分支定界―branch and bound
定义
分支定界算法始终围绕着一颗搜索树进行的,我们将原问题看作搜索树的根节点,从这里出发,分支的含义就是将大的问题分割成小的问题。大问题可以看成是搜索树的父节点,那么从大问题分割出来的小问题就是父节点的子节点了。分支的过程就是不断给树增加子节点的过程。而定界就是在分支的过程中检查子问题的上下界,如果子问题不能产生一比当前最优解还要优的解,那么砍掉这一支。直到所有子问题都不能产生一个更优的解时,算法结束。
由此可见,其实分支定界有一股很大的枚举意味在里面,只不过加上了定界的过程以后,变成了一种非常有规律的枚举。
原理解析

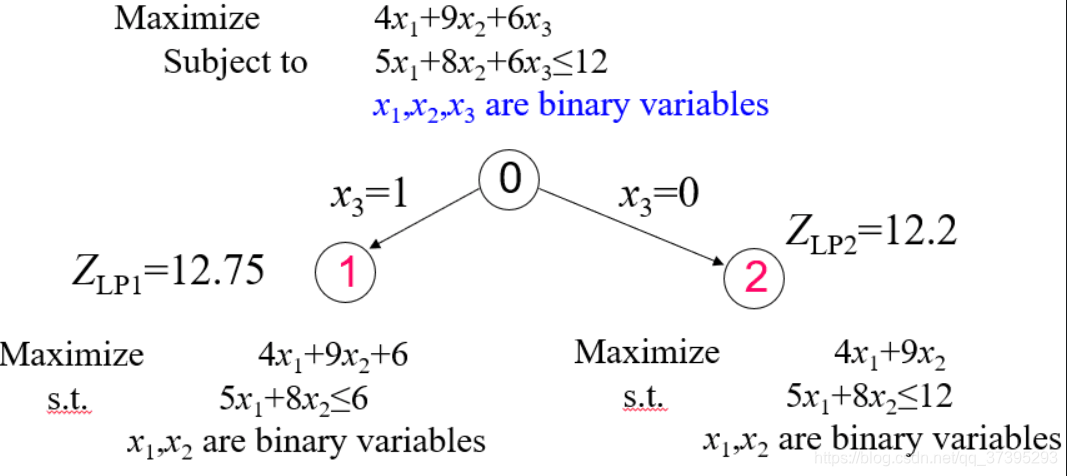
通过线性松弛求得两个子问题的upper bound为Z_LP1 = 12.75,Z_LP2 = 12.2。由于Z_LP1 和Z_LP2都大于BestV=-INF,说明这两支有搞头。继续往下。
通过线性松弛求得两个子问题的upper bound为Z_LP1 = 12.75,Z_LP2 = 12.2。由于Z_LP1 和Z_LP2都大于BestV=-INF,说明这两支有搞头。继续往下。
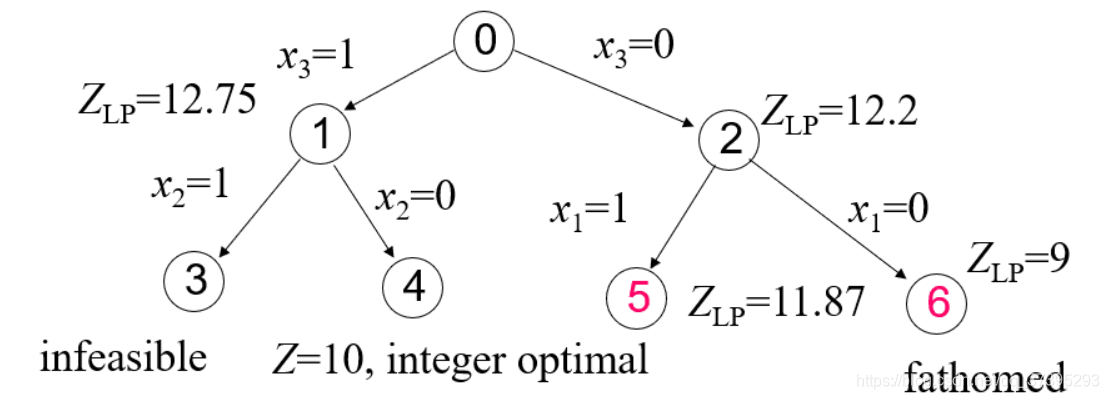
子问题3已经不可行,无需再理。子问题4通过线性松弛得到最优解为10,刚好也符合原问题0的所有约束,在该支找到一个可行解,更新BestV = 10。
子问题5通过线性松弛得到upper bound为11.87>当前的BestV = 10,因此子问题5还有戏,待下一次分支。而子问题6得到upper bound为9<当前的BestV = 10,那么从该支下去找到的解也不会变得更好,所以剪掉!
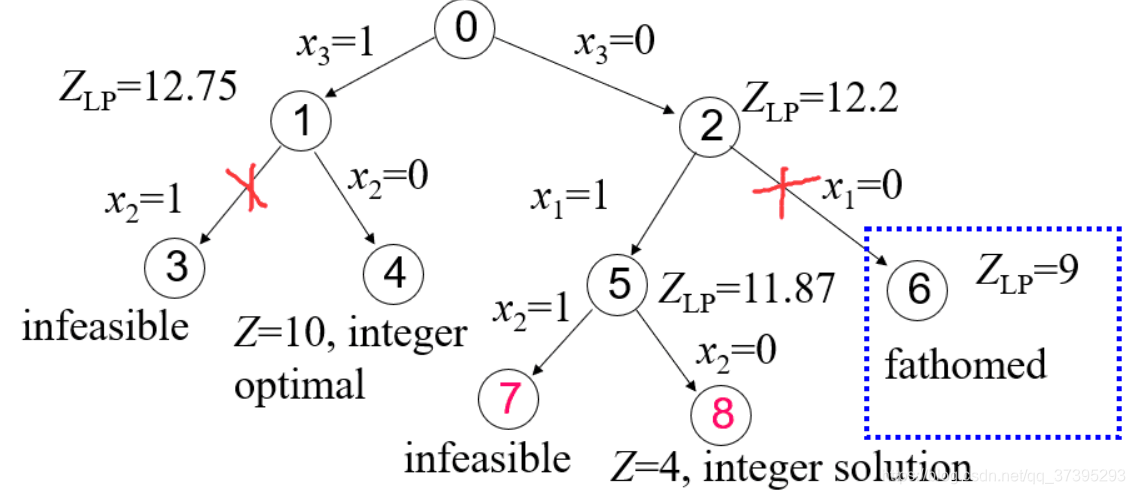
子问题7不可行,无需再理。子问题8得到一个满足原问题0所有约束的解,但是目标值为4<当前的BestV=10,所以不更新BestV,同时该支下去也不能得到更好的解了。
分支定界法(branch and bound)是一种求解整数规划问题的最常用算法。这种方法不但可以求解纯整数规划,还可以求解混合整数规划问题。上面用了求解整数规划的例子,这虽然有助于我们更好理解这个算法,但是针对整数规划这一特定问题的过程描述,有可能会对我们的思维带来局限性。而不能更好的理解该算法的精髓。下面是一个更通用的算法框架,以便大家能更好的了解分支定界算法的真正精髓所在。
1. Using a heuristic, find a solution xh to the optimization problem. Store its value, B = f(x_h). (If no heuristic is available, set B to infinity.) B will denote the best solution found so far, and will be used as an upper bound on candidate solutions.2. Initialize a queue to hold a partial solution with none of the variables of the problem assigned.3. Loop until the queue is empty:3.1. Take a node N off the queue.3.2. If N represents a single candidate solution x and f(x) < B, then x is the best solution so far. Record it and set B ← f(x).3.3. Else, branch on N to produce new nodes Ni. For each of these:3.3.1. If bound(N_i) > B, do nothing; since the lower bound on this node is greater than the upper bound of the problem, it will never lead to the optimal solution, and can be discarded.3.3.2. Else, store Ni on the queue.
Breadth-first search (BFS):广度优先搜索,就是横向搜索,先搜索同层的节点。再一层一层往下。这种搜索可以用FIFO queue实现。
Depth-first search (DFS):深度优先搜索,就是纵向搜索,先一个分支走到底,再跳到另一个分支走到底。这种搜索可以用LIFO queue也就是栈实现。
Best-First Search:最佳优先搜索,最佳优先搜索算法是一种启发式搜索算法(Heuristic Algorithm),其基于广度优先搜索算法,不同点是其依赖于估价函数对将要遍历的节点进行估价,选择代价小的节点进行遍历,直到找到目标点为止。这种搜索可以用优先队列priority queue来实现。
转载自:https://www.cnblogs.com/dengfaheng/p/11225612.html