������
1.ȷ�����ڹ�����Ŀ¼�ռ䣻
2.ȷ���Ѿ����ӻ���������
ִ����䣺
roslaunch ur3_moveit_config demo.launch
�������⣺
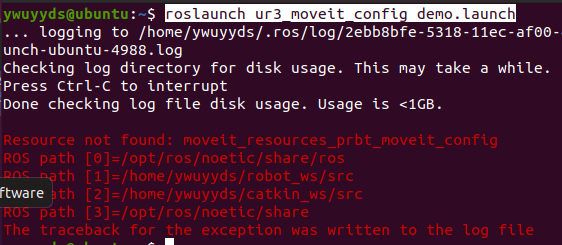
���������
1�� ͨ��ʹ���������װ�ð��ɽ������
sudo apt install ros-noetic-moveit-resources-prbt-moveit-config
�ٴ�����demo.launch�ļ��м��������´���
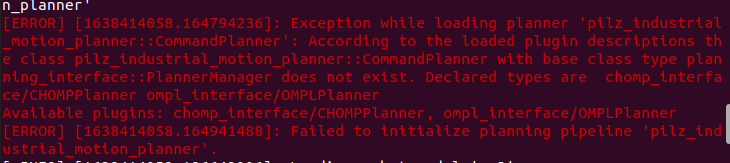
���������
2�� ͨ��ʹ���������װ�ð��ɽ������
sudo apt install ros-noetic-pilz-industrial-motion-planner
������Щ�����ȫ�������..
ԭ�����ӣ�
ubuntu20.04��ros�����˿���ʵ���� moveit roslaunch arm_moveit_config demo.launch ����_zhaojieming1990�IJ���-CSDN����