINT32 ret = ERROR_NONE;u32 i = 0;for (i = KDIMGSENSOR_INVOKE_DRIVER_0; i < KDIMGSENSOR_MAX_INVOKE_DRIVERS; i++) {if (g_bEnableDriver[i]) {/* PK_XLOG_INFO("[%s][%d][%d][%s][%s]\r\n",__FUNCTION__,g_bEnableDriver[i],socketIdx[i],sensorNameStr[i],mode_name); */ifndef CONFIG_FPGA_EARLY_PORTING
ret = _kdCISModulePowerOn(socketIdx[i], sensorNameStr[i], On, mode_name);
endif
if (ERROR_NONE != ret) {PK_ERR("[%s]", __func__);return ret;}}
}
return ERROR_NONE;
}��kdModulePowerOn���ֵ���_kdCISModulePowerOn
- int _kdCISModulePowerOn(CAMERA_DUAL_CAMERA_SENSOR_ENUM SensorIdx, char *currSensorName, BOOL On,
- char *mode_name)
- {
- ��.
- ret = kdCISModulePowerOn(SensorIdx, currSensorName, On, mode_name);
- ��.
- return ret;
- }
int _kdCISModulePowerOn(CAMERA_DUAL_CAMERA_SENSOR_ENUM SensorIdx, char *currSensorName, BOOL On,
char *mode_name)
{
��.ret = kdCISModulePowerOn(SensorIdx, currSensorName, On, mode_name);
....
return ret;
}��kdCISModulePowerOn�ֵ���kdCISModulePowerOn����
�ļ���kernel-3.18/drivers/misc/mediatek/imgsensor/src/mt6580/camera_hw/kd_camera_hw.c
//�ĺ���Ϊ���µ纯����ͨ������BOOLֵ���ж���/�µ�
- int kdCISModulePowerOn(CAMERA_DUAL_CAMERA_SENSOR_ENUM SensorIdx, char *currSensorName, BOOL On,
- char *mode_name)
- {
- u32 pinSetIdx = 0; /* default main sensor */
- #define IDX_PS_CMRST 0
- #define IDX_PS_CMPDN 4
- #define IDX_PS_MODE 1
- #define IDX_PS_ON 2
- #define IDX_PS_OFF 3
- #define VOL_2800 2800000
- #define VOL_1800 1800000
- #define VOL_1500 1500000
- #define VOL_1200 1200000
- #define VOL_1000 1000000
- u32 pinSet[3][8] = {
- /* for main sensor */
- { /* The reset pin of main sensor uses GPIO10 of mt6306, please call mt6306 API to set */
- CAMERA_CMRST_PIN,
- CAMERA_CMRST_PIN_M_GPIO, /* mode */
- GPIO_OUT_ONE, /* ON state */
- GPIO_OUT_ZERO, /* OFF state */
- CAMERA_CMPDN_PIN,
- CAMERA_CMPDN_PIN_M_GPIO,
- GPIO_OUT_ONE,
- GPIO_OUT_ZERO,
- },
- /* for sub sensor */
- {
- CAMERA_CMRST1_PIN,
- CAMERA_CMRST1_PIN_M_GPIO,
- GPIO_OUT_ONE,
- GPIO_OUT_ZERO,
- CAMERA_CMPDN1_PIN,
- CAMERA_CMPDN1_PIN_M_GPIO,
- GPIO_OUT_ONE,
- GPIO_OUT_ZERO,
- },
- /* for main_2 sensor */
- {
- GPIO_CAMERA_INVALID,
- GPIO_CAMERA_INVALID, /* mode */
- GPIO_OUT_ONE, /* ON state */
- GPIO_OUT_ZERO, /* OFF state */
- GPIO_CAMERA_INVALID,
- GPIO_CAMERA_INVALID,
- GPIO_OUT_ONE,
- GPIO_OUT_ZERO,
- }
- };
- if (DUAL_CAMERA_MAIN_SENSOR == SensorIdx)
- pinSetIdx = 0;
- else if (DUAL_CAMERA_SUB_SENSOR == SensorIdx)
- pinSetIdx = 1;
- else if (DUAL_CAMERA_MAIN_2_SENSOR == SensorIdx)
- pinSetIdx = 2;
- /* power ON */
- if (On) {
- #if 0
- ISP_MCLK1_EN(1);
- ISP_MCLK2_EN(1);
- ISP_MCLK3_EN(1);
- #else
- if (pinSetIdx == 0)
- ISP_MCLK1_EN(1);
- else if (pinSetIdx == 1)
- ISP_MCLK2_EN(1);
- #endif
- printk(��fangkuiccm %d ,currSensorName = %s pinSetIdx = %d ��,LINE,currSensorName,pinSetIdx );
- //ͨ��DriverName������SensorIC
- if (currSensorName && (0 == strcmp(SENSOR_DRVNAME_GC2355_MIPI_RAW, currSensorName))) {
- /* First Power Pin low and Reset Pin Low */
- if (GPIO_CAMERA_INVALID != pinSet[pinSetIdx][IDX_PS_CMPDN])
- mtkcam_gpio_set(pinSetIdx, CAMPDN,
- pinSet[pinSetIdx][IDX_PS_CMPDN + IDX_PS_OFF]);
- if (GPIO_CAMERA_INVALID != pinSet[pinSetIdx][IDX_PS_CMRST])
- mtkcam_gpio_set(pinSetIdx, CAMRST,
- pinSet[pinSetIdx][IDX_PS_CMRST + IDX_PS_OFF]);
- mdelay(50);
- /* VCAM_A */
- if (TRUE != _hwPowerOn(VCAMA, VOL_2800)) {
- PK_DBG
- (��[CAMERA SENSOR] Fail to enable analog power (VCAM_A),power id = %d\n��,
- VCAMA);
- goto _kdCISModulePowerOn_exit;
- }
- mdelay(10);
- / VCAM_IO /
- if (TRUE != hwPowerOn(VCAMIO, VOL_1800)) {
- PK_DBG
- (��[CAMERA SENSOR] Fail to enable IO power (VCAM_IO),power id = %d\n��,
- VCAMIO);
- goto _kdCISModulePowerOn_exit;
- }
- mdelay(10);
- if (TRUE != hwPowerOn(VCAMD, VOL_1500)) {
- PK_DBG
- (��[CAMERA SENSOR] Fail to enable digital power (VCAM_D),power id = %d\n��,
- VCAMD);
- goto _kdCISModulePowerOn_exit;
- }
- mdelay(10);
- / AF_VCC /
- if (TRUE != hwPowerOn(VCAMAF, VOL_2800)) {
- PK_DBG
- (��[CAMERA SENSOR] Fail to enable analog power (VCAM_AF),power id = %d\n��,
- VCAMAF);
- goto _kdCISModulePowerOn_exit;
- }
- mdelay(50);
- if (GPIO_CAMERA_INVALID != pinSet[pinSetIdx][IDX_PS_CMRST]) {
- mtkcam_gpio_set(pinSetIdx, CAMRST,
- pinSet[pinSetIdx][IDX_PS_CMRST + IDX_PS_OFF]);
- mdelay(5);
- mtkcam_gpio_set(pinSetIdx, CAMRST,
- pinSet[pinSetIdx][IDX_PS_CMRST + IDX_PS_ON]);
- }
- mdelay(5);
- / enable active sensor /
- if (GPIO_CAMERA_INVALID != pinSet[pinSetIdx][IDX_PS_CMPDN]) {
- mtkcam_gpio_set(pinSetIdx, CAMPDN,
- pinSet[pinSetIdx][IDX_PS_CMPDN + IDX_PS_ON]);
- mdelay(5);
- mtkcam_gpio_set(pinSetIdx, CAMPDN,
- pinSet[pinSetIdx][IDX_PS_CMPDN + IDX_PS_OFF]);
- }
- mdelay(5);
- }
- }else{ //poweroff
- if (currSensorName //������Ҫ�µ粻Ȼ�����©�磬���ջ�Ӱ���ֻ�����
- && (0 == strcmp(SENSOR_DRVNAME_GC2355_MIPI_RAW, currSensorName))) {
- #if 0
- mt_set_gpio_mode(GPIO_SPI_MOSI_PIN, GPIO_MODE_00);
- mt_set_gpio_dir(GPIO_SPI_MOSI_PIN, GPIO_DIR_OUT);
- mt_set_gpio_out(GPIO_SPI_MOSI_PIN, GPIO_OUT_ONE);
- #endif
- / First Power Pin low and Reset Pin Low /
- if (GPIO_CAMERA_INVALID != pinSet[pinSetIdx][IDX_PS_CMPDN]) {
- if (mt_set_gpio_mode
- (pinSet[pinSetIdx][IDX_PS_CMPDN],
- pinSet[pinSetIdx][IDX_PS_CMPDN + IDX_PS_MODE])) {
- PK_DBG(��[CAMERA LENS] set gpio mode failed!! (CMPDN)\n��);
- }
- if (mt_set_gpio_dir(pinSet[pinSetIdx][IDX_PS_CMPDN], GPIO_DIR_OUT)) {
- PK_DBG(��[CAMERA LENS] set gpio dir failed!! (CMPDN)\n��);
- }
- if (mt_set_gpio_out
- (pinSet[pinSetIdx][IDX_PS_CMPDN],
- pinSet[pinSetIdx][IDX_PS_CMPDN + IDX_PS_OFF])) {
- PK_DBG(��[CAMERA LENS] set gpio failed!! (CMPDN)\n��);
- }
- }
- }
- }
int kdCISModulePowerOn(CAMERA_DUAL_CAMERA_SENSOR_ENUM SensorIdx, char *currSensorName, BOOL On,
char *mode_name)
{
u32 pinSetIdx = 0; /* default main sensor */
define IDX_PS_CMRST 0
define IDX_PS_CMPDN 4
define IDX_PS_MODE 1
define IDX_PS_ON 2
define IDX_PS_OFF 3
define VOL_2800 2800000
define VOL_1800 1800000
define VOL_1500 1500000
define VOL_1200 1200000
define VOL_1000 1000000
u32 pinSet[3][8] = {/* for main sensor */{ /* The reset pin of main sensor uses GPIO10 of mt6306, please call mt6306 API to set */CAMERA_CMRST_PIN,CAMERA_CMRST_PIN_M_GPIO, /* mode */GPIO_OUT_ONE, /* ON state */GPIO_OUT_ZERO, /* OFF state */CAMERA_CMPDN_PIN,CAMERA_CMPDN_PIN_M_GPIO,GPIO_OUT_ONE,GPIO_OUT_ZERO,},/* for sub sensor */{CAMERA_CMRST1_PIN,CAMERA_CMRST1_PIN_M_GPIO,GPIO_OUT_ONE,GPIO_OUT_ZERO,CAMERA_CMPDN1_PIN,CAMERA_CMPDN1_PIN_M_GPIO,GPIO_OUT_ONE,GPIO_OUT_ZERO,},/* for main_2 sensor */{GPIO_CAMERA_INVALID,GPIO_CAMERA_INVALID, /* mode */GPIO_OUT_ONE, /* ON state */GPIO_OUT_ZERO, /* OFF state */GPIO_CAMERA_INVALID,GPIO_CAMERA_INVALID,GPIO_OUT_ONE,GPIO_OUT_ZERO,}
};if (DUAL_CAMERA_MAIN_SENSOR == SensorIdx)pinSetIdx = 0;
else if (DUAL_CAMERA_SUB_SENSOR == SensorIdx)pinSetIdx = 1;
else if (DUAL_CAMERA_MAIN_2_SENSOR == SensorIdx)pinSetIdx = 2;/* power ON */
if (On) {
if 0
ISP_MCLK1_EN(1);ISP_MCLK2_EN(1);ISP_MCLK3_EN(1);
else
if (pinSetIdx == 0)ISP_MCLK1_EN(1);else if (pinSetIdx == 1)ISP_MCLK2_EN(1);
endif
printk("fangkuiccm %d ,currSensorName = %s pinSetIdx = %d ",__LINE__,currSensorName,pinSetIdx );//ͨ��DriverName������SensorIC
if (currSensorName && (0 == strcmp(SENSOR_DRVNAME_GC2355_MIPI_RAW, currSensorName))) {/* First Power Pin low and Reset Pin Low */if (GPIO_CAMERA_INVALID != pinSet[pinSetIdx][IDX_PS_CMPDN])mtkcam_gpio_set(pinSetIdx, CAMPDN,pinSet[pinSetIdx][IDX_PS_CMPDN + IDX_PS_OFF]);if (GPIO_CAMERA_INVALID != pinSet[pinSetIdx][IDX_PS_CMRST])mtkcam_gpio_set(pinSetIdx, CAMRST,pinSet[pinSetIdx][IDX_PS_CMRST + IDX_PS_OFF]);mdelay(50);/* VCAM_A */if (TRUE != _hwPowerOn(VCAMA, VOL_2800)) {PK_DBG("[CAMERA SENSOR] Fail to enable analog power (VCAM_A),power id = %d\n",VCAMA);goto _kdCISModulePowerOn_exit_;}mdelay(10);/* VCAM_IO */if (TRUE != _hwPowerOn(VCAMIO, VOL_1800)) {PK_DBG("[CAMERA SENSOR] Fail to enable IO power (VCAM_IO),power id = %d\n",VCAMIO);goto _kdCISModulePowerOn_exit_;}mdelay(10);if (TRUE != _hwPowerOn(VCAMD, VOL_1500)) {PK_DBG("[CAMERA SENSOR] Fail to enable digital power (VCAM_D),power id = %d\n",VCAMD);goto _kdCISModulePowerOn_exit_;}mdelay(10);/* AF_VCC */if (TRUE != _hwPowerOn(VCAMAF, VOL_2800)) {PK_DBG("[CAMERA SENSOR] Fail to enable analog power (VCAM_AF),power id = %d\n",VCAMAF);goto _kdCISModulePowerOn_exit_;}mdelay(50);if (GPIO_CAMERA_INVALID != pinSet[pinSetIdx][IDX_PS_CMRST]) {mtkcam_gpio_set(pinSetIdx, CAMRST,pinSet[pinSetIdx][IDX_PS_CMRST + IDX_PS_OFF]);mdelay(5);mtkcam_gpio_set(pinSetIdx, CAMRST,pinSet[pinSetIdx][IDX_PS_CMRST + IDX_PS_ON]);}mdelay(5);/* enable active sensor */if (GPIO_CAMERA_INVALID != pinSet[pinSetIdx][IDX_PS_CMPDN]) {mtkcam_gpio_set(pinSetIdx, CAMPDN,pinSet[pinSetIdx][IDX_PS_CMPDN + IDX_PS_ON]);mdelay(5);mtkcam_gpio_set(pinSetIdx, CAMPDN,pinSet[pinSetIdx][IDX_PS_CMPDN + IDX_PS_OFF]);}mdelay(5);}
}else{ //poweroffif (currSensorName //������Ҫ�µ粻Ȼ�����©�磬���ջ�Ӱ���ֻ�����&& (0 == strcmp(SENSOR_DRVNAME_GC2355_MIPI_RAW, currSensorName))) {
if 0
mt_set_gpio_mode(GPIO_SPI_MOSI_PIN, GPIO_MODE_00);mt_set_gpio_dir(GPIO_SPI_MOSI_PIN, GPIO_DIR_OUT);mt_set_gpio_out(GPIO_SPI_MOSI_PIN, GPIO_OUT_ONE);
endif
/* First Power Pin low and Reset Pin Low */if (GPIO_CAMERA_INVALID != pinSet[pinSetIdx][IDX_PS_CMPDN]) {if (mt_set_gpio_mode(pinSet[pinSetIdx][IDX_PS_CMPDN],pinSet[pinSetIdx][IDX_PS_CMPDN + IDX_PS_MODE])) {PK_DBG("[CAMERA LENS] set gpio mode failed!! (CMPDN)\n");}if (mt_set_gpio_dir(pinSet[pinSetIdx][IDX_PS_CMPDN], GPIO_DIR_OUT)) {PK_DBG("[CAMERA LENS] set gpio dir failed!! (CMPDN)\n");}if (mt_set_gpio_out(pinSet[pinSetIdx][IDX_PS_CMPDN],pinSet[pinSetIdx][IDX_PS_CMPDN + IDX_PS_OFF])) {PK_DBG("[CAMERA LENS] set gpio failed!! (CMPDN)\n");}}
}
}�ϵ������ɺ����Ŷ�ȡSensorID��ͨ������ʹ��SensorFeatureControl����ȡID�磺
g_pSensorFunc->SensorFeatureControl(g_invokeSocketIdx[i],
SENSOR_FEATURE_CHECK_SENSOR_ID,
(MUINT8 *) &sensorID,
&retLen);
�ⲽ���������GC2355�е�feature_control�������£�
�ļ���kernel-3.18/drivers/misc/mediatek/imgsensor/src/mt6580/gc2355_mipi_raw/gc2355mipi_Sensor.c
- static kal_uint32 feature_control(MSDK_SENSOR_FEATURE_ENUM feature_id,
- UINT8 *feature_para,UINT32 *feature_para_len)
- {
- ��.
- LOG_INF(��feature_id = %d\n��, feature_id);
- switch (feature_id) {
- ��.
- case SENSOR_FEATURE_CHECK_SENSOR_ID:
- get_imgsensor_id(feature_return_para_32);
- break;
- ��.
- default:
- break;
- }
- return ERROR_NONE;
- }
static kal_uint32 feature_control(MSDK_SENSOR_FEATURE_ENUM feature_id,
UINT8 *feature_para,UINT32 *feature_para_len)
{
��.
LOG_INF(��feature_id = %d\n��, feature_id);
switch (feature_id) {
��.
case SENSOR_FEATURE_CHECK_SENSOR_ID:
get_imgsensor_id(feature_return_para_32);
break;
��.
default:
break;
}return ERROR_NONE;
}
�Ż������cmdΪSENSOR_FEATURE_CHECK_SENSOR_ID��������feature_control�е�
get_imgsensor_id�ٿ�get_imgsensor_id��ʵ��
- static kal_uint32 get_imgsensor_id(UINT32 *sensor_id)
- {
- kal_uint8 i = 0;
- kal_uint8 retry = 2;
- //sensor have two i2c address 0x6c 0x6d & 0x21 0x20, we should detect the module used i2c address
- while (imgsensor_info.i2c_addr_table[i] != 0xff) {
- spin_lock(&imgsensor_drv_lock);
- imgsensor.i2c_write_id = imgsensor_info.i2c_addr_table[i];
- spin_unlock(&imgsensor_drv_lock);
- do {
- *sensor_id = return_sensor_id(); //return_sensor_id��ȡIC��ID
- if (*sensor_id == imgsensor_info.sensor_id) {
- LOG_INF(��i2c write id: 0x%x, sensor id: 0x%x\n��, imgsensor.i2c_write_id,*sensor_id);
- return ERROR_NONE;
- }
- LOG_INF(��Read sensor id fail, write id: 0x%x, id: 0x%x\n��, imgsensor.i2c_write_id,*sensor_id);
- retry�C;
- } while(retry > 0);
- i++;
- retry = 2;
- }
- ��.
- return ERROR_NONE;
- }
static kal_uint32 get_imgsensor_id(UINT32 *sensor_id)
{kal_uint8 i = 0;kal_uint8 retry = 2;//sensor have two i2c address 0x6c 0x6d & 0x21 0x20, we should detect the module used i2c addresswhile (imgsensor_info.i2c_addr_table[i] != 0xff) {spin_lock(&imgsensor_drv_lock);imgsensor.i2c_write_id = imgsensor_info.i2c_addr_table[i];spin_unlock(&imgsensor_drv_lock);do {*sensor_id = return_sensor_id(); //return_sensor_id��ȡIC��IDif (*sensor_id == imgsensor_info.sensor_id) {LOG_INF("i2c write id: 0x%x, sensor id: 0x%x\n", imgsensor.i2c_write_id,*sensor_id);return ERROR_NONE;}LOG_INF("Read sensor id fail, write id: 0x%x, id: 0x%x\n", imgsensor.i2c_write_id,*sensor_id);retry--;} while(retry > 0);i++;retry = 2;}....return ERROR_NONE;
}- static kal_uint32 return_sensor_id(void)
- {
- return ((read_cmos_sensor(0xf0) << 8) | read_cmos_sensor(0xf1));
- }
- static kal_uint16 read_cmos_sensor(kal_uint32 addr)
- {
- kal_uint16 get_byte=0;
- char pu_send_cmd[1] = {(char)(addr & 0xFF) };
- iReadRegI2C(pu_send_cmd, 1, (u8*)&get_byte, 1, imgsensor.i2c_write_id);
- return get_byte;
- }
static kal_uint32 return_sensor_id(void)
{return ((read_cmos_sensor(0xf0) << 8) | read_cmos_sensor(0xf1));
}
static kal_uint16 read_cmos_sensor(kal_uint32 addr)
{kal_uint16 get_byte=0;char pu_send_cmd[1] = {(char)(addr & 0xFF) };iReadRegI2C(pu_send_cmd, 1, (u8*)&get_byte, 1, imgsensor.i2c_write_id);return get_byte;}- int iReadRegI2C(u8 *a_pSendData, u16 a_sizeSendData, u8 *a_pRecvData, u16 a_sizeRecvData,
- u16 i2cId)
- {
- int i4RetValue = 0;
- if (gI2CBusNum == SUPPORT_I2C_BUS_NUM1) {
- spin_lock(&kdsensor_drv_lock);
- g_pstI2Cclient->addr = (i2cId >> 1);
- g_pstI2Cclient->ext_flag = (g_pstI2Cclient->ext_flag) & (~I2C_DMA_FLAG);
- /* Remove i2c ack error log during search sensor */
- /* PK_ERR(��g_pstI2Cclient->ext_flag: %d��, g_IsSearchSensor); */
- if (g_IsSearchSensor == 1) {
- g_pstI2Cclient->ext_flag = (g_pstI2Cclient->ext_flag) | I2C_A_FILTER_MSG;
- } else {
- g_pstI2Cclient->ext_flag = (g_pstI2Cclient->ext_flag) & (~I2C_A_FILTER_MSG);
- }
- spin_unlock(&kdsensor_drv_lock);
- /* */
- i4RetValue = i2c_master_send(g_pstI2Cclient, a_pSendData, a_sizeSendData);
- if (i4RetValue != a_sizeSendData) {
- PK_ERR(��[CAMERA SENSOR] I2C send failed!!, Addr = 0x%x\n��, a_pSendData[0]);
- return -1;
- }
- i4RetValue = i2c_master_recv(g_pstI2Cclient, (char *)a_pRecvData, a_sizeRecvData);
- if (i4RetValue != a_sizeRecvData) {
- PK_ERR(��[CAMERA SENSOR] I2C read failed!!\n��);
- return -1;
- }
- } else {
- spin_lock(&kdsensor_drv_lock);
- g_pstI2Cclient2->addr = (i2cId >> 1);
- /* Remove i2c ack error log during search sensor */
- /* PK_ERR(��g_pstI2Cclient2->ext_flag: %d��, g_IsSearchSensor); */
- if (g_IsSearchSensor == 1) {
- g_pstI2Cclient2->ext_flag = (g_pstI2Cclient2->ext_flag) | I2C_A_FILTER_MSG;
- } else {
- g_pstI2Cclient2->ext_flag = (g_pstI2Cclient2->ext_flag) & (~I2C_A_FILTER_MSG);
- }
- spin_unlock(&kdsensor_drv_lock);
- i4RetValue = i2c_master_send(g_pstI2Cclient2, a_pSendData, a_sizeSendData);
- if (i4RetValue != a_sizeSendData) {
- PK_ERR(��[CAMERA SENSOR] I2C send failed!!, Addr = 0x%x\n��, a_pSendData[0]);
- return -1;
- }
- i4RetValue = i2c_master_recv(g_pstI2Cclient2, (char *)a_pRecvData, a_sizeRecvData);
- if (i4RetValue != a_sizeRecvData) {
- PK_ERR(��[CAMERA SENSOR] I2C read failed!!\n��);
- return -1;
- }
- }
- return 0;
- }
int iReadRegI2C(u8 *a_pSendData, u16 a_sizeSendData, u8 *a_pRecvData, u16 a_sizeRecvData,u16 i2cId)
{int i4RetValue = 0;if (gI2CBusNum == SUPPORT_I2C_BUS_NUM1) {spin_lock(&kdsensor_drv_lock);g_pstI2Cclient->addr = (i2cId >> 1);g_pstI2Cclient->ext_flag = (g_pstI2Cclient->ext_flag) & (~I2C_DMA_FLAG);/* Remove i2c ack error log during search sensor *//* PK_ERR("g_pstI2Cclient->ext_flag: %d", g_IsSearchSensor); */if (g_IsSearchSensor == 1) {g_pstI2Cclient->ext_flag = (g_pstI2Cclient->ext_flag) | I2C_A_FILTER_MSG;} else {g_pstI2Cclient->ext_flag = (g_pstI2Cclient->ext_flag) & (~I2C_A_FILTER_MSG);}spin_unlock(&kdsensor_drv_lock);/* */i4RetValue = i2c_master_send(g_pstI2Cclient, a_pSendData, a_sizeSendData);if (i4RetValue != a_sizeSendData) {PK_ERR("[CAMERA SENSOR] I2C send failed!!, Addr = 0x%x\n", a_pSendData[0]);return -1;}i4RetValue = i2c_master_recv(g_pstI2Cclient, (char *)a_pRecvData, a_sizeRecvData);if (i4RetValue != a_sizeRecvData) {PK_ERR("[CAMERA SENSOR] I2C read failed!!\n");return -1;}} else {spin_lock(&kdsensor_drv_lock);g_pstI2Cclient2->addr = (i2cId >> 1);/* Remove i2c ack error log during search sensor *//* PK_ERR("g_pstI2Cclient2->ext_flag: %d", g_IsSearchSensor); */if (g_IsSearchSensor == 1) {g_pstI2Cclient2->ext_flag = (g_pstI2Cclient2->ext_flag) | I2C_A_FILTER_MSG;} else {g_pstI2Cclient2->ext_flag = (g_pstI2Cclient2->ext_flag) & (~I2C_A_FILTER_MSG);}spin_unlock(&kdsensor_drv_lock);i4RetValue = i2c_master_send(g_pstI2Cclient2, a_pSendData, a_sizeSendData);if (i4RetValue != a_sizeSendData) {PK_ERR("[CAMERA SENSOR] I2C send failed!!, Addr = 0x%x\n", a_pSendData[0]);return -1;}i4RetValue = i2c_master_recv(g_pstI2Cclient2, (char *)a_pRecvData, a_sizeRecvData);if (i4RetValue != a_sizeRecvData) {PK_ERR("[CAMERA SENSOR] I2C read failed!!\n");return -1;}}return 0;
}��һ�����I2c�Ķ�ȡ��Ҳ����˵���I2c������ȷ�������ϵ���ȷ������һ���Ϳ�����ȷ�Ķ�ȡID��
����cameraҲ�ͻ����͵�ͨ�ˡ�
�����ܽ�
ͨ���������������ǿ��Կ�����camera��������ע��ƽ̨��������ע��I2c������Ȼ����Ϊǰ����
ע���ַ��豸����װ�ײ㷽�����ϲ���ʵײ�����ʱ����ʾʹ��setdriver������IC��������ڻ�ȡ��
Ȼ��ʹ��checkisalive��sensorlist�е�IC�����ϵ磬�ϵ���ɾͶ�ȡ�豸ID������Ϊֹ���ϲ�Ӧ����
�ײ������ҽ���ɣ������ž���Ԥ�������գ������ⶼ�Ǿ���IC������ʵ���ˡ�