官方项目地址:含论文和代码
来自北大才子 立夏之光的 ICCV Oral ,理论很漂亮。属于Non local方式
Updated on 2020.1.6
最近一直有人私信我,这个attention map怎么初始化,我厌其烦,就在博客里面补上获得attention map的代码,作者源码里面是没有可视化attention map的代码。
idea
由于理论方面涉及了机器学习算法 - EM算法,博主虽然学过EM,但时间久远有些记不起,这篇论文吧博主看了很久,依然没能理解其精髓,但是不影响我会使用它(哈哈)。言归正传。
在语义分割中,越来越多Non local的方法出现了,并且都取得了精度上的进步,说明Non local确实是有用的。但是这些方法都不能避免庞大的计算量,比如DANet,有很大的矩阵相乘。
EMANet的提出正是为解决Non local带来的计算量过于庞大。通过EM,E步学习一组attention maps, M步更新一组基,经过几次迭代之后,用基和maps 重构特征。 基的向量长度可以是个比较小的数值,我们可以理解为通过把原始特征降维,在低维的流形中建模像素之间的联系,这样的话,可以省略很多计算量。然后通过基和attention maps 重构出高维的、带有全局性的信息的特征。用这个特征在去做最后的分割。
network
本文不关注理论,只关注步骤,因为理论是在太难弄懂了。有关理论,可以去看第一作者的知乎专栏。
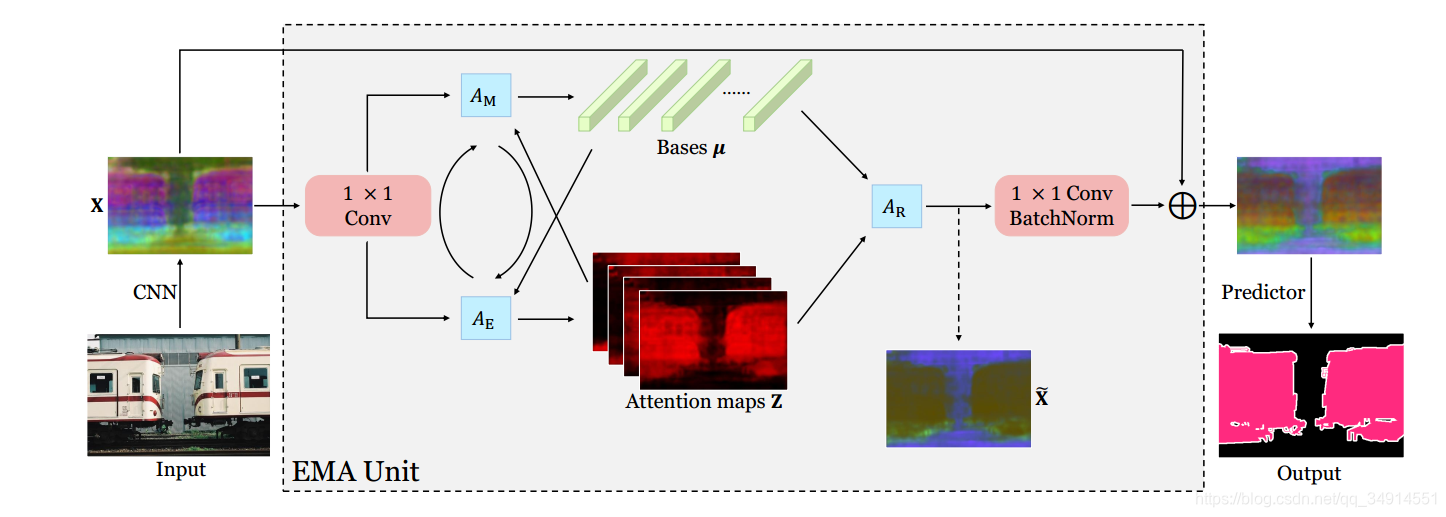
- 经过一个CNN-based backjbone 得到特征X,经过一个 1x1的卷积降维,(因为ResNet最后的卷积输出的是2048通道的,太大了),降至512个通道。假设X∈RN×C,N=H×WX \in R^{N \times C}, N = H \times WX∈RN×C,N=H×W。 H和W是特征图X的分辨率尺寸。
- 初始化一个μ∈RK×C\mu \in R^{K \times C}μ∈RK×C作为基, K指的是有K个基。
- E步: 得到attention maps, 记作Z。 Z=softmax(λXμT)∈RN×KZ = softmax(\lambda X \mu^T) \in R^{N \times K}Z=softmax(λXμT)∈RN×K, 即有K个maps, 每一个map的尺寸是H x W (N)
- M步: 更新基μ\muμ,得到的maps Z, 先在第2个维度,即(dim=1,从0开始算)求和,做一个normlize。具体看代码解读部分。
- 在每次M步之后,为了保证μ\muμ的学习是稳定的,选择L2Norm对μ\muμ做归一化。
- E步和M步重复T次,T在论文中为3。
- 训练中使用moving average更新μ\muμ,测试阶段跳过这一步。
- 用得到的maps Z和基μ\muμ重构X,得到X~∈RN×C\widetilde{X} \in R^{N\times C}X ∈RN×C
- 然后把X~\widetilde{X}X reshape到CxHxW。送到接下来的segHead中。
基不是公共的。每一个样本经过迭代都会得到各自的基,因为不同图像的分布不一样。
Attention Maps
那么既然一组低维空间的基和一组maps(都是K个),能够学习到Non local的信息,那么我们自然该看看这些maps长得是什么样子吧。

我在网上找了一张图像,里面的类别都是VOC数据集出现的。
一共有64个maps,下面是一部分。
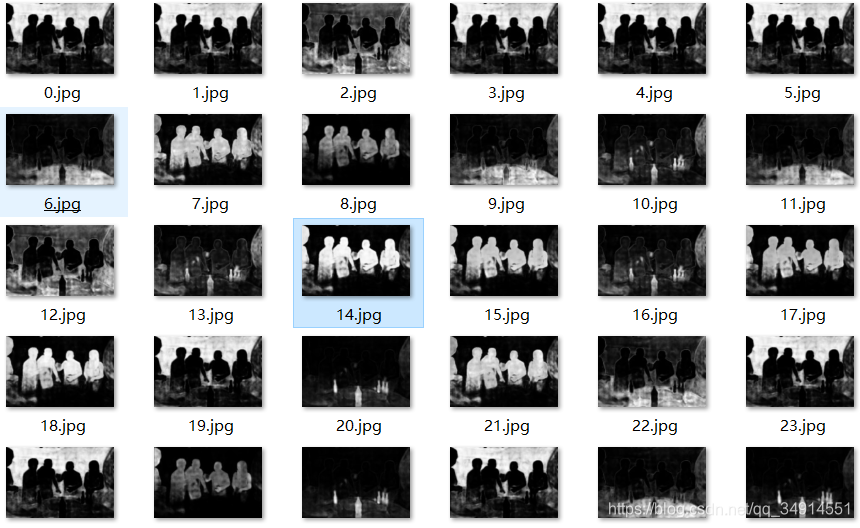
从上图中,可以发现模型确实在低维流形中学习到了Non loca的信息,还减小了计算量。而且通过降维学习(低秩)学习的基可以说是没有冗余的(正交基)。
code explain
下面的代码块是EMA(EM attention) 模块的代码。
def forward(self, x):idn = x# The first 1x1 convx = self.conv1(x)# The EM Attentionb, c, h, w = x.size()x = x.view(b, c, h*w) # b * c * nmu = self.mu.repeat(b, 1, 1) # b * c * k # k 个 基with torch.no_grad():for i in range(self.stage_num): # 迭代T次x_t = x.permute(0, 2, 1) # b * n * cz = torch.bmm(x_t, mu) # b * n * kz = F.softmax(z, dim=2) # b * n * kz_ = z / (1e-6 + z.sum(dim=1, keepdim=True)) # 这一步对应论文 sec4.2,reweight X的公式mu = torch.bmm(x, z_) # b * c * kmu = self._l2norm(mu, dim=1) # 为了让基的学习更稳定,并且不改变基的方向,保持基的正交性。(正交是冗余最低的形式)z_t = z.permute(0, 2, 1) # b * k * nx = mu.matmul(z_t) # b * c * nx = x.view(b, c, h, w) # b * c * h * wx = F.relu(x, inplace=True)# 跳跃链接x = self.conv2(x)x = x + idnx = F.relu(x, inplace=True)return x, mu
整个模型的forward结构如下
def forward(self, img, lbl=None, size=None):x = self.extractor(img) # backbonex = self.fc0(x) # 降维到512个通道x, mu = self.emau(x) # 经过EMA模块x = self.fc1(x) # seg Headx = self.fc2(x)if size is None:size = img.size()[-2:]pred = F.interpolate(x, size=size, mode='bilinear', align_corners=True) # 向原图大小插值。这里不能用label向特征大小差值,因为label在原图空间填充了ignore label,如果对label下采样,会破坏ignore label的值。if self.training and lbl is not None:loss = self.crit(pred, lbl)return loss, muelse:return pred
还有一个地方值得注意,在EMA模块里,
mu = torch.Tensor(1, c, k) # 512 64
mu.normal_(0, math.sqrt(2. / k)) # Init with Kaiming Norm.
mu = self._l2norm(mu, dim=1)
self.register_buffer(‘mu’, mu)
μ\muμ的初始化这样的。μ\muμ不是一个Parameter,而是一个buffer。对应原文,基的训练方式,究竟是通过反向传播训练还是moving average。
attention map可视化
首先要知道,众多的变量中,哪个是attention map。
...b, c, h, w = x.size()x = x.view(b, c, h*w) # b * c * nmu = self.mu.repeat(b, 1, 1) # b * c * k # k个基with torch.no_grad():for i in range(self.stage_num):x_t = x.permute(0, 2, 1) # b * n * cz = torch.bmm(x_t, mu) # b * n * kz = F.softmax(z, dim=2) # b * n * kz_ = z / (1e-6 + z.sum(dim=1, keepdim=True)) # 这一步是为啥?论文 sec4.2mu = torch.bmm(x, z_) # b * c * kmu = self._l2norm(mu, dim=1)z_t = z.permute(0, 2, 1) # b * k * nself.z = z_t.view(b, mu.size(2), h, w) # b * k * h * w...
倒数第二行的z就是attention map,当然这个时候z的shape不是我们要的,所以先换轴,在reshape。
在EMANet的forward中,加入
self.attention_maps = F.interpolate(self.emau.z, size=size,mode='bilinear', align_corners=True)
把attention map resize至原图大小。
然后在Session 的call中,获取attention map
def __call__(self,img):img = self.preprocessing(img)with torch.no_grad():logit = self.net(img)pred = logit.max(dim=1)[1]attention_map = self.net.module.attention_maps # 这里得到attention mapreturn pred.data.squeeze(0).cpu().numpy(), attention_map.data.squeeze(0).cpu().numpy()
在main函数中,保存即可,但是在保存之前别忘了将数值范围normalize到0-255,还的是opencv支持的uint8型。
pred, attention_maps = sess(image[:,:,::-1].copy())# print(pred.shape)# print(attention_maps.shape)if not os.path.exists('./attentionMaps'):os.makedirs('./attentionMaps')for i in range(attention_maps.shape[0]):attention_map = attention_maps[i]attention_map = (attention_map - attention_map.min()) / (attention_map.max() - attention_map.min())attention_map = attention_map *255cv2.imwrite('./attentionMaps/' + str(i)+ '.jpg', np.uint8(attention_map))
所以不要再问我attention map如何可视化了,我也不会再回答了。