从大的方面来说,Android系统的启动可以分为两个部分:第一部分是Linux核心的启动,第二部分是Android系统的启动。第一部分主要包括系统引导,核心和驱动程序等,由于它们不属于本篇要讲的内容,这里就不再讨论。在本篇博客中,我们重点讲解Android系统的启动,这一过程主要经过两个阶段,分别是应用的初始化流程与system_service进程及核心服务的创建流程。
1.初始化流程
初始化流程,顾名思义,它完成Android的一些初始化工作,包括设置必要的环境变量,启动必要的服务进程,挂载必要的设备等,而这些工作将会为整个Android打下坚实的基础。
①应用的初始化流程
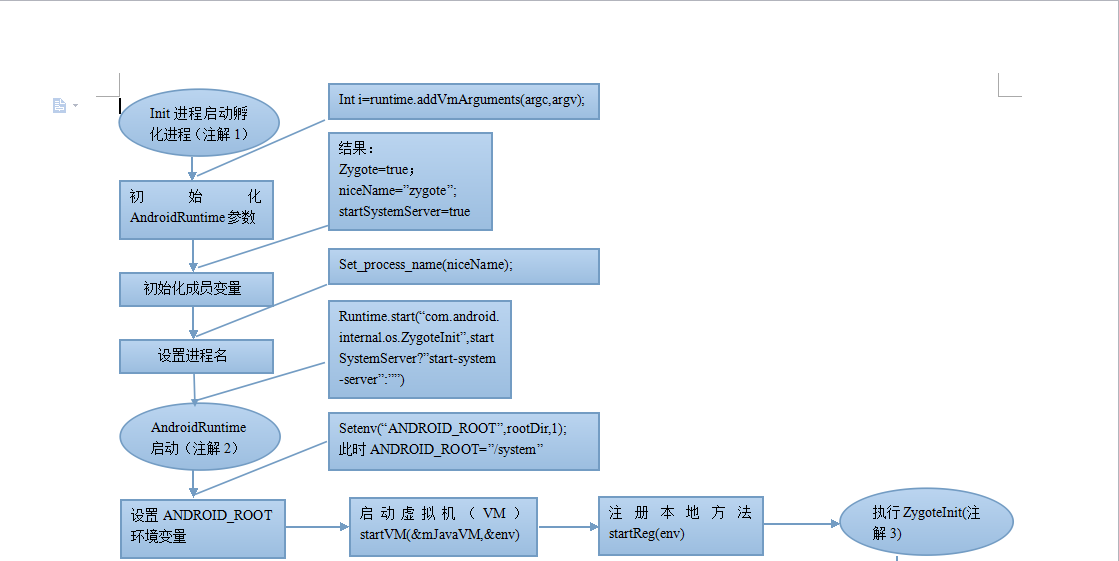
在核心启动完成以后,将进入Android文件系统及应用的初始化流程,此时将会转向执行init.c中的main()函数(路径:/system/core/init/init.c),该函数的执行流程如下图所示:
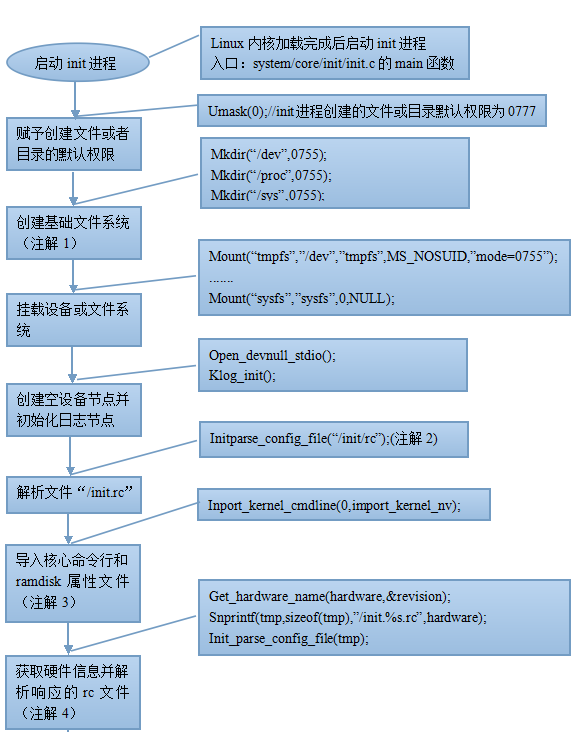
下面我们了解一下上图中的注解
注解1:/dev表示设备文件系统或者udev挂载点,/proc用来挂载存放系统过程性信息的虚拟文件系统,/sys用于挂载“sysfs文件系统”。由于前面调用了umask(0),因此mkdir(“/dev”,0755)得到的权限应该是0755.
注解2:init.rc的解析结果是形成action_list(on关键字相关的部分),service_list(service_关键字相关的部分)以及action_queue(需要执行的命令或服务),以便后续流程使用。
注解3:解析/proc/cmdline文件,将其中的属性导入Android系统全局变量。
注解4:
Ⅰget_hardware_name()方法用于解析/proc/cpuinfo文件获取硬件信息,并用于拼接成一个init.<hardware_name>.rc文件,继续解析。
Ⅱ在解析init.rc文件的过程中,系统会根据该文件的内容形成一些需要命令,动作或者触发器的列表并将这些存入在内在中,以便在必要的时候使用。不同的厂商可能根据不同的硬件需求定制不同的.rc文件,这些.rc文件的名称一般为“init.<hardware_name>.rc”,而解析这些.rc文件的结果同样也会形成一些命令,动作或者触发器的列表,而这些列表将会合并解析init.rc所得的命令和动作的列表中,并且形成最终需要执行的命令和动作。
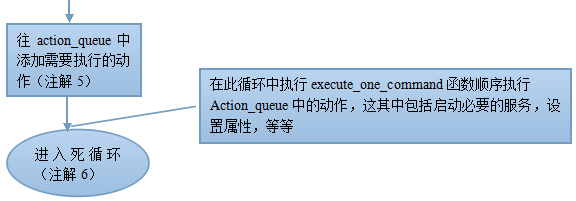
注解5:添加顺序为:early-init下的所有动作,wait_for_coldboot_done_action,property_init_action,keychord_init_action,console_init_action,set_init_properties_action,init下的动作,property_service_init_action,signal_init_action,check_startup_action,early-boot下的所有动作,boot下的所有动作,queue_property_triggers_action。这些动作组成了开机过程中看到的设备的状态,比如开机动画等。
注解6:这里会启动执行设置属性,创建或挂载动作以及启动服务等操作。需要注意是的这里启动的服务包括最重要的servicemanager和zygote服务进程。
至此,init进程进入死循环中处理一些消息以等待命令的到来。在这个过程中,我们将要了解以下知识。
Ⅰ在init运行的过程中产生了许多服务,它们是整个Android的基础,分别是ueventd,console,adbd,servicemanager,vold,netd,debuggerd,ril-daemon,surfaceflinger,zygote,drm,media,bootanim,dbus,bluetoothd,installd,flash_recovery,racoon,mtpd,keystore和dumstate。
Ⅱ整个init的行为甚至整个Android核心的属性都受到启动脚本init.rc的影响。
下面我们就重点介绍zygote的启动行为,详细了解init.rc的语法。
②init.rc的用法
Android初始化语言由声明的4个类型组成,它们分别是动作(action),命令(command),服务(service),和选项(option),以#开头的行表示注释。动作和服务声明新的一节并且有唯一的名字,所有的命令或者选项属于最近声明的节。如果下一个动作或者服务的名字已存在(也就是重名),则它将作为错误被忽略。
Ⅰ动作
动作是命令序列,它有一个触发器,用于确定行动应在何时发生。当发生某一个事件时,它可以匹配到一个动作触发器,并且该动作会被添加到要执行队列的尾部(除非它已经在队列中了)。
队列中的每个动作是按顺序出列的,具体如下所示:
on early-init
write /proc/1/oom-adj -16
setcon u:r:init:s0
start ueventd
动作表现为以下的形式:
on <trigger>
<command>
<command>
<command>
.........
触发器是一些字符串,这些字符串可用于匹配一定类型的事件,并且用于触发动作。下表罗列了一些触发器的定义。
| 触发器 | 说明 |
| boot | 当初始化流程触发的时候,boot是首先被触发的动作(在完成/init.conf文件加载之后) |
| <name>=<value> | 当以<name>命名的属性被设为特定的值<value>时,该触发器发生 |
| device-added-<path> | 当添加设备节点时,device-added-<path>定义的触发器运行 |
| device-removed-<path> | 当移除设备节点时,device-removed-<path>定义的触发器运行 |
| service-exited-<name> | 当指定的服务退出时,service-exited-<name>类型的触发器运行 |
| <string> | 自定义的触发器,可由init代码负责管理 |
Ⅱ命令
命令是组成动作的成员,也就是说,动作由一个个命令组成。下表罗列了动作支持的命令。
| 命令 | 说明 |
| exec <path> [<argument>]* | fork并执行程序(<path>)。这在程序完成执行之前将阻塞一切进程,因此最好避免使用exec命令。该命令中两个参数的含义如下所示。 ?<path>:可执行文件的路径 ?[<argument>]*:可执行文件所需的参数,参数个数可以是0或者多个 |
| export <name> <value> | 设置名字为<name>的环境变量为<value> |
| ifup <interface> | 打开网络接口<interface> |
| import <filename> | 解析一个初始化配置文件,导入系统中 |
| hostname <name> | 设置主机名 |
| chdir <directory> | 修改工作目录,它的功能和cd命令一样 |
| chmod <octal-mode> <path> | 修改文件的访问权限 |
| chown <owner> <group> <path> | 修改<path>指定的问题的所有者和组 |
| chroot <directory> | 修改进程根目录为<directory> |
| class_start <serviceclass> | 启动<serviceclass>类别的服务,如果它们没有运行的话 |
| class_stio <serviceclass> | 停止<serviceclass>类别的服务,如果它们已经处于运行状态的话 |
| domainname <name> | 设置域名 |
| insmod <path> | 在<path>上安装模块 |
| mkdir <path> [mode] [owner] [group] | 创建一个目录,其中目录路径以及名称由<path>指明。这里可以通过参数给定目录的模式,所有者和组。如果没有提供[mode] [owner] [group],则用权限755来创建目录,并且它属于root用户root组 |
| mount <type> <device> <dir> [<mountoption>]* | 尝试在目录<dir>上挂载被命名的设备,<device>[email protected],以便指定名为mtd块的设备。<mountoption>包括ro,rw,remount和noatime等 |
| setkey | TBD |
| setprop <name> <value> | 设置系统属性<name> 为<value> |
| setrlimit <resource> <cur> <max> | 设置指定资源的使用限制 |
| start <service> | 启动指定的服务,如果服务还没有运行的话 |
| stop <service> | 停止指定的服务,如果服务目前正在运行的话 |
| symlink <target> <path> | 用值<target>来在<path>上创建一个符号链接 |
| sysclktz <mins_west_of_gmt> | 设置系统闹钟基准(如果系统闹钟为GMT,则为0) |
| trigger <event> | 触发一个事件。用于执行该触发器中的操作 |
| write <path> <string> [<string>]* | 在<path>上打开文件并且用write(2)来将一个或多个字符串写到文件上。 |
在init.rc中,Android 定义了若干动作,并且这些动作用于完成Android的初始化工作。下面以其中一个动作的配置来说明一下:
on fs
mount yaffs2 [email protected] /system
mount yaffs2 [email protected] /system ro remount
mount yaffs2 [email protected] /data nosuid nodev
mount yaffs2 [email protected] /cache nosuid nodev
这个例子配置了一个触发器为fs的动作,它由4条命令组成,这4条命令都使用mount命令挂载设备。
Ⅲ服务
服务是一些程序,当它们退出的时候,init启动并且(选择性地)重新启动。服务表现为以下形式:
service <name> <pathname> [<argument>]*
<option>
<option>
...........
其中各个参数的含义如下所示:
?<name>:为服务指定一个名字。
?<pathname>:指定服务需要执行的文件路径。
?[<argument>]*:启动服务所需要的参数,参数个数可以是0个或者多个。
Ⅳ选项
选项是服务的修改器,可以影响如何以及何时初始化运行服务。下表罗列了选项列表。
| 选项 | 说明 |
| critical | 这是一个对于设备来说比较关键的服务,如果它在4分钟内退出超过4次,那么设备将重新启动并进入recovery模式。 |
| disabled | 这个服务不能通过类别自动启动,它必须通过服务名字来显示启动 |
| setenv <name> <value> | 设置启动进程中环境变量(由<name>指定)的值为<value> |
| socket <name> <type> <perm> [<user> [<group>]] | 创建名为/dev/socket/<name>的一个Unix域端口并且将它的fd传递到被启动的进程上 <type>必须是dgram,stream,seqpacket.设置用户和组的默认值为0 |
| user <username> | 在执行该服务之前变换用户名,如果进程需要Linux的能力,就不能使用该命令 |
| group <groupname> [<groupname>]* | 在执行该服务之前变换组名 |
| oneshot | 在服务退出时不要重新启动它 |
| class <name> | 为服务指定一个类名。一个被命名的类中的所有服务都可以一起被启动或停止。如果服务没有通过类选项来指定的话,它是在类default中的 |
| onrestart | 当服务重新启动时,执行一条命令 |
下面以init.rc文件中的配置为例简要说明一个服务的配置:
service zygote /system/bin/app_process -Xzygote /system/bin -zygote
--start-system-server
class main
socket zygote stream 666
onrestart write /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestart restart media
onrestart restart netd
在上面代码中,第一行配置了一个名为zygote的服务,这个服务将会运行/system/bin/app_process,剩余部分为参数(以空格分割)。
剩下的几行代码声明了此服务的选项。这说明zygote是一个类型为main的服务(classmain)并且它会创建一个socket,这个socket的类型为stream,权限为666(socket zygote stream 666)。当重启此服务的时候,需要完成以下事情。
?写/sys.android_power/request_state为wake
?写/sys/power/state为on
?重新启动media服务
?重新启动netd服务
init.rc文件需要在init启动期被解析成系统可以识别的数据结构。前面我们读懂了init.rc的含义,下面我们就来看看init是如何保存和组织这些信息的,首先,我们来看看在init中如何表示动作,服务和命令,如下表所示:
| 组件 | 数据结构 | 说明 | |||
| 列表节点(listnode) |
| listnode是一个表示位置的数据结构,可以用来定义不同类型节点(比如动作或者服务)的执行顺序 从左侧的数据结构中可以看出,这里包含了两个listnode的指针,它们用于指向前一个和后一个将要执行的节点 这些信息将帮助各种节点(动作,服务,以及命令等)组成一个双向循环列表 | |||
| 动作(action) |
| action中包含4个表示节点位置信息的节点,它们分别表示它本身在所有动作中的位置(alist),在添加动作的队列中的位置(qlist),以及在某个触发器中的所有动作列表的位置(tlist) action 数据结构中包含了其他的重要信息,比如动作的名字(name),包含的所有命令列表(commands)以及当前命令 | |||
| 服务(service) |
| 这个数据结构中包含了服务的信息,主要包括如下内容: ?该服务在所有服务列表中逻辑位置的数据结构“listnode”(slist) ?服务的基本信息,比如服务的名称,进程的相关信息,所需要参数信息等 | |||
| 命令(command) |
| 这个数据结构中包括以下内容: ?节点的位置信息(clist) ?命令需要执行的函数的函数指针(func) ?参数信息:nargs和args[1] |
最后,我们通过解析init.rc中的一个片段来说明解析过程。
开始解析之前,需要了解整个解析过程至关重要的一个数据结构,那就是parse_state,它保存了整个解析过程中所处的状态,下图显示了它的“成分”
| <<struct>> parse_state |
| +*ptr:char +*text:char +line:int +nexttoken:int +*context:void +(*parse_line)(struct parse_state *state,int nargs,char **args):void +*filename:char |
③用init解析整个init.rc文件
现在我们 回到init启动的初期,这里它调用了init_parse_config_file()方法,而这个方法就是解析init.rc文件的入口。用init解析整个init.rc文件的流程如下图所示。
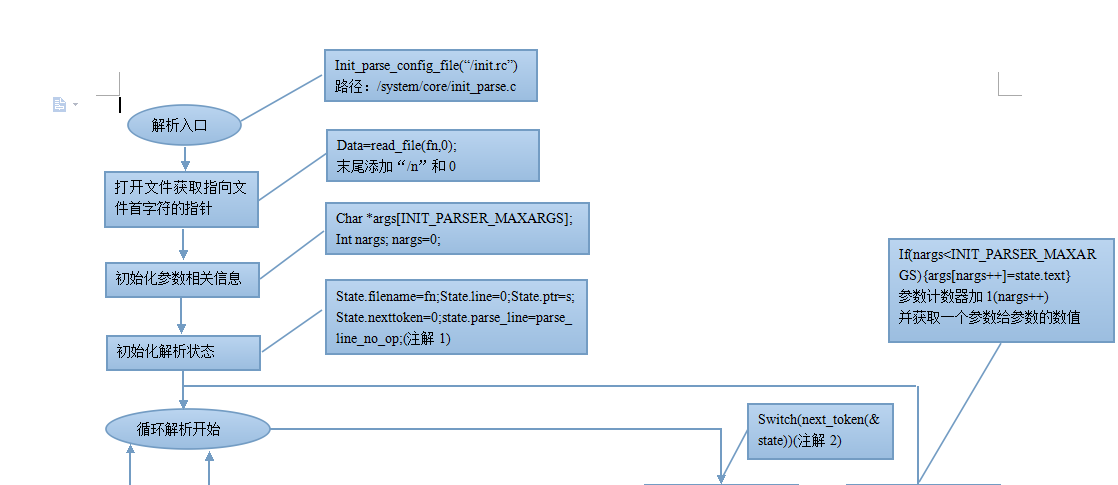
下面我们了解一下上图中的注解、
注解1:state是一个被命名为parser_satte的结构体,用于保存当前文件的解析状态信息,包括解析的文件(filename),当前解析的行号(line),当前解析的文字指针(ptr),指示下一个动作的变量(nexttoken)以及解析这一行需要的函数指针(parse_line)等。
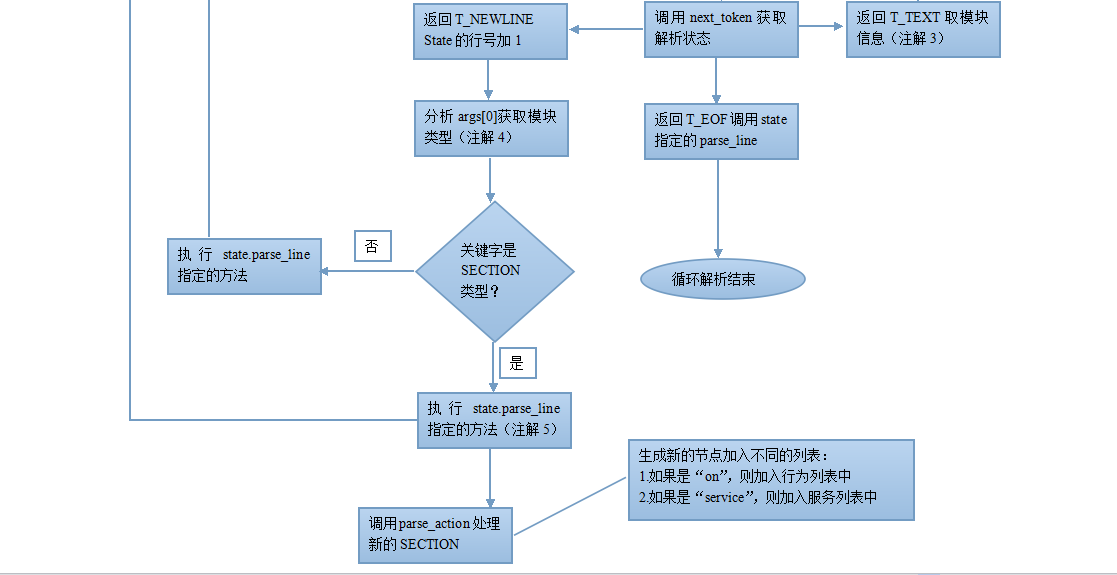
注解2:next_token()函数位于/system/core/init/parse.c中,用于分析init.rc文件的内容。它只返回3个状态,分别是:T_EOF(文件结束),T_NEWLINE(一行结束)和T_TEXT(表示遇到第一个空格)。
注解3:init.rc中每一行的信息通过空格被分割为若干段,而这些信息共同组成args[INIT_PARSER_MAXARGS]的内容,并由nargs计数。例如on fs经过解析后,这一行分为两段(分别是on和fs),分别存放在args中,计数器的值为2.。
注解4:init.rc的每一行经过分割后,需要分析其类型(由lookup_keyword返回)。/system/core/init/keywords.h中定义了所有关键字的类型。在片段KEYWORD(on,SECTION,0,0)中,on关键字是一个SECTION,有0个(也就是不需要)参数,没有对应的触发函数(也就是最后一个0)。
注解5:state.parse_line是一个函数的指针,可以根据关键字指向两种不同的解析方法――parse_line_service(处理服务的选项)和parse_line_action(处理行为的命令)。按照这个流程,init完成整个init.rc文件的解析,并生成service_list和action_list,后续流程所需要的信息将从这两个列表中获取,将需要执行的命令或启动的服务加入action_queue中,这样就完成了Android系统基础部分的启动。
在启动的过程中,需要特别注意的是,我们通过action_for_each_trigger()方法声明需要执行的命令队列,该方法的代码如下所示:
void action_for_each_trigger(const char * trigger,void (*func)(struct action *act)){
struct listnode * node;
struct action *act;
list_for_each(node,&action_list){
act=node_to_item(node,struct action,alist);
if(!strcmp(act->name,trigger)){
func(act);
}
}
}
在上述代码中,list_for_each()用于遍历action_list中的每一个节点,返回节点在列表中的位置信息,然后通过node_to_item()方法生成一个action的信息,最后执行func()函数。
action_for_each_trigger()方法在init.rc中是这样调用的:
action_for_each_trigger(early-init,action_add_queue_tail);
它的含义是,在action_list中查找名字为early-init的节点,并将其信息通过action_add_queue_tail()方法加入action_queue队列的尾部。
然后在init的无限循环中遍历action_queue中的每一个节点,执行它们所包含的命令。
讲到这里,我们了解了init如何对待init.rc文件的内容。下面扩展一下知识,概要介绍一下Android系统中*.rc文件的关键字及其使用需求,如下表。如果你想修改或编写自己的.rc文件,那么请关注下表。
| 关键字 | 类型 | 参数个数 |
| capability | OPTION | 0 |
| chdir | COMMAND | 1 |
| chroot | COMMAND | 1 |
| class | OPTION | 0 |
| class_start | COMMAND | 1 |
| class_stop | COMMAND | 1 |
| class_reset | COMMAND | 1 |
| console | OPTION | 0 |
| critical | OPTION | 0 |
| disabled | OPTION | 0 |
| domainname | COMMAND | 1 |
| exec | COMMAND | 1 |
| export | COMMAND | 2 |
| group | OPTION | 0 |
| hostname | COMMAND | 1 |
| ifup | COMMAND | 1 |
| insmod | COMMAND | 1 |
| import | SECTION | 1 |
| keycodes | OPTION | 0 |
| mkdir | COMMAND | 1 |
| mount | COMMAND | 3 |
| on | SECTION | 0 |
| oneshot | OPTION | 0 |
| onrestart | OPTION | 0 |
| restart | COMMAND | 1 |
| rm | COMMAND | 1 |
| rmdir | COMMAND | 1 |
| service | SECTION | 0 |
| setenv | OPTION | 2 |
| setkey | COMMAND | 0 |
| setprop | COMMAND | 2 |
| setrlimit | COMMAND | 3 |
| socket | OPTION | 0 |
| start | COMMAND | 1 |
| stop | COMMAND | 1 |
| trigger | COMMAND | 1 |
| Symlink | COMMAND | 1 |
| sysclktz | COMMAND | 1 |
| user | OPTION | 0 |
| wait | COMMAND | 1 |
| write | COMMAND | 2 |
| copy | COMMAND | 2 |
| chown | COMMAND | 2 |
| chmod | COMMAND | 2 |
| loglevel | COMMAND | 1 |
| load_persist_props | COMMAND | 0 |
| ioprio | OPTION | 0 |
2.创建system_service进程
在init进程的启动过程中,比较重要的部分由孵化进程启动system_service进程,下面详细介绍一下这个部分。system_service进程将会为我们创建一些重要的Android核心服务,包括ActivityManagerService,PackageManagerService和PowerManagerService等,这些将成为应用程序的基础,并为应用程序提供必要的接口。
①创建流程
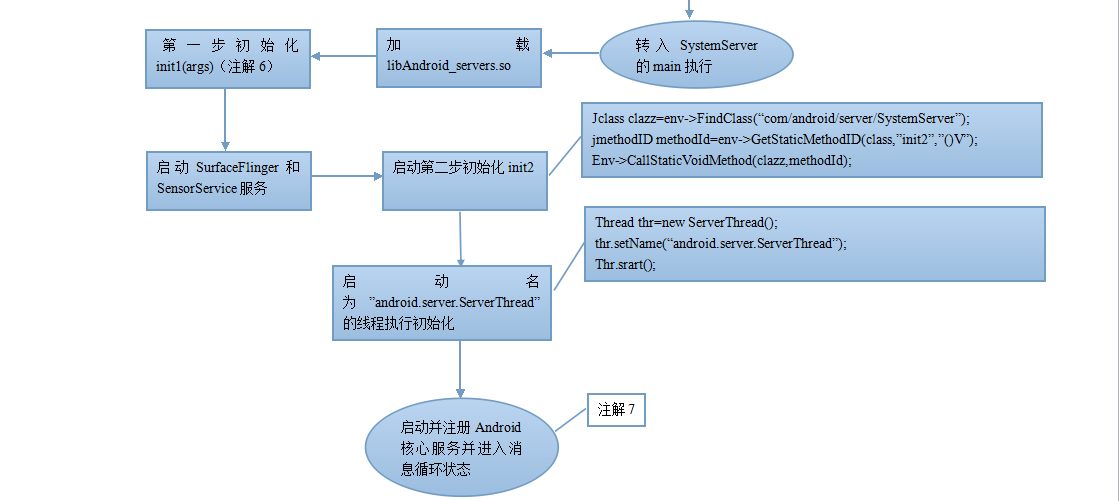
完成应用程序的初始化之后,init进程将创建一个名叫system_service的重要进程,而我们将在此进程中创建Android核心服务。下图显示了system_process进程以及核心服务的创建过程。

注解1:init进程会按顺序启动各种类型的服务(包括core和main)。首先启动core类型的服务。然后启动main类型的服务。由于孵化服务为main类型,所以它会在core类型的服务之后启动。因此,这里启动用于管理服务的服务――servicemanager。启动和入口如下所示。
?启动:service zygote /system/bin/app_process -Xzygote /system/bin --zygote--start-system-server
?入口:/frameworks/base/cmds/app_process/app_main.cpp的main()函数。
注解2:此时转向/frameworks/base/core/jni/AndroidRuntime.cpp的start()函数。
注解3:启动代码如下:
jmethodId startMeth=env->GetStaticMethodID(startClass,"main",....);
env->CallStaticVoidMethod(startClass,startMeth,strArray);
此时转向com.android.internal.os.ZygoteInit的main()方法执行。
注解4:
?加载frameworks下的preloaded-classes类。
?加载framework-res.apk下的资源。
注解5:孵化进程的主要目的就是孵化出system_process进程,这个时候流程将转向/frameworks/base/services/java/com/android/server/SystemServer.java的main()方法执行,而自身进入死循环成为守护进程。
注解6:init1()调用本地android_server_SystemServer_init1(/frameworks/base/services/jni/com_android_server_SystemServer.cpp)后,通过libAndroid_servers.So的system_init()函数启动两个服务并启动init2()、
注解7:这里启动并注册剩余的必需服务(比如包服务和Activity服务等)。最终会启动Launcher来到桌面,至此整个启动过程完成。
②system_service简介
system_service进程非常重要,它创建了许多重要的服务,那么如何加入system_service中并接受管理呢?具体如下面的代码所示:
try{
Slog.i(TAG,"Backup Service");
ServiceManager.addService(Context.BACKUP_SERVICE,new BackupManagerService(context));
}catch(Throwable e){
Slog.e(TAG,"Failure starting Backup Service",e);
}
以上代码展示了system_process如何将备份服务加入服务管理器中的,其中粗体部分的代码完成了两件事情:第一,创建备份服务;第二,使用ServiceManager的addService()方法将创建出来的备份服务实例加入服务管理器中加以管理。
下表列出了system_service的服务关键字等知识。
| 服务关键字 | 类 | 备注 |
| entropy | EntropyService | 熵服务 |
| power | PowerManagerService | 电源管理服务(Context.POWER_SERVICE) |
| activity | ActivityManagerService | Activity管理服务 |
| telephony.registry | TelephonyRegistry | 电话服务 |
| package | PackageManagerService | 包管理服务 |
| account | AccountManagerService | 账户管理服务(Context.ACCOUT_SERVICE) |
| battery | BatteryService | 电池服务 |
| vibrator | VibratorService | 振动服务 |
| alarm | AlarmManagerService | 报警服务(Context.ALARM_SERVICE) |
| window | WindowManagerService | 窗口服务(Context.WINDOW_SERVICE) |
| bluetooth | BluetoothService | 蓝牙服务(BluetoothAdapter.BLUETOOTH_SERVICE) |
| statusbar | StatusBarManagerService | 状态栏服务(Context.STATUS_BAR_SERVICE) |
| input_method | InputMethodManagerService | 输入法管理服务(Context.INPUT_METHOD_SERVICE) |
| location | LocationManagerService | 位置管理服务(Context.LOCATION_SERVICE) |
| wallpaper | WallpaperManagerService | 壁纸管理服务(Context.WALLPAPER_SERVICE) |
| audio | AudioService | 声音服务(Context.AUDIO_SERVICE) |
| user | UserManagerService | 用户管理服务(Context.USER_SERVICE) |
下面以获取声音服务为例介绍获取服务的方法:
AudioService as=(AudioService)context.getSystemService(Context.AUDIO_SERVICE);
此时整个系统也就完成了启动工作,这也意味着我们可以开始使用Android设备了。
版权声明:本文为博主原创文章,未经博主允许不得转载。