ԭ�������ƣ�Layer Normalization
ԭ���ĵ�ַ�� https://arxiv.org/abs/1607.06450
֮ǰ�н���Batch Normalization��ԭ�������ӣ�����������Layer Normalization��Layer Normalization�������Ȼ���Դ�����������ģ�������RNNѭ�������硣Ϊʲô��ʹ��ֱ��BN�أ���Ϊ��RNN����ʱ�������У�ʱ��ij��Ȳ�����һ����ֵ��������Ȳ�һ����ͬ��������ÿ�仰�ij��̶���һ����ͬ�����к���ȥʹ��BN���������������Layer Normalization��ע�⣬��ͼ����������BN��LN�Ǹ���Ч�ģ������ںܶ��˽���Ȼ���������ģ����������ͼ����Vision Transformer����ʱ���ǻ��漰��LN����
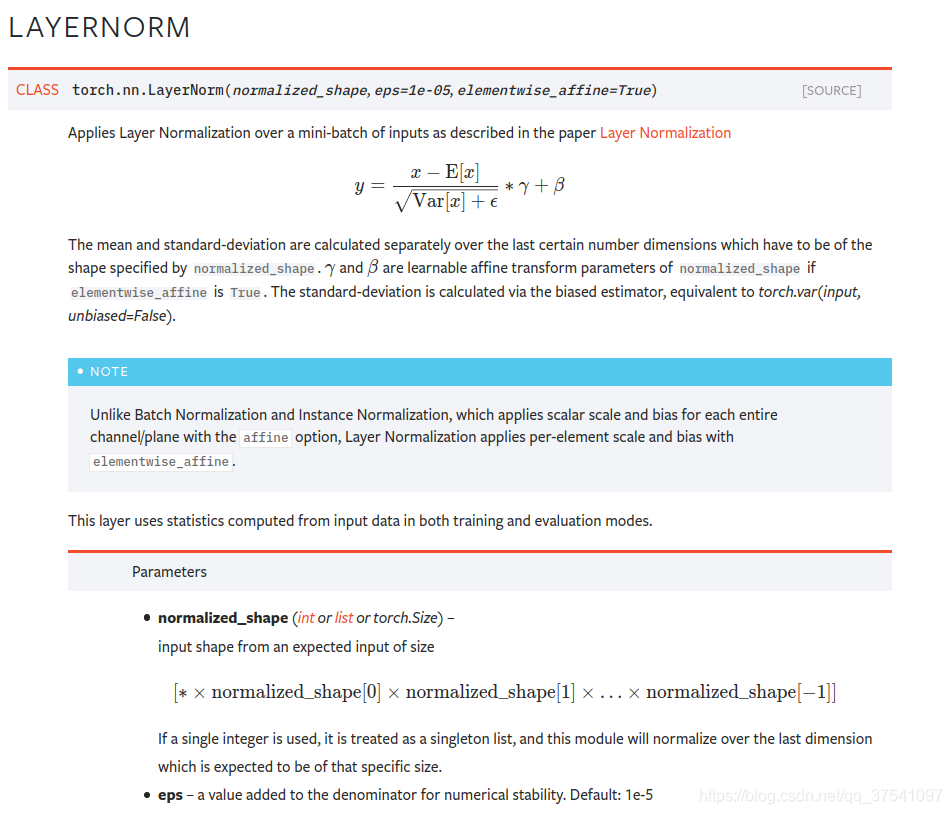
�������ľͲ����ˣ�����ֱ�ӿ���Pytorch�ٷ����Ĺ���LayerNorm�ļ��ܡ�ֻ����ʽ�Ļ��о���BNûʲô���𣬶��Ǽ���ֵE(x)E(x)E(x)�����Ա���Var(x)+?\sqrt{Var(x) + \epsilon }Var(x)+?? ����?\epsilon?��һ���dz�С������Ĭ��10?510^{-5}10?5������Ϊ�˷�ֹ��ĸΪ�㡣ͬ��Ҳ��������ѵ���IJ�����,��\beta, \gamma��,������ͬ���ǣ�BN�Ƕ�һ��batch���ݵ�ÿ��channel����Norm��������LN�ǶԵ������ݵ�ָ��ά�Ƚ���Norm������batch�أ�������ʾ������������BN��ѵ��ʱ����Ҫ�ۼ�moving_mean��moving_var���������ģ�����BN����4������moving_mean,moving_var,��,��moving\_mean, moving\_var, \beta, \gammamoving_mean,moving_var,��,��������LN����Ҫ�ۼ�ֻ����,��\beta, \gamma��,������������
��Pytorch��LayerNorm�����и�normalized_shape����������ָ����ҪNorm��ά�ȣ�ע�⣬����˵����the last certain number of dimensions��ָ����ά�ȱ����Ǵ����һά��ʼ�����������ǵ����ݵ�shape��[4, 2, 3]����ônormalized_shape������[3]�����һά�Ͻ���Norm��������Ҳ������[2, 3]��Norm�������ά�ȣ���Ҳ������[4, 2, 3]��������ά�Ƚ���Norm������������[2]����[4, 2]������ᱨ���´�����normalized_shape=[2]Ϊ������
RuntimeError:
Given normalized_shape=[2],
expected input with shape [*, 2],
but got input of size[4, 2, 3]
��ʾ���Ǵ����normalized_shape=[2]������ϵͳ�������Ǵ����normalized_shape�������ڴ�����������shapeӦ��Ϊ[*, 2]������һ��ά�ȴ�СӦ����2��������ʵ�ʴ��������shape��[4, 2, 3]���Ա����ˡ�
���ţ�������������ʾ������������д�IJ��Դ��룬�ֱ�ʹ�ùٷ���LN�������Լ�ʵ�ֵ�LN�������бȽϣ����Լ�������Ƿ���ȷ��
import torch
import torch.nn as nndef layer_norm_process(feature: torch.Tensor, beta=0., gamma=1., eps=1e-5):var_mean = torch.var_mean(feature, dim=-1, unbiased=False)# ��ֵmean = var_mean[1]# ����var = var_mean[0]# layer norm processfeature = (feature - mean[..., None]) / torch.sqrt(var[..., None] + eps)feature = feature * gamma + betareturn featuredef main():t = torch.rand(4, 2, 3)print(t)# �������һ��ά������norm����norm = nn.LayerNorm(normalized_shape=t.shape[-1], eps=1e-5)# �ٷ�layer norm����t1 = norm(t)# �Լ�ʵ�ֵ�layer norm����t2 = layer_norm_process(t, eps=1e-5)print("t1:\n", t1)print("t2:\n", t2)if __name__ == '__main__':main()����ʹ��torch.rand�����������һ��shapeΪ[4, 2, 3]�ı���t:
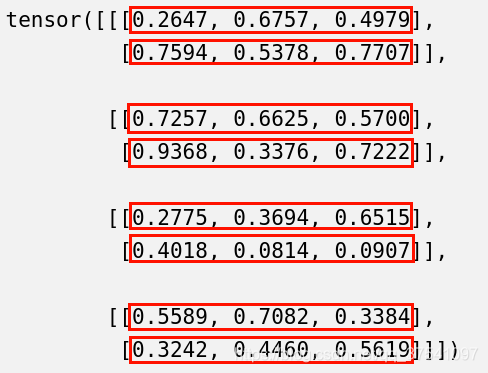
����ʹ�ùٷ��ķ�������һ��LN�㣬����t.shape[-1]ָ�������ݵ����һ��ά��3��ֻ�����һ��ά�Ƚ���Norm����������ͼ���ú�ɫ���ѡ����ÿ�����ݣ�
# �������һ��ά������norm����
norm = nn.LayerNorm(normalized_shape=t.shape[-1], eps=1e-5)
Ȼ�����ݴ���ʵ�����õ�norm��õ����½����
tensor([[[-1.2758, 1.1659, 0.1099],[ 0.6532, -1.4123, 0.7591]],[[ 1.1400, 0.1522, -1.2922],[ 1.0942, -1.3229, 0.2287]],[[-0.9757, -0.3983, 1.3741],[ 1.4134, -0.7379, -0.6755]],[[ 0.1563, 1.1389, -1.2951],[-1.2341, 0.0203, 1.2138]]], grad_fn=<NativeLayerNormBackward>)
Ȼ������Լ�ʵ�ֵ�LayerNorm������ע�⣬��\beta�����Ϊ0����\gamma�����Ϊ1������ͨ��ѵ������ѧϰ�����ģ��õ����½����
tensor([[[-1.2758, 1.1659, 0.1099],[ 0.6532, -1.4123, 0.7591]],[[ 1.1400, 0.1522, -1.2922],[ 1.0942, -1.3229, 0.2287]],[[-0.9757, -0.3983, 1.3741],[ 1.4134, -0.7379, -0.6755]],[[ 0.1563, 1.1389, -1.2951],[-1.2341, 0.0203, 1.2138]]])
�����Ժٷ��õ��Ľ����һģһ���ģ���Ҳ˵�����Լ�����������ȷ�ġ�