1 图像采集说明
算力、模型和数据是人工智能的三个要素。当一个算法模型设计好后,就需要大量标注好的数据去训练机器,从而使得机器更加“智能”,得以在实际应用场景中施展拳脚。若希望算法进一步提升性能,则需要更多精细化的数据加以训练,不断迭代。可以说,AI的发展,数据是基础,也是关键。
1.1图像质量
根据从目标图像中提取的自然特征来检测图像目标,然后将其与实时摄像机图像中的特征进行比较。尽管评级较低的目标图形通常可以很好地检测和跟踪。为了获得最佳效果,要尽可能的使用以下图像:
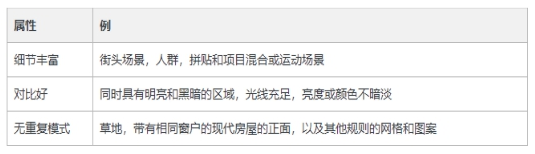
表1-1 优质图像属性表
1.2 相机自动对焦
如果目标在相机视图中没有很好地聚焦,则相机图像结果可能会模糊并且目标细节可能难以检测。结果,检测和跟踪性能可能受到负面影响。
建议使用适当的“相机对焦模式”以确保最佳的相机对焦条件。
请尝试连续自动对焦模式(FOCUS_MODE_CONTINUOUS_AUTO),因为它可以让您的设备随着视图的变化自动调整焦点。
1.3 图像采集的维度
首先要考虑到实际的应用场景,在实际的应用场景下来考虑。如:转辙机考核场景的拍摄角度,考官与转辙机的相对位置和视线夹角需在一定的合理范围内(角度30°~ 60°,距离60cm ~ 150cm)。从仿生学的角度思考问题。
图像像素:图像像素越大,保存的图片信息越多。但过大的图像会给模型训练和数据带来很多问题,如:增加模型的训练成本、提高图像采集和部署的硬件成本、降低检测和识别的实时性等。暂时使用480p、720P和1080P的图像进行验证。
以下是采集图像时应该考虑的维度或因素:

表1-2图像采集维度说明表
2 图像采集案例
从仿生学的角度思考问题,以人的视角来采集图片,以人的认知来识别物体。
2.1 图像采集
采集什么样的数据,就意味着我们的模型有可能学到什么特征。我们喂给模型的数据就是我们需要检测目标的场景
2.1 角度变化原则的原则
从仿生学的角度思考问题,以人的视角来采集图片。图片采集的角度要贴合实际需求,并结合相应的场景做出调整。
一般的图像采集要求为:多角度,全方位的采集图片。如图2所示,以人的视角来考量采集图像时摄像机的角度、距离,以及摄像机本身的高度。这里距离转辙机距离设定为(0.8到1.5M)。图3摄像头的高度范围(1.5~1.8M)摄像头的倾斜角度随距离和高度进行调整,保证转折机始终在图像的中心位置。

2.2 转折机图像采集

识别道岔转折机的各个部件,需要识别的部件图:

相机高度与距离尝试,相机角度对准转折机的中间位置
数据集迭代过程表

小数据集的情况下,想要达到比较好的识别效果,需要根据使用场景,对数据集进行不断修正。标记好的数据,再使用前最好多检查几遍。
项目需求不同,对样本要求也会不同,合理的根据项目需求,采集合适的数据,标定出合适的样本。过度的追求泛化效果,会造成不必要的浪费。