1. ����
�����������conditional random field��CRF���Ǹ���һ��������������������£��������������������ʷֲ�ģ����
������������������ɷ�ģ�͵���ϵ��
���Կ����������������һ������ͼ��
2. ��������ͼ
��������ͼģ�ͣ��ֳ������Ʒ����������һ��������ͼ��ʾ�����ϸ��ʷֲ���
- �ɶ������ɷ���
�� u , v u,v u,v������ͼG��û�б����ӵĽ�㣬��Ӧ���������Ϊ Y u , Y v Y_u, Y_v Yu?,Yv?. �������Ϊ Y O Y_O YO?.
P ( Y u , Y v �O Y o ) = P ( Y u �O Y O ) P ( Y v �O Y o ) P\left(Y_{u}, Y_{v} | Y_{o}\right)=P\left(Y_{u} | Y_{O}\right) P\left(Y_{v} | Y_{o}\right) P(Yu?,Yv?�OYo?)=P(Yu?�OYO?)P(Yv?�OYo?)
- �ֲ������ɷ���
�� W W W���� v v v�б����ӵ����н�㡣
P ( Y v , Y o �O Y W ) = P ( Y v �O Y W ) P ( Y O �O Y W ) P\left(Y_{v}, Y_{o} | Y_{W}\right)=P\left(Y_{v} | Y_{W}\right) P\left(Y_{O} | Y_{W}\right) P(Yv?,Yo?�OYW?)=P(Yv?�OYW?)P(YO?�OYW?)
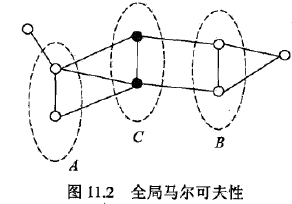
- ȫ�������Ʒ���
���㼯�� A , B A,B A,B��������ͼG�б���㼯�� C C C�ֿ��������㼯�ϡ�
P ( Y A , Y B �O Y C ) = P ( Y A �O Y C ) P ( Y B �O Y C ) P\left(Y_{A}, Y_{B} | Y_{C}\right)=P\left(Y_{A} | Y_{C}\right) P\left(Y_{B} | Y_{C}\right) P(YA?,YB?�OYC?)=P(YA?�OYC?)P(YB?�OYC?)
-
�ţ������������б����ӵĽ���Ӽ���
-
����ţ������ټ�����һ�����ɸ�����š�
-
�ƺ����� �� C ��_C ��C?����
�� c ( Y c ) = exp ? { ? E ( Y c ) } \Psi_{c}\left(Y_{c}\right)=\exp \left\{-E\left(Y_{c}\right)\right\} ��c?(Yc?)=exp{ ?E(Yc?)}
3. ���������CRF
����������Ǹ���������� X �£��������Y�������Ʒ��������
P ( Y v �O X , Y n , w �� v ) = P ( Y v �O X , Y w , w ? v ) P\left(Y_{v} | X, Y_{n}, w \neq v\right)=P\left(Y_{v} | X, Y_{w}, w \sim v\right) P(Yv?�OX,Yn?,w??=v)=P(Yv?�OX,Yw?,w?v)
���У� w ? v w \sim v w?v�������� v v v�б����ӵ����н�� w w w; w �� v w \neq v w??=v������� v v v��������н�㡣
����������ļ���ʽ��
f k ( y i ? 1 , y i , x , i ) = { t k ( y i ? 1 , y i , x , i ) , k = 1 , 2 , ? , K 1 s i ( y i , x , i ) , k = K 1 + l ; l = 1 , 2 , ? , K 2 f_{k}\left(y_{i-1}, y_{i}, x, i\right)=\left\{\begin{array}{ll} t_{k}\left(y_{i-1}, y_{i}, x, i\right), & k=1,2, \cdots, K_{1} \\ s_{i}\left(y_{i}, x, i\right), & k=K_{1}+l ; l=1,2, \cdots, K_{2} \end{array}\right. fk?(yi?1?,yi?,x,i)={ tk?(yi?1?,yi?,x,i),si?(yi?,x,i),?k=1,2,?,K1?k=K1?+l;l=1,2,?,K2??
f k ( y , x ) = �� i = 1 n f k ( y i ? 1 , y i , x , i ) , k = 1 , 2 , ? , K f_{k}(y, x)=\sum_{i=1}^{n} f_{k}\left(y_{i-1}, y_{i}, x, i\right), \quad k=1,2, \cdots, K fk?(y,x)=i=1��n?fk?(yi?1?,yi?,x,i),k=1,2,?,K
P ( y �O x ) = 1 Z ( x ) exp ? �� k = 1 K w k f k ( y , x ) Z ( x ) = �� y exp ? �� k = 1 K w k f k ( y , x ) \begin{aligned} P(y | x) &=\frac{1}{Z(x)} \exp \sum_{k=1}^{K} w_{k} f_{k}(y, x) \\ Z(x) &=\sum_{y} \exp \sum_{k=1}^{K} w_{k} f_{k}(y, x) \end{aligned} P(y�Ox)Z(x)?=Z(x)1?expk=1��K?wk?fk?(y,x)=y��?expk=1��K?wk?fk?(y,x)?
t k t_k tk?����ת�������� s l s_l sl?����״̬������ f k ( y , x ) f_k(y,x) fk?(y,x)�����ڸõ��ȫ�������� w k w_k wk?�������� f k ( y , x ) f_k(y,x) fk?(y,x)��Ȩֵ�� Z ( x ) Z(x) Z(x)�ǹ�һ�����ӡ�
�����������������ʽ��
M i ( x ) = [ M i ( y i ? 1 , y i �O x ) ] M i ( y i ? 1 , y i �O x ) = exp ? ( W i ( y i ? 1 , y i �O x ) ) W i ( y i ? 1 , y i �O x ) = �� k = 1 K w k f k ( y i ? 1 , y i , x , i ) \begin{array}{c} M_{i}(x)=\left[M_{i}\left(y_{i-1}, y_{i} | x\right)\right] \\ M_{i}\left(y_{i-1}, y_{i} | x\right)=\exp \left(W_{i}\left(y_{i-1}, y_{i} | x\right)\right) \\ W_{i}\left(y_{i-1}, y_{i} | x\right)=\sum\limits_{k=1}^{K} w_{k} f_{k}\left(y_{i-1}, y_{i}, x, i\right) \end{array} Mi?(x)=[Mi?(yi?1?,yi?�Ox)]Mi?(yi?1?,yi?�Ox)=exp(Wi?(yi?1?,yi?�Ox))Wi?(yi?1?,yi?�Ox)=k=1��K?wk?fk?(yi?1?,yi?,x,i)?
�������ʣ�
P w ( y �O x ) = 1 Z w ( x ) �� i = 1 n + 1 M i ( y i ? 1 , y i �O x ) P_{w}(y | x)=\frac{1}{Z_{w}(x)} \prod_{i=1}^{n+1} M_{i}\left(y_{i-1}, y_{i} | x\right) Pw?(y�Ox)=Zw?(x)1?i=1��n+1?Mi?(yi?1?,yi?�Ox)
3.1 ���ʼ�������
ǰ��-�����㷨��
1�����ʼ��㣺
�� i T ( y i �O x ) = �� i ? 1 T ( y i ? 1 �O x ) [ M i ( y i ? 1 , y i �O x ) ] , i = 1 , 2 , ? , n + 1 \alpha_{i}^{T}\left(y_{i} | x\right)=\alpha_{i-1}^{T}\left(y_{i-1} | x\right)\left[M_{i}\left(y_{i-1}, y_{i} | x\right)\right], i=1,2, \cdots, n+1 ��iT?(yi?�Ox)=��i?1T?(yi?1?�Ox)[Mi?(yi?1?,yi?�Ox)],i=1,2,?,n+1
�� i ( y i �O x ) = [ M i ( y i , y i + 1 �O x ) ] �� i + 1 ( y i + 1 �O x ) \beta_{i}\left(y_{i} | x\right)=\left[M_{i}\left(y_{i}, y_{i+1} | x\right)\right] \beta_{i+1}\left(y_{i+1} | x\right) ��i?(yi?�Ox)=[Mi?(yi?,yi+1?�Ox)]��i+1?(yi+1?�Ox)
����
�� i T ( x ) = �� i ? 1 T ( x ) M i ( x ) \alpha_{i}^{\mathrm{T}}(x)=\alpha_{i-1}^{\mathrm{T}}(x) M_{i}(x) ��iT?(x)=��i?1T?(x)Mi?(x)
�� i ( x ) = M i + 1 ( x ) �� i + 1 ( x ) \beta_{i}(x)=M_{i+1}(x) \beta_{i+1}(x) ��i?(x)=Mi+1?(x)��i+1?(x)
��ˣ��������ʣ�
P ( Y i = y i �O x ) = �� i ? ( y i �O x ) �� i ( y i �O x ) Z ( x ) \begin{array}{c} P\left(Y_{i}=y_{i} | x\right)=\frac{\alpha_{i}^{\top}\left(y_{i} | x\right) \beta_{i}\left(y_{i} | x\right)}{Z(x)} \end{array} P(Yi?=yi?�Ox)=Z(x)��i??(yi?�Ox)��i?(yi?�Ox)??
P ( Y i ? 1 = y i ? 1 , Y i = y i �O x ) = �� i ? 1 T ( y i ? 1 �O x ) M i ( y i ? 1 , y i �O x ) �� i ( y i �O x ) Z ( x ) \begin{array}{c} P\left(Y_{i-1}=y_{i-1}, Y_{i}=y_{i} | x\right)=\frac{\alpha_{i-1}^{\mathrm{T}}\left(y_{i-1} | x\right) M_{i}\left(y_{i-1}, y_{i} | x\right) \beta_{i}\left(y_{i} | x\right)}{Z(x)} \end{array} P(Yi?1?=yi?1?,Yi?=yi?�Ox)=Z(x)��i?1T?(yi?1?�Ox)Mi?(yi?1?,yi?�Ox)��i?(yi?�Ox)??
3.2 �����������ѧϰ�㷨
�Ľ��ĵ����߶ȷ�
��ţ�ٷ�
3.3 �����������Ԥ���㷨
�������������P(Y|X)������������x�����������������������y��
���
1�����������_����ƽ
2��IIS�㷨