ǰ��
���IJο����ϣ�rviz - ROS ά��![]() http://wiki.ros.org/rvizGazebo : Tutorial : Ubuntu (gazebosim.org)
http://wiki.ros.org/rvizGazebo : Tutorial : Ubuntu (gazebosim.org)![]() http://gazebosim.org/tutorials?tut=install_ubuntu&cat=install����ʵ���� (meshlab.net)
http://gazebosim.org/tutorials?tut=install_ubuntu&cat=install����ʵ���� (meshlab.net)![]() https://www.meshlab.net/
https://www.meshlab.net/
ʲô��Rviz��Gazebo��
Rviz��һ����ά���ӻ����ߣ����������е����ݽ����ݿ��ӻ������ṩ�˿�����ʾͼ��ģ�͡�����·������Ϣ�IJ�������ǿ���������Щ�����Ϊֱ�۵��������ݡ�����Щ������е�ǰ���ǣ�Rviz�Ѿ����������Ҫ�����ݣ�Ȼ������ݽ��д�������ɿ��ӻ�����Ⱦ��
Gazebo��һ����ά��������ƽ̨�����ǿ�����gazebo����Ѵ���һ��ģ��Ļ��������磬�������Է�������˵��˶����ܣ������Է�������˵Ĵ��������ݡ�����Щ���ݾͿ��Էŵ�rviz����ʾ������ʹ��gazebo��ʱ����Ҳ���rviz���ʹ�á�������Ƶ�ģ�������Կ��ٲ����㷨����ƻ����ˣ�ִ�лع���ԣ���ʹ����ʵ����ѵ��AIϵͳ��Gazebo�ṩ���ڸ��ӵ����ں��������ȷ��Ч��ģ���������Ⱥ��������ǿ����������桢��������ͼ���Լ�����ij���ͼ�ν��津�ֿɼ�������������û�л�����Ӳ����ʵ�黷�����Դʱ�����������Ƿdz����õ�������
���ϣ�����������Ѿ��л�����Ӳ��ƽ̨���������ϱ߿��������Ҫ�Ĺ��ܣ���rvizӦ�þͿ������㿪���������������û�л�����Ӳ�����������ڷ��滷������һЩ�㷨��Ӧ�õIJ��ԣ�gazebo+rvizӦ��������Ҫ�ġ�
ʲô��Meshlab:
Meshlab��һ��鿴���Ƶ����������ɴ���.plyΪ�����ļ���
һ��Rviz��Gazebo�İ�װ
1.Rviz�İ�װ
�������װROSʱѡ��װ������������棬��ô�ڰ�װROSʱRviz�Ѿ����Ű�װ���ˣ����û�а�װ����������ķ�����װRviz��
sudo apt-get install ros-noetic-rviz����ROS��
roscoreû����һ��ֱ�ӽ�����һ���ᱨ����
���µ�Ubuntu�ն����룺
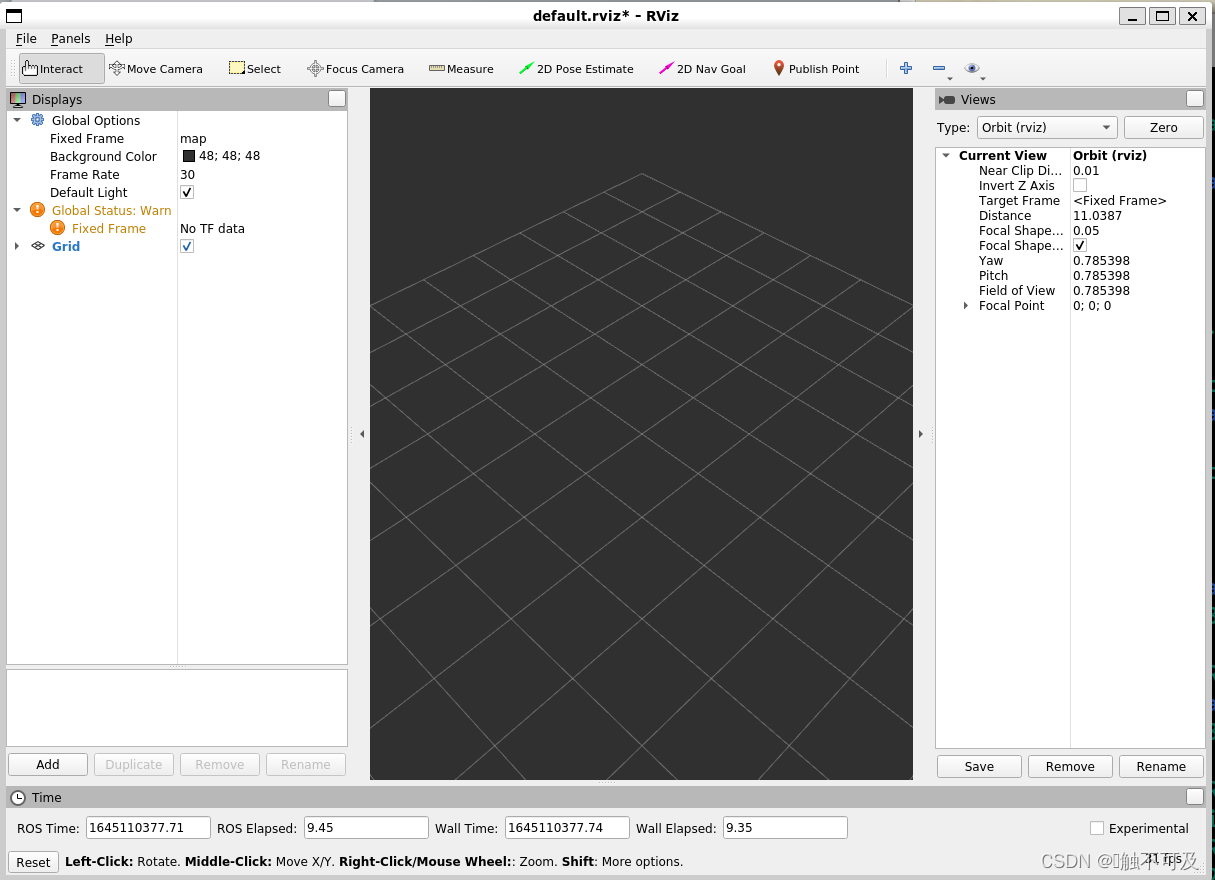
rviz�Ϳ��Դ�����Ļ��棺
�������Rviz����ʾ�����ֺ���������ʾ������ͼ��Ϣ������취��
1���ر�Rviz��
2�����ն����룺
export LIBGL_ALWAYS_SOFTWARE=1����ע��LIBGL_ALWAYS_SOFTWARE=1��ǿ��ʹ��������Ⱦ����
3�����´�Rviz
�� �м䲿��Ϊ 3D��ͼ��ʾ�����ܹ���ʾ�ⲿ��Ϣ��
�� �ϲ�Ϊ�������������ӽǿ��ơ�Ŀ�����á��ص㷢���ȣ������������Զ����һЩ�����
�� ���Ϊ��ʾ��Ŀ����ʾ��ǰѡ��IJ���������ܹ��Բ�������Խ������á�
�� �²�Ϊʱ����ʾ������ϵͳʱ���ROSʱ��ȡ�
�� �Ҳ�Ϊ�۲��ӽ��������������ò�ͬ�Ĺ۲��ӽǡ�
�����Rvizʹ�÷����ɲο���rviz/UserGuide - ROS Wikihttp://wiki.ros.org/rviz/UserGuide
2.Gazebo�İ�װ��
Ubuntu��ROS��Gazebo���汾�Ƽ���Ӧ��ϵ���£�
Ubuntu 14.04 - ROS Indigo - Gazebo 2.X Ubuntu 16.04 - ROS Kinetic - Gazebo 7.X Ubuntu 18.04 - ROS Melodic - Gazebo 9.X Ubuntu 20.04 - ROS Noetic - Gazebo 11.X
�������ǰ�װ��Ӧ��gazebo11��
1.������������������� packages.osrfoundation.org ��������
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'2.��װ����
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -3.��װgazebo:
���ȸ��� debian ���ݿ⣺
sudo apt-get update��ʾ��ȷ�� apt-get ���¹��̽���û���κδ�����̨����Ľ�β������ʾ��
$ sudo apt-get update
...
Hit http://ppa.launchpad.net bionic/main Translation-en
Ign http://us.archive.ubuntu.com bionic/main Translation-en_US
Ign http://us.archive.ubuntu.com bionic/multiverse Translation-en_US
Ign http://us.archive.ubuntu.com bionic/restricted Translation-en_US
Ign http://us.archive.ubuntu.com bionic/universe Translation-en_US
Reading package lists... Done������ͨ�����·�ʽ��װGazebo:
sudo apt-get install gazebo11
sudo apt-get install libgazebo11-dev����������´���
$ sudo apt-get install gazebo11
Reading package lists... Done
Building dependency tree
Reading state information... Done
E: Unable to locate package gazebo11��Ҫ���ҵ� Gazebo �汾��������ʹ�õIJ���ϵͳ�汾�ϲ���֧�֡����磬�� Ubuntu Xenial ��16.04�� �ϰ�װ gazebo11 ����������������ʾ������ Gazebo![]() http://gazebosim.org/#status ��"��Ŀ״̬"���֣�ÿ���汾�Ա߶���֧�ֵ�ubuntu�汾��ROS�汾��
http://gazebosim.org/#status ��"��Ŀ״̬"���֣�ÿ���汾�Ա߶���֧�ֵ�ubuntu�汾��ROS�汾��
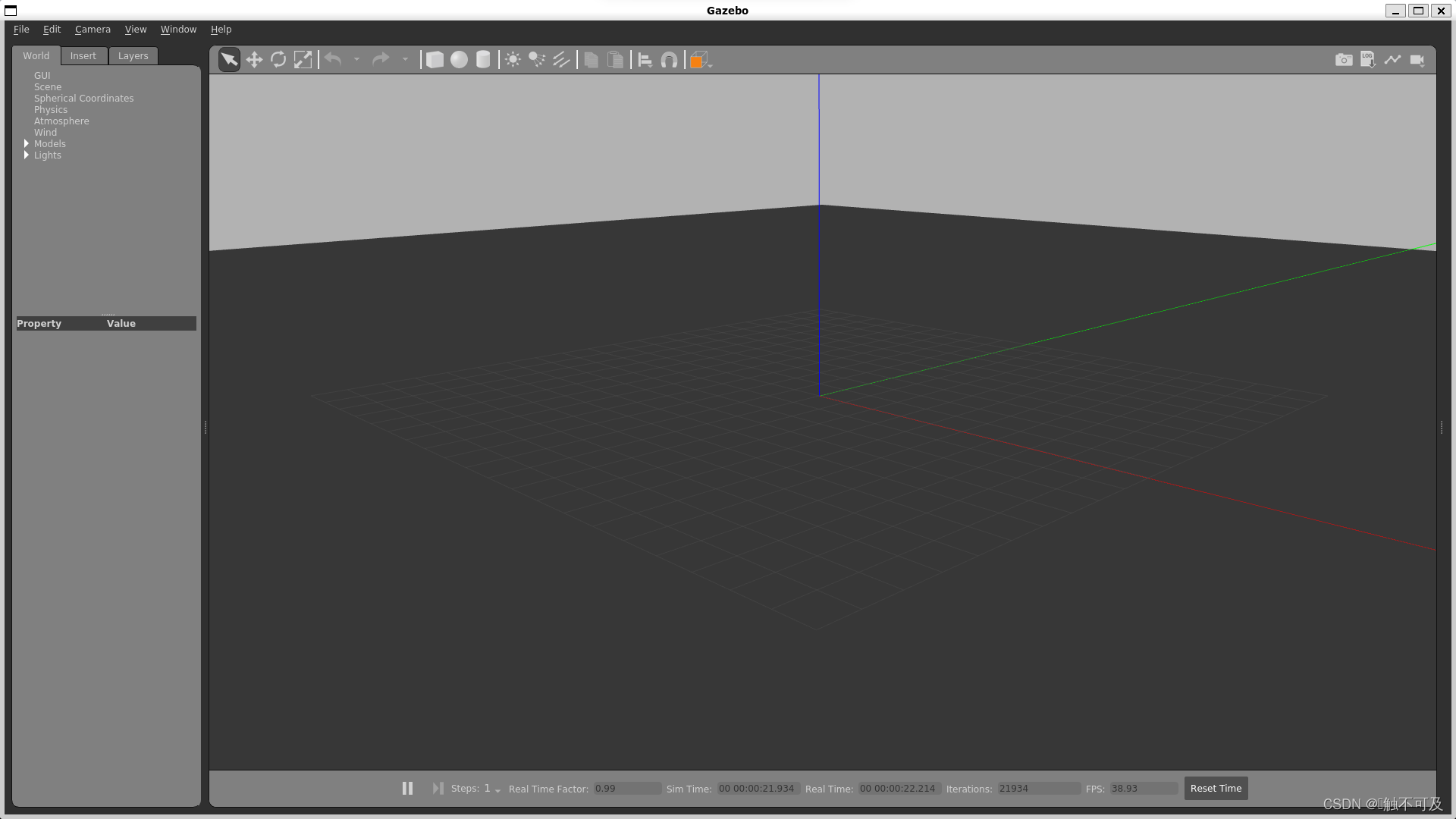
�ն�����gazebo��������ҳ�棬��װ�ɹ���
����Meshlab�İ�װ��
sudo apt-get install meshlab�ն�����meshlab�ɴ�����ҳ�棺
