Graph Cut and Its Application in Computer Vision
ԭ�ij�����
http://lincccc.blogspot.tw/2011/04/graph-cut-and-its-application-in.html
�������㷨������ڽ����������Ż����⣬����ˮ�����硢ͨ�Ŵ���ͳ��еij����ȡ�Graph cut��Ϊ����һ��������㷨������������������С���Ѱ��һ����������С�ı��ϣ�ȥ����������е����б߽����������硣ͼ�����ƵҲ�ܱ��������磨����MRF������������Ϊ�ڵ㣬����Ӧ�ö����������ؼ�ߵ�����ֵ������������˴Ӿ�ʮ���ĩ��ʼ��Graph cut���������������Ӿ���ͼ�����ͻ���ѧϰ���������Ż����ࡢ�ָ�ͺϳɵ����⡣
The Max-Flow and Min-Cost Problem��
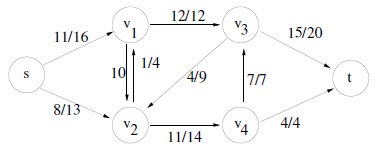
����ͼ�����������磩G = (V, E)������Ϊ����ͼ������ͼ��ͼ�����еı� e(u, v) �� E ����һ���Ǹ������� c(u, v) �� 0�����ñ����ܳ��ܵ����������ͼ��ͨ��������������Ľڵ㣬Դ�� s ���յ� t������ӵ�ж���˵��ͼ�������Max-flow���ΪNP���⣬��Ҫת��Ϊ˫�˵����������Ž⡣������������������ f : VXV �� R Ϊͼ G �ϵ�����
�� Capacity Constrain���������� u, v �� V��f(u, v) �� c(u, v)
�� Skew Symmetry���������� u, v �� V��f(u, v) = ��f(u, v)
�� Flow Conservation���������� u �� V��{s, t} �� v �� V���� f(u, v) = 0
�� s �����������������ܺ;�������ͼ��������������ͼ��ʾ��ͼ�ĵ�ǰ������Ϊ19��û�дﵽ���ֵ��
Cut���������ͼ�����нڵ��Ϊ�������ཻ�ļ��� S �� T������s �� S��t �� T�������������Ϊ��
c(S, T) = ��x��S ��y��T c(x, y)��
Min-cut����С�����ͼ�����и���������С��һ�����㷨��Ҫֱ����Min-cut��ʮ�����ѵģ������������С�������ͼ�������������ͼ����С��������ͨ��Ҫ������ת��Ϊ��֮�ȼ۵�Max-flow���⣨�����Ƶ����ң���
Max-Flow and Min-Cost Algorithms��
Max-flow�������������ྭ����㷨������·��[1] ��Push-relabel [2]������·�����㷨��ѭѭ����ԭ������ͼ�ϲ��Ҵ� s �� t �Ŀ���·������0��ʼ����������ͼ�������������Push-relabel���㷨��Ӿֲ����������Ǿ����ܵ���ͼ����������������ڲ����ظ���Push��Relabel�����дﵽ�ڵ���ƽ�⣬��ˮ����һ����̬��Push-relabel���㷨���нϸߵIJ����ԣ�������GPU���٣��������̵��ҡ�
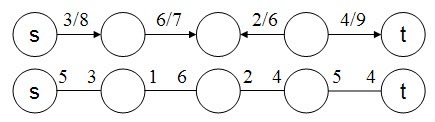
����·�����㷨�кܶ����������������������ԣ�1��ά�������������磻2��ͨ��Ѱ��Augmenting path�ƽ��������Augmenting path������ʽ��s, e1, v1, e2, v2, �� , ek, t������û���ظ��Ľڵ㡢û�б��͵�ǰ��ߺͿ������ĺ���ߡ��Բ�������Ķ����кܶ���ʽ���������Ƕ���ߵIJ���������Redsidual capacity��RC������Ϊǰ���ʱ���� c(i, j) �C f(i, j)������Ϊ�����ʱ���� f(i, j)������ͼ��ʾ��
Augmenting path�IJ�������Ϊ��ÿ���߲�����������Сֵ������ͼ·���IJ�������Ϊ1��Ford-Fulkerson�㷨�����ڲ��������в�ѯAugmenting path������ʹ�ù�Ȼ��������������ֱ����Ҳ�Ҳ����κ�·�������ӵ��ҡ�Boykov[3] ���һ��˫������������������������·���㷨����Ȼ���۸��ӶȽϸߣ�����ʵ��Ӧ����ȴЧ�ʽϸߣ���˺ܶ���ҪGraph cut��Ӧ�ö�����Boykov�ṩ��Դ���롣
Applications in Computer Vision��
������Ӿ��кܶ����⣬�����Թ��Ϊ�������̵��Ż����⡣����ͼ��ָ�����⣬����ÿһ����������ǰ�����Ŀ����Զ���������������ͱ���������������������������ȡֵ�������⡣��Ȼ��ʱ�����ǻ���Ҫ����ƽ�������Լ���������ص����Ա仯������γ������Ӿ�����Ϊ������һ�������Ż����̣�
E(f) = Esmooth(f) + Edata(f)
1άͼ�����ö�̬�滮������⣬��2ά���������伸�μ��ĸ��Ӷ�����������ʹ��Graph cut�����͵�Ӧ����Segmentation��Stereo matching��Image Restoration��Motion estimation�ȡ����ݲ�ͬ��Ӧ���в�ͬ��ͼ��������Լ��������������Kolmogorov[4] �о���ʲô����������������Graph cut�Ż������������Ԫ���������������Զ�ת����ͼ�ķ�����
Multi-label Graph Cut��
����Ӧ�õ���Ҫ����ʱ�����ͼ���Ƕ��label�ģ�Ҳ�����ж����㣬����ͼ��ʾ������ͼ��Min-cut��Multi-way�ģ���������һ��NP���⣨Boykov[3]����������������ϸ֤����������Stereo matching�е�disparity��Image Restoration�е�intensity�ȣ��䱾�ʶ���һ��Multi-label���Ż����⡣��Ȼ��Щ�������Խ�����Ϊ��ת��Ϊ2-label�������ںܴ�̶������������������Ķ��塣
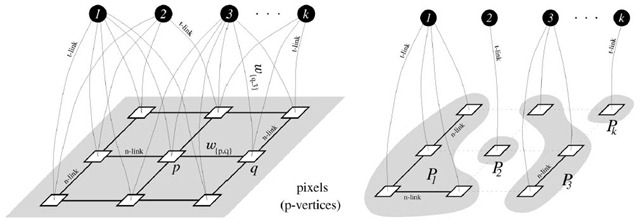
Boykov[3]����������㷨���ܹ��ڶ���ʽʱ���ڱƽ�Muli-label��������Ž⣬����������ϸ֤���������㷨��optimality property���ۡ�����һƪֵ��ϸ�������¡������ַ���������Ѱ��Local minima������ʹ��ͼ�е�����һ�����ظı���label�����ܲ������õĽ⡣��ÿһ�ε����У����ַ����ֱ���� ��-expansion �� ��-��-swap ��ʽ��move �Ż�����-expansion move ��ָ��չ ��-label ����ʹԭ������ label �ĵ����� ������-��-swap move ��ֻ��� ��-label �� ��-label ����ʹ���е�һЩ���label�� �� ��Ϊ �� ���෴��ÿһ����������һ��2-label���Ż����̣��γ��� �� �� �Ǧ� Ϊ��㡢�Լ��� �� �� �� Ϊ����ͼ��Ѱ������cut������label�����ϱƽ����Ž⡣��-expansion Ҫ��ƽ�����������߶������� ��-��-swap ����������ƽ����壻�� ��-expansion ���ϸ��optimality property bound���ܲ������̫���Ľ������˱��϶��ʹ�á�
Dynamic Graph Cut��
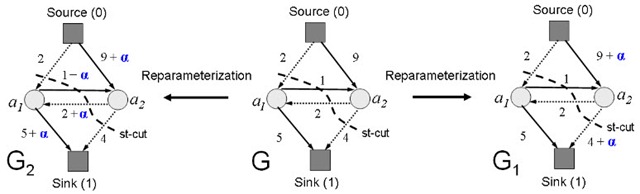
��̬ͼָһ��ͼ���У���ʱ����ǰ��ͼֱ�ӻᱣ��ƽ���Ĺ��ɣ���ˣ��Ƿ������ǰһ��ͼ��residual graph�������ı仯�˵����ص�������Կ��ٵ���⣿Dynamic graph cut����Ѱ�����Ž⣬���Ǵ��ŵĿ��ٵĽ⡣Kohli[12] ʹ�����²�����ͼ��Graph Reparameterization���ķ����Ķ�̬�仯����ֵ��������Capacity��Flow�Ȼ���Լ��������ֱ�ӵõ����Ž⡣���ַ����������������ߵ��ĺ���������ڵ����˵��ع������Ǻ���������Dynamic graph cut�㷨һ������������Ҳ��������ʱ��仯Ϊǰ�ᡣ��ҪӦ������Ƶ��ص��Ӿ���������Video segmentation��
Bibliography��
[1] L. Ford , D. Fulkerson. Flows in Networks. Princeton University Press, 1962.
[2] Andrew V. Goldberg, Robert E. Tarjan. A new approach to the maximum-flow problem. In Journal of the Association for Computing Machinery, 35(4):921�C940, October 1988.
[3] Y. Boykov, V. Kolmogorov. An Experimental Comparison of Min-Cut/Max-Flow Algorithms for Energy Minimization in Vision. In IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), volume 26, page 1124-1137, 2004.
[4] V. Kolmogorov, R. Zabih. What Energy Functions Can Be Minimized via Graph Cuts? In IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), volume 26, no.2, page 147-159, 2004.
[5] V. Kolmogorov, R. Zabih. Multi-camera Scene Reconstruction via Graph Cuts. In European Conference on Computer Vision (ECCV), May 2002 (best paper).
[6] Y. Boykov, O. Veksler and R. Zabih. Faster approximate energy minimization via graph cuts. In IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), volume 23, no. 11, page 1-18, 2001.
[7] S. Roy, I. Cox. A maximum-flow formulation of the n-camera stereo correspondence problem. In International Conference on Computer Vision (ICCV), 1998.
[8] V. Vineet, P. J. Narayanan. CUDA Cuts: Fast Graph Cuts on the GPU. In: CVPR Workshop on Visual Computer Vision on GPUs, 2008.
[9] V. Kwatra, A. Schodl, I. Essa, G. Turk and A. Bobick. Graphcut Textures: Image and Video Synthesis Using Graph Cuts. In SIGGRAPH 2003, pp. 277-286.
[10] A. Blum, J. Lafferty, M.R. Rwebangira and R. Reddy. Semi-Supervised Learning Using Randomized Mincuts. In Proceedings of the 21st International Conference on Machine Learning (ICML), Banff, Canada 2004.
[11] S. Z. Li, Markov Random Field Modeling in Computer Vision, Springer Verlag, 1995.
[12] P. Kohli and P. H. S. Torr. Dynamic graph cuts for efficient inference in markov random fields. IEEE Trans. Pattern Anal. Mach. Intell. (PAMI), 29(12):2079�C2088, 2007.