从solidworks导出的URDF模型,经过moveit_setup_assistant进入catkin_make工程,到roslaunch打开demo.launch,其他地方都没有问题,唯一问题出现在求解器上,求解器一直无法打开,并出现以下错误:
[ INFO] [1556855316.995063291]: compiled against OGRE version 1.9.0 (Ghadamon)
[move_group-3] process has died [pid 10585, exit code -6, cmd /opt/ros/melodic/lib/moveit_ros_move_group/move_group --debug __name:=move_group __log:=/home/tinnu/.ros/log/71eb5440-6d4c-11e9-9ac2-080027c0e628/move_group-3.log].
log file: /home/tinnu/.ros/log/71eb5440-6d4c-11e9-9ac2-080027c0e628/move_group-3*.log
[ INFO] [1556855317.193806032]: Stereo is NOT SUPPORTED
[ INFO] [1556855317.195200202]: OpenGl version: 3 (GLSL 1.3).
[ INFO] [1556855320.480455065]: Loading robot model 'simplearm8.SLDASM'...
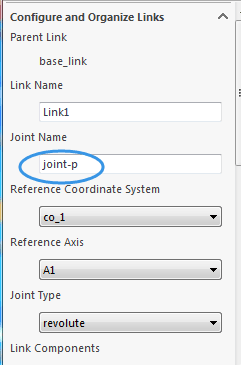
[ERROR] [1556855320.484606053]: Exception caught while processing action 'loadRobotModel': Character [-] at element [46] is not valid in Graph Resource Name [/robot_description_planning/joint_limits/joint-p/max_position]. Valid characters are a-z, A-Z, 0-9, / and _.之前一直没有留意错误信息,觉得错误信息都是可有可无的,结果不断从入门到放弃,最近不甘心,重新研究了一番,才发现最后一行大有深意!
最后一行的意思是:因为“-”这个元素被支持,所以robot_description_planning这个节点崩溃了,求解器没法打开!
“-”在哪呢?
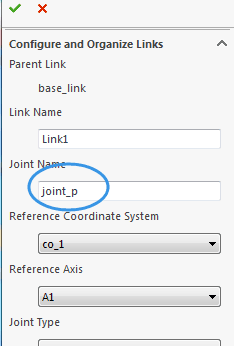
经过一番探寻,终于发现原来是关节名字设置错了!
他不支持“-”,分隔可以用"_"(下划线)