Practical Poissonian-Gaussian noise modeling and fitting for single-image raw-data
����Ŀ¼
- Practical Poissonian-Gaussian noise modeling and fitting for single-image raw-data
-
- Poissonian-Gaussian Modeling
- The Noise Profile Algorithm
-
- Wavelet domain analysis
- Segmentation
- Local estimation of expectation/standard-deviation pairs
- Clipping
Sensor������������ȷ��һ���ض�Sensor�Ƿ��������ղ�Ʒ����������Ҫָ�꣬��ƪ������Alessandro Foi��2007�귢�������ġ� Noise Measurement for Raw-Data of Digital Imaging Sensors by Automatic Segmentation of Nonuniform Targets���Ļ����������������Sensor���������Ŀ�ܣ�������ģ��Ҳ��Ŀǰ�г��ϳ�����оƬ��������(Noise Proflie)ģ��Ļ���ģ�ͣ�Alessandro Foi�Ƿ���Tampere��ѧ�о�ͼ��ȥ���������ģ�Ľ��ڣ���������̸���ķ����ܶ�Ѿ����ֻ�camera�еõ���Ӧ�á���ͬ��Imatest��ʹ�õ��Ļ��ڸ���Ҷ�任�ķ��� ISO 15739 �� Noise measurements����������ķ������ڼ�ͼ��ָ�����С�
����Sensor�Ƴɹ��յ����������Sensor�����سߴ�Խ��ԽС�������ܹ����۵Ĺ�������Խ��Խ�٣��������Sensor�ɼ������ź�(Raw)����ȵ��½���ͬʱSensor������Ҳ������һ��ͼ����������������ĸ�˹����������˶�Sensor���ɼ�ͼ���źŵ���������ȷ��ģ���ں�����ͼ����������ʮ����Ҫ�ġ�
Poissonian-Gaussian Modeling
�ο���CMOSͼ�����е�������Դ������һ���ж�CMOS Sensor��������Դ�ķ���������֪��Sensor�ɼ�������Raw���ݵ�������Ҫ�������Dz���������˹�����������������������ǰ����������������������Ĺ۲�ģ�������±�ʾ��
z(x)=y(x)+��(y(x))��(x)(1)z(x)=y(x)+\sigma(y(x)) \xi(x)\tag{1} z(x)=y(x)+��(y(x))��(x)(1)
����x��Xx\in Xx��X��ʾ�������꣬zzzΪ��ǰ�㱻����Ӱ���Ĺ۲�����ֵ��yyyΪ��ǰ�㲻������Ӱ���ʵ������ֵ����(x)\xi(x)��(x)��ʾ��ֵΪ0������Ϊ1�������������\sigma��Ϊyyy�ĺ�������ʾ�����ı�����ʵ������ֵ�仯����(y(x))��(x)\sigma(y(x)) \xi(x)��(y(x))��(x)��ʾRaw���ݵ������Ǿ�ֵΪ0��������ʵ������ֵ�仯�Ķ��仯��������������Խ�Sensor������ģ�Ϳ�����һ���췽��ĸ�˹����( Heteroskedastic Normal)���ڽ��������������н�ʹ��E?{?}\operatorname{E}\{\cdot\}E{
?}��ʾ�����������ѧ������var?{?}��std?{?}\operatorname{var}\{\cdot\}��\operatorname{std}\{\cdot\}var{
?}��std{
?}�ֱ��ʾ��������ķ�����������E{��(x)}=0E\{\xi(x)\}=0E{
��(x)}=0������E{z(x)}=y(x)E\{z(x)\}=y(x)E{
z(x)}=y(x)��ԭʼ�źſ��Ա������������źŵ��������������źŵķ�����۲��źš�ԭʼ�źż�Ĺ�ϵ���£�
std{z(x)}=��{y(x)}=��(E{z(x)})(2)std\{z(x)\}=\sigma\{y(x)\}=\sigma(E\{z(x)\})\tag{2} std{
z(x)}=��{
y(x)}=��(E{
z(x)})(2)
Sensor���еIJ���������Դ����ɢ������������������˹������Դ������������λ�������������������Խ�����������������������������֣��ֱ�����p����g\eta_{p}��\eta_{g}��p?����g?��ʾ���£�
��(y(x))��(x)=��p(y(x))+��g(x)(3)\sigma(y(x)) \xi(x)=\eta_{\mathrm{p}}(y(x))+\eta_{\mathrm{g}}(x)\tag{3} ��(y(x))��(x)=��p?(y(x))+��g?(x)(3)
��(y(x)+��p(y(x)))?P(��y(x)),��g(x)?N(0,b)(4)\chi\left(y(x)+\eta_{\mathrm{p}}(y(x))\right) \sim \mathcal{P}(\chi y(x)), \quad \eta_{\mathrm{g}}(x) \sim \mathcal{N}(0, b)\tag{4} ��(y(x)+��p?(y(x)))?P(��y(x)),��g?(x)?N(0,b)(4)
����P\mathcal{P}P��ʾ���ɷֲ���N\mathcal{N}N��ʾ��˹�ֲ����֣�0��b��0\chi��0��b��0����0��b��0�ֱ�Ϊ�߶Ȳ��������ڲ��ɷֲ��ķ������ֵ��ȣ����У�
E{��(y(x)+��p(y(x)))}=var?{��(y(x)+��p(y(x)))}=��y(x)(5)E\left\{\chi\left(y(x)+\eta_{\mathrm{p}}(y(x))\right)\right\}=\operatorname{var}\left\{\chi\left(y(x)+\eta_{\mathrm{p}}(y(x))\right)\right\}=\chi y(x)\tag{5} E{
��(y(x)+��p?(y(x)))}=var{
��(y(x)+��p?(y(x)))}=��y(x)(5)
������var?{��(y(x)+��p(y(x)))}=��2var{��p(y(x))}=��y(x)\operatorname{var}\left\{\chi\left(y(x)+\eta_{\mathrm{p}}(y(x))\right)\right\}=\chi ^{2}var\{\eta_{p}(y(x))\}=\chi y(x)var{
��(y(x)+��p?(y(x)))}=��2var{
��p?(y(x))}=��y(x)������var?{��p(y(x))}=y(x)/��\operatorname{var}\left\{\eta_{\mathrm{p}}(y(x))\right\}=y(x) / \chivar{
��p?(y(x))}=y(x)/����E{��p(y(x))}=0E\left\{\eta_{\mathrm{p}}(y(x))\right\}=0E{
��p?(y(x))}=0����˲��������ķ�����y(x)y(x)y(x)���仯����Ϊ��
var?{��p(y(x))}=ay(x);a=��?1(6)\operatorname{var}\left\{\eta_{\mathrm{p}}(y(x))\right\}=a y(x);a=\chi^{-1}\tag{6} var{
��p?(y(x))}=ay(x);a=��?1(6)
���ʽ(1)�е��������ֿ��������±�ʾ��
��2(y(x))=ay(x)+b(7)\sigma^{2}(y(x))=a y(x)+b\tag{7} ��2(y(x))=ay(x)+b(7)
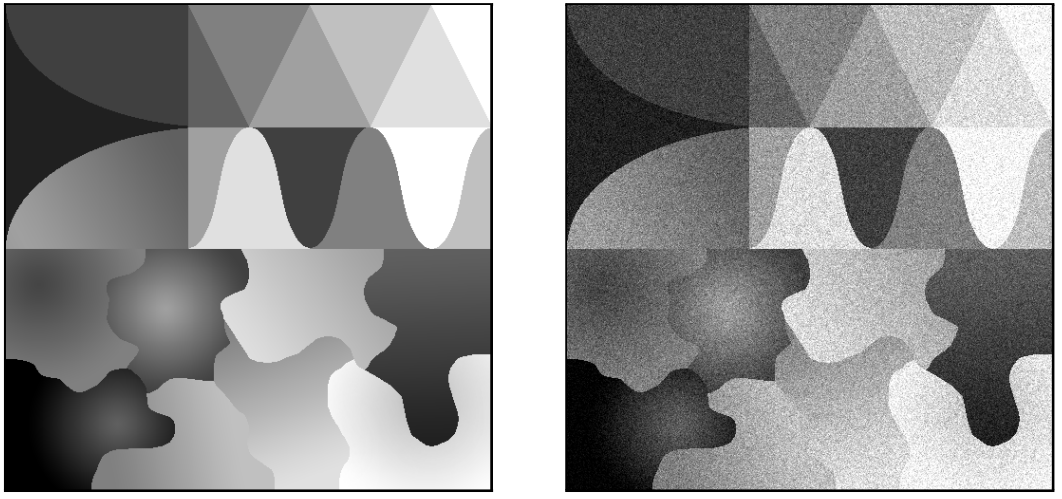
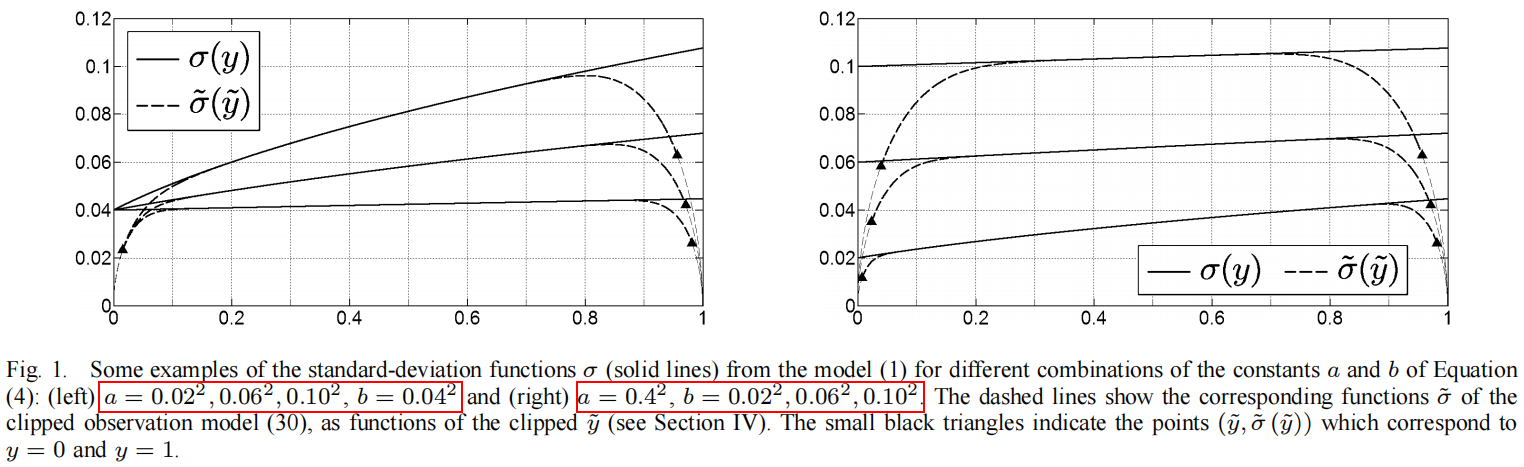
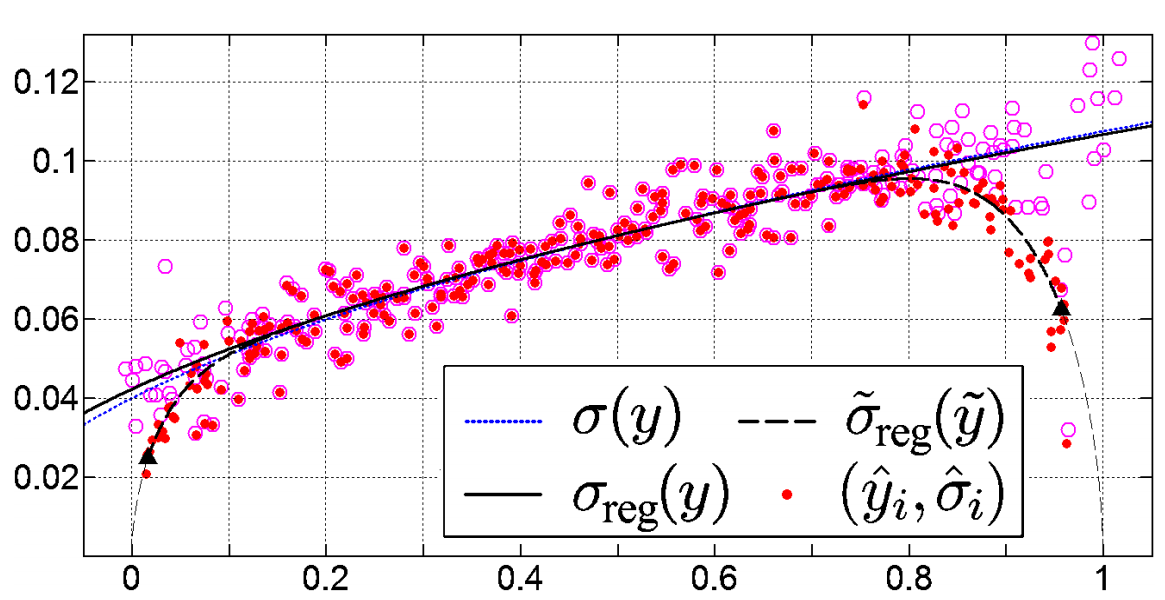
��ͼΪ��ԭͼyyy��������������������������b\alpha��b����bȡ��ֵͬʱ�����ͨ�����ķ����궨�������ź����������������Ĺ�ϵʾ��ͼ������ʵ��Ϊ��������ʱ�����������ģ�ͣ���Ӧ�������DZ��ķ����Ը������ı궨���������β���˳��ֵIJ�һ����������β���˵�����ֵ���������ź�����׳���С��0���ߴ���255����������ֱ�Clip��0��255��ɵ�(��ͼ������һ����Ҫ��Clip��ԭ���ǣ�ϣ��������ͼ�����ݵĻҶ�ֵ��Χ�̶���8bit��10bit��12bit�ķ�Χ�ڣ��Խ�ʡ���㡢�洢����Դ)��
Ϊ�˸���һ���ļ�����ģ�ͣ��ø�˹�ֲ�����һ�����Ʋ��ɷֲ�������
P(��)��N(��,��)\mathcal{P}(\lambda) \approx \mathcal{N}(\lambda, \lambda) P(��)��N(��,��)
����\lambda���㹻��ʱ�����Խ����ɷֲ��������췽��ĸ�˹�ֲ�����ʱ����-��˹�ֲ�������ģ�Ϳ��Խ�һ����Ϊ��
��(y(x))��(x)=ay(x)+b��(x)?��h(y(x))(8)\sigma(y(x)) \xi(x)=\sqrt{a y(x)+b} \xi(x) \simeq \eta_{\mathrm{h}}(y(x))\tag{8} ��(y(x))��(x)=ay(x)+b?��(x)?��h?(y(x))(8)
������h(x)?N(0,ay(x)+b)\eta_{\mathrm{h}}(x) \sim \mathcal{N}(0, a y(x)+b)��h?(x)?N(0,ay(x)+b)��
The Noise Profile Algorithm
Wavelet domain analysis
ͨ������£����Dz�����ֱ�ӻ�ȡ(��,y)(\sigma,y)(��,y)�����ݶ������ʽ(8)��ʾ����ģ�͵IJ�����,b\alpha,b��,b����С���ֽ�ķ�ʽ��ͼ��ֽ�Ϊ��Ƶ����zwappz^{wapp}zwapp����Ƶ����zwdetz^{wdet}zwdet�����е�Ƶ���ְ����˴ֵ�ԭʼ�źţ���Ƶ���ְ����˴ֵ������źţ�������ѡ��ֲ����ԽϺõ�DB3С����ΪС�����������ֽ�������£�
zwdet =��2(z?��)zwapp =��2(z?��)z^{\text {wdet }}=\downarrow_{2}(z \circledast \psi)\\ z^{\text {wapp }}=\downarrow_{2}(z \circledast \varphi) zwdet =��2?(z?��)zwapp =��2?(z?��)
����
��=��1?��1T��=��1?��1T\psi=\psi_{1} \circledast\psi_{1}^{T}\\ \varphi=\varphi_{1} \circledast \varphi_{1}^{T} ��=��1??��1T?��=��1??��1T?
��1=[0.0350.085?0.135?0.4600.807?0.333]��1=[0.025?0.060?0.0950.3250.5710.235].\begin{aligned} &\psi_{1}=\left[\begin{array}{llllll} 0.035 & 0.085 & -0.135 & -0.460 & 0.807 & -0.333 \end{array}\right] \\ &\varphi_{1}=\left[\begin{array}{llllll} 0.025 & -0.060 & -0.095 & 0.325 & 0.571 & 0.235 \end{array}\right] . \end{aligned} ?��1?=[0.035?0.085??0.135??0.460?0.807??0.333?]��1?=[0.025??0.060??0.095?0.325?0.571?0.235?].?
���ϣ���С���ֽ��Ŀ���������½��ƣ�
std?{zwdet }=��2(std?{z?��})=��2(var?{z}?��2)?��2(std?{z}�Φס�2)=��2(std?{z})=��2(��(y))=��(��2y)=��(��2(y�Ʀ�))?��(��2(y?��))=��(E{zwapp })(9)\begin{aligned} \operatorname{std}\left\{z^{\text {wdet }}\right\} &=\downarrow_{2}(\operatorname{std}\{z \circledast \psi\})=\downarrow_{2}\left(\sqrt{\operatorname{var}\{z\} \circledast \psi^{2}}\right) \\ & \simeq \downarrow_{2}\left(\operatorname{std}\{z\}\|\psi\|_{2}\right)=\downarrow_{2}(\operatorname{std}\{z\})\\ &=\downarrow_{2}(\sigma(y))=\sigma\left(\downarrow_{2} y\right)=\sigma\left(\downarrow_{2}\left(y \sum \varphi\right)\right) \\ & \simeq \sigma\left(\downarrow_{2}(y \circledast \varphi)\right)=\sigma\left(E\left\{z^{\text {wapp }}\right\}\right) \end{aligned}\tag{9} std{
zwdet }?=��2?(std{
z?��})=��2?(var{
z}?��2?)?��2?(std{
z}������2?)=��2?(std{
z})=��2?(��(y))=��(��2?y)=��(��2?(y����))?��(��2?(y?��))=��(E{
zwapp })?(9)
Segmentation
�������������ĸ�Ƶ��Ϣzwdetz^{wdet}zwdet�л������˴����˱�Ե��Ϣ��Ϊ�˱����Ե��Ϣ�������������̵ĸ��ţ�����Ե������Ե��������ͳ������֮�⡣���ȶ�zwappz^{wapp}zwapp�ٴν��е�ͨ�˲����ٴ��˲����еĸ�Ƶ�ɷ֣�
zsmo=zwapp??;?��0and ��?��1=1(10)z^{\mathrm{smo}}=z^{\mathrm{wapp}} \circledast \varpi;\varpi \geq 0 \text { and }\|\varpi\|_{1}=1\tag{10} zsmo=zwapp??;?��0 and ��?��1?=1(10)
���ԭʼ�ź�yyy����ƽ̹������ô������Ϊzsmo��E{zwapp}�֡�2yz^{smo}��E\{z^{wapp}\}��\downarrow_{2} yzsmo��E{
zwapp}����2?y��Ȼ����ƽ�����zwdetz^{wdet}zwdet����ͼ��ľֲ����
s=��2�Ozwdet�O??(11)s=\sqrt{\frac{\pi}{2}}\left|z^{\mathrm{wdet}}\right| \circledast \varpi\tag{11} s=2��??�O�O?zwdet�O�O???(11)
ͨ���Ƚ�zappz^{app}zapp���ݶ������ϵ�ͼ��ľֲ��������ж�ͼ���г�����ƽ̹����ĵ㼯��
Xsmo={x�ʡ�2X::�O?(��(zwapp ))(x)�O+�O��(zwapp )(x)�O<��?s(x)}��(zwapp )=?2medfilt (zwapp )(11)X^{\mathrm{smo}}=\left\{x \in \downarrow_{2} X:\right. \left.:\left|\nabla\left(\Lambda\left(z^{\text {wapp }}\right)\right)(x)\right|+\left|\Lambda\left(z^{\text {wapp }}\right)(x)\right|<\tau \cdot s(x)\right\}\\ \Lambda\left(z^{\text {wapp }}\right)=\nabla^{2} \text { medfilt }\left(z^{\text {wapp }}\right)\tag{11} Xsmo={
x����2?X::�O?(��(zwapp ))(x)�O+�O��(zwapp )(x)�O<��?s(x)}��(zwapp )=?2 medfilt (zwapp )(11)
����?��?2\nabla��\nabla^{2}?��?2�ֱ�Ϊ�ݶ��㷨��������˹���ӣ�medfiltΪ3��33��33��3����ֵ�˲�����>0\tau>0��>0���ܵ���˵��ͨ�������ݶ����Ӻ�������˹���Ӳ���ֲ�������бȽ�����ȡ��Ե��Ϣ��ȥ��ͼ��ı�Ե������ƽ�������൱�����Ƿ�ƽ��Ϊ���ݶ�ͼ������ֵ��������ٽ�ƽ����������ص㣬����������ֵ����Ϊ���ɸ����غϵ�����
Si={x��Xsmo:zsmo(x)��[ui?��i/2,ui+��i/2)}(12)S_{i}=\left\{x \in X^{\mathrm{smo}}: z^{\mathrm{smo}}(x) \in\left[u_{i}-\Delta_{i} / 2, u_{i}+\Delta_{i} / 2\right)\right\}\tag{12} Si?={
x��Xsmo:zsmo(x)��[ui??��i?/2,ui?+��i?/2)}(12)
Local estimation of expectation/standard-deviation pairs
��������ָ������������������ԭʼ�źš���������Ĺ��ƣ�
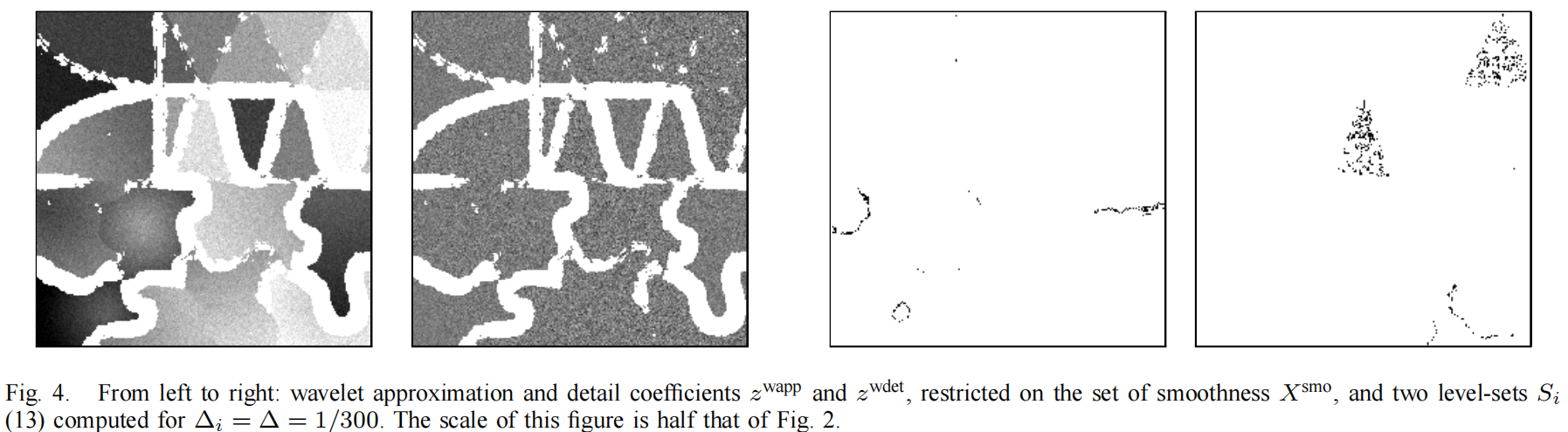
y^i=1ni��j=1nizwapp (xj),{xj}j=1ni=Si��^i=1��ni��j=1ni(zwdet(xj)?z��iwdet)2ni?1(13)\hat{y}_{i}=\frac{1}{n_{i}} \sum_{j=1}^{n_{i}} z^{\text {wapp }}\left(x_{j}\right), \quad\left\{x_{j}\right\}_{j=1}^{n_{i}}=S_{i}\\ \hat{\sigma}_{i}=\frac{1}{\kappa_{n_{i}}} \sqrt{\frac{\sum_{j=1}^{n_{i}}\left(z^{\mathrm{wdet}}\left(x_{j}\right)-\bar{z}_{i}^{\mathrm{wdet}}\right)^{2}}{n_{i}-1}}\tag{13} y^?i?=ni?1?j=1��ni??zwapp (xj?),{
xj?}j=1ni??=Si?��^i?=��ni??1?ni??1��j=1ni??(zwdet(xj?)?z��iwdet?)2??(13)
����
z��iwdet =1ni��j=1nizwdet (xj)��n=2n?1��(n2)��(n?12)=1?14n?732n2+O(1n3)(14)\bar{z}_{i}^{\text {wdet }}=\frac{1}{n_{i}} \sum_{j=1}^{n_{i}} z^{\text {wdet }}\left(x_{j}\right)\\ \kappa_{n}=\sqrt{\frac{2}{n-1}} \frac{\Gamma\left(\frac{n}{2}\right)}{\Gamma\left(\frac{n-1}{2}\right)}=1-\frac{1}{4 n}-\frac{7}{32 n^{2}}+O\left(\frac{1}{n^{3}}\right)\tag{14} z��iwdet ?=ni?1?j=1��ni??zwdet (xj?)��n?=n?12??��(2n?1?)��(2n?)?=1?4n1??32n27?+O(n31?)(14)
��n\kappa_{n}��n?�������ɶ�Ϊn?1n-1n?1�Ŀ����ֲ������ݴ������������ҽ���n����n\to \inftyn����ʱ��y^��y����^����\hat{y}\to y��\hat{\sigma} \to \sigmay^?��y����^�������ٸ������ļ��������������������������ĺ͵ķֲ�����̬�ֲ�Ϊ���ޣ�
var?{y^i}=��2(yi)ci;var?{��^i}=��2(yi)dici=�Φա�22ni;di=1?��ni2��ni2=12ni+58ni2+O(1ni3)(15)\operatorname{var}\left\{\hat{y}_{i}\right\}=\sigma^{2}\left(y_{i}\right) c_{i};\operatorname{var}\left\{\hat{\sigma}_{i}\right\}=\sigma^{2}\left(y_{i}\right) d_{i}\\ c_{i}=\frac{\|\varphi\|_{2}^{2}}{n_{i}};d_{i}=\frac{1-\kappa_{n_{i}}^{2}}{\kappa_{n_{i}}^{2}}=\frac{1}{2 n_{i}}+\frac{5}{8 n_{i}^{2}}+O\left(\frac{1}{n_{i}^{3}}\right)\tag{15} var{
y^?i?}=��2(yi?)ci?;var{
��^i?}=��2(yi?)di?ci?=ni?������22??;di?=��ni?2?1?��ni?2??=2ni?1?+8ni2?5?+O(ni3?1?)(15)
����
y^i?N(yi,��2(yi)ci);��^i?N(��(yi),��2(yi)di)(16)\hat{y}_{i} \sim \mathcal{N}\left(y_{i}, \sigma^{2}\left(y_{i}\right) c_{i}\right);\hat{\sigma}_{i} \sim \mathcal{N}\left(\sigma\left(y_{i}\right), \sigma^{2}\left(y_{i}\right) d_{i}\right)\tag{16} y^?i??N(yi?,��2(yi?)ci?);��^i??N(��(yi?),��2(yi?)di?)(16)
����ٸ��ݹ������������-�����������յ�����ģ�ͣ�ѡ����õ���С���˷����ɣ�
��2(y)=ay+b\sigma^{2}(y)=a y+b ��2(y)=ay+b
���ϼ��DZ�������������������㷨���������ͼ��

Clipping
��ƪ���µ�һ��ͻ�������Ƿ�����������������Clipping������ģ�͵�Ӱ�죬���ȣ����ǽ�Sensor�ɼ�������Raw���ݵĶ�̬��Χnormalize��[0,1]֮�䣬��Clipping�����¶��壺
z~(x)=max?(0,min?(z(x),1))(17)\tilde{z}(x)=\max (0, \min (z(x), 1))\tag{17} z~(x)=max(0,min(z(x),1))(17)
����zzzΪ�����źţ���Clipping����ĺ����źŵ�����Ϊ��
y~(x)=E{z~(x)}(18)\tilde{y}(x)=E\{\tilde{z}(x)\}\tag{18} y~?(x)=E{
z~(x)}(18)
����ʱ������ģ�ͱ�ʾΪ��
z~(x)=y~(x)+��~(y~(x))��~(x)(19)\tilde{z}(x)=\tilde{y}(x)+\tilde{\sigma}(\tilde{y}(x)) \tilde{\xi}(x)\tag{19} z~(x)=y~?(x)+��~(y~?(x))��~?(x)(19)
����������ģ����ͬE{��~(x)}=0,var?{��~(x)}=1E\{\tilde{\xi}(x)\}=0, \operatorname{var}\{\tilde{\xi}(x)\}=1E{
��~?(x)}=0,var{
��~?(x)}=1��������~(y~(x))=std?{z~(x)}\tilde{\sigma}(\tilde{y}(x))=\operatorname{std}\{\tilde{z}(x)\}��~(y~?(x))=std{
z~(x)}��������Ҫ�ر�ע�����Clipping�����������û��Clipping�����ݼ�������²��죺
y~(x)=E{z~(x)}��E{z(x)}=y(x)(y~(x))=std?{z~(x)}��std?{z(x)}=��(y(x))(20)\tilde{y}(x)=E\{\tilde{z}(x)\} \neq E\{z(x)\}=y(x)\\ (\tilde{y}(x))=\operatorname{std}\{\tilde{z}(x)\} \neq \operatorname{std}\{z(x)\}=\sigma(y(x))\tag{20} y~?(x)=E{
z~(x)}??=E{
z(x)}=y(x)(y~?(x))=std{
z~(x)}??=std{
z(x)}=��(y(x))(20)
�ر���Ҫע����ǣ���ʹvar?{��~(x)}=var?{��(x)}=1\operatorname{var}\{\tilde{\xi}(x)\}=\operatorname{var}\{\xi(x)\}=1var{
��~?(x)}=var{
��(x)}=1����~(x)\tilde{\xi}(x)��~?(x)����(x)\xi(x)��(x)Ҳ������ͬһ�ֲ����ٻع������������Fig 1�е����߲��֣���һ������ԭ�ֲ����߳��ֽϴ�����ԭ�����Clipping��ɵģ��ɴ�Ҳ����������֪����ClippingӰ����Ϊ���ص���ԭ�źŽӽ�0��1�����ɴˣ����ǵó�һ�������Ե��ܽ
�ٵ�ԭʼ�ź�y��0y\to0y��0���������������췽�����̬�ֲ�����z<0z<0z<0�ĸ���Զ����z>1z>1z>1����ʱ������ClippingΪz~=max(0,z)\tilde{z}=max(0,z)z~=max(0,z)
�ڵ�ԭʼ�ź�y��1y\to1y��1���������������췽�����̬�ֲ�����z>1z>1z>1�ĸ���Զ����z<0z<0z<0����ʱ������ClippingΪz~=min(z,1)\tilde{z}=min(z,1)z~=min(z,1)
�۵�ԭʼ�ź�0<<y<<10<<y<<10<<y<<1ʱ��������Ϊ����Clipping�ĸ��ʺ�С��������Ϊ0
��Ԣ١�������Clipping������Ȳ��ط���Clipping��0����������ȣ�����z~=max(0,z)\tilde{z}=max(0,z)z~=max(0,z)�����ʱ�۲����ݵ�����Ϊ��
E{z~}��E{z}=y(21)E\{\tilde{z}\} \geq E\{z\}=y\tag{21} E{
z~}��E{
z}=y(21)
�������źſ����������������?N(��,1)\nu \sim \mathcal{N}(\mu, 1)��?N(��,1)����۲�ֵv~=max(v,0)\tilde{v}=max(v,0)v~=max(v,0)�����ʱv~\tilde{v}v~�ĸ����ܶȺ���Ϊ��
f��~(t)={?(t?��)+��(?��)��0(t)t��00t<0(22)f_{\tilde{\nu}}(t)= \begin{cases}\phi(t-\mu)+\Phi(-\mu) \delta_{0}(t) & t \geq 0 \\ 0 & t<0\end{cases}\tag{22} f��~?(t)={
?(t?��)+��(?��)��0?(t)0?t��0t<0?(22)
������0\delta_{0}��0?Ϊ�����˺�����?\phi?ΪN(0,1)\mathcal{N}(0,1)N(0,1)�ĸ����ܶȺ�������\Phi��ΪN(0,1)\mathcal{N}(0,1)N(0,1)�ۻ��ֲ�������f��~(t)f_{\tilde{\nu}}(t)f��~?(t)�ľ��������ʽ���£�
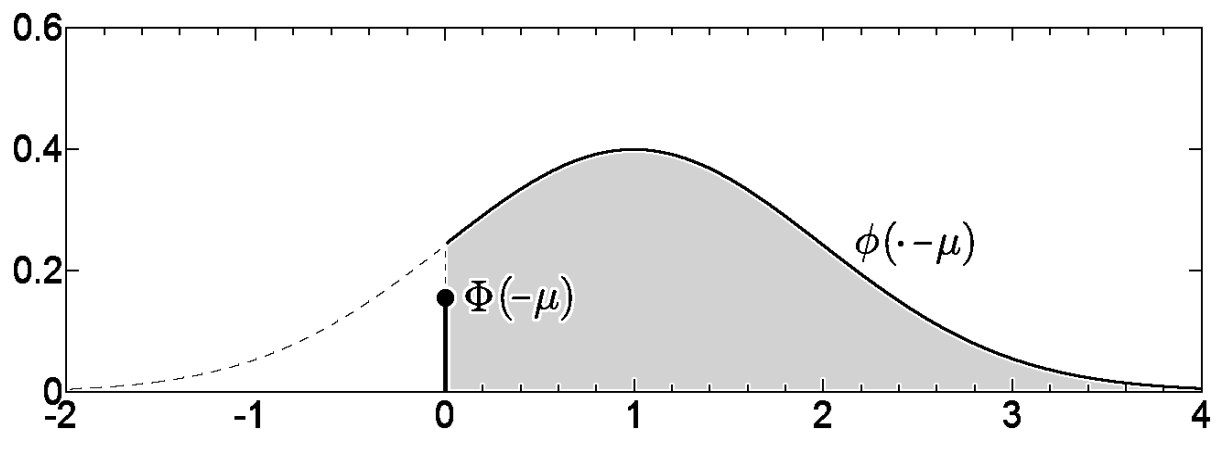
��ʱ����۲�ֵv~\tilde{v}v~�������뷽�����£�
E{��~}=��(��)��+?(��)var?{��~}=��(��)+?(��)��??2(��)++��(��)��(��?��(��)��?2?(��))(23)\begin{aligned} E\{\tilde{\nu}\} &=\Phi(\mu) \mu+\phi(\mu) \\ \operatorname{var}\{\tilde{\nu}\} &=\Phi(\mu)+\phi(\mu) \mu-\phi^{2}(\mu)++\Phi(\mu) \mu(\mu-\Phi(\mu) \mu-2 \phi(\mu)) \end{aligned}\tag{23} E{
��~}var{
��~}?=��(��)��+?(��)=��(��)+?(��)��??2(��)++��(��)��(��?��(��)��?2?(��))?(23)
������=E{��}\mu=E\{\nu\}��=E{
��}����ʱ�۲�����v~\tilde{v}v~��������E{v}E\{v\}E{
v}��Ĺ�ϵ��ʾΪEm\mathcal{E}_{m}Em?���۲�����v~\tilde{v}v~�ķ�����E{v}E\{v\}E{
v}��Ĺ�ϵ��ʾΪSm\mathcal{S}_{m}Sm?������ͼ��
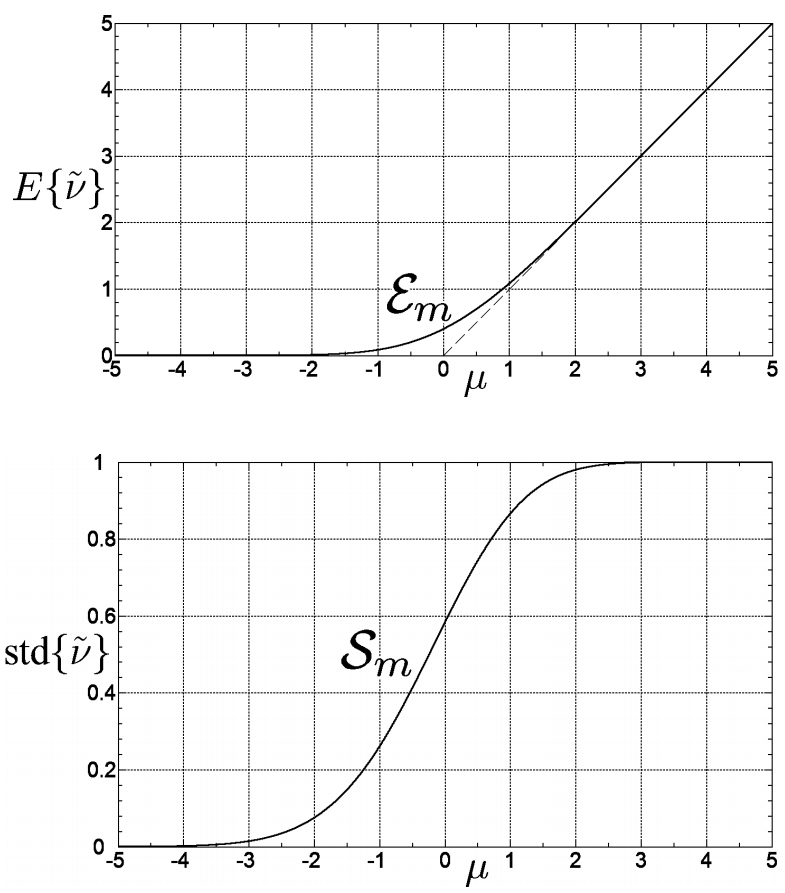
������\mu��������E{v~}E\{\tilde{v}\}E{
v~}����Ϊ�������̡�?��\mu \rightarrow-\infty����?��ʱ��E{v~}��0��std{v~}��0E\{\tilde{v}\} \to0��std\{\tilde{v}\}\to0E{
v~}��0��std{
v~}��0�����̡�+��\mu \rightarrow+\infty����+��ʱ��E{v~}���̣�std{v~}��1E\{\tilde{v}\} \to \mu��std\{\tilde{v}\}\to1E{
v~}������std{
v~}��1����������չΪ���췽��������ɵ�Clipping��ԭʼ�źż�Ĺ�Ϊ��
y~(x)=E{z~(x)}=��(y)E{��~}std?{z~}=��(y)std?{��~}(24)\tilde{y}(x)=E\{\tilde{z}(x)\}=\sigma(y) E\{\tilde{\nu}\}\\ \operatorname{std}\{\tilde{z}\}=\sigma(y) \operatorname{std}\{\tilde{\nu}\}\tag{24} y~?(x)=E{
z~(x)}=��(y)E{
��~}std{
z~}=��(y)std{
��~}(24)
���Լؽ������췽����̬�ֲ����������z?N(y,��2(y))z \sim \mathcal{N}\left(y, \sigma^{2}(y)\right)z?N(y,��2(y))���±���Ϊһ������Ϊ1���������z��(y)?N(y��(y),1)\frac{z}{\sigma(y)} \sim \mathcal{N}\left(\frac{y}{\sigma(y)}, 1\right)��(y)z??N(��(y)y?,1)���ɴˣ����Խ�y~����~\tilde{y}��\tilde{\sigma}y~?����~��y����y��\sigmay������ϵ������
y~=��(y)Em(y��(y))��~(y~)=��(y)Sm(y��(y))(25)\begin{aligned} \tilde{y} &=\sigma(y) \mathcal{E}_{m}\left(\frac{y}{\sigma(y)}\right)\\ \tilde{\sigma}(\tilde{y}) &=\sigma(y) \mathcal{S}_{m}\left(\frac{y}{\sigma(y)}\right) \end{aligned}\tag{25} y~?��~(y~?)?=��(y)Em?(��(y)y?)=��(y)Sm?(��(y)y?)?(25)
�����Se\mathcal{S}_{e}Se?����ʾ��ͼ��Em��Sm\mathcal{E}_{m}��\mathcal{S}_{m}Em?��Sm?��Ĺ�ϵ������ͼ��
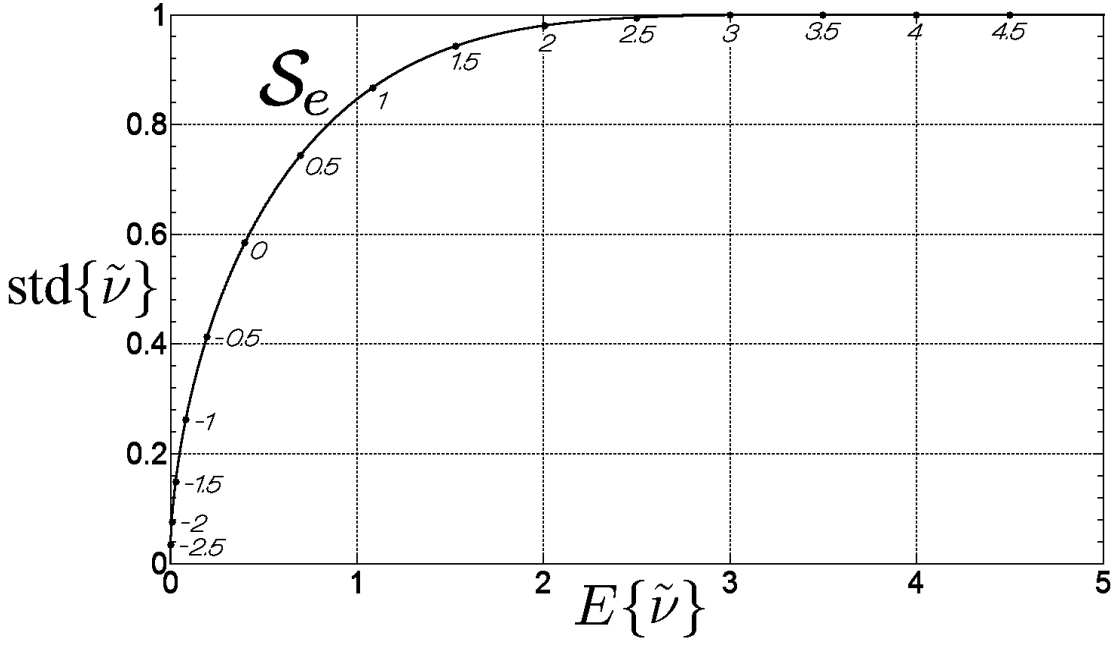
��ɽ�y~����~\tilde{y}��\tilde{\sigma}y~?����~��ϵ������
��~(y~)=��(y)Se(y~��(y))(26)\tilde{\sigma}(\tilde{y})=\sigma(y) \mathcal{S}_{e}\left(\frac{\tilde{y}}{\sigma(y)}\right)\tag{26} ��~(y~?)=��(y)Se?(��(y)y~??)(26)
����������Clipping��1�����������̬�ֲ��ĶԳ��ԣ����Խ�Clipping��1�����������µȼۣ�
y?1?y,z?1?zy~?1?y~,z~?1?z~\begin{array}{l} y\quad\longleftrightarrow \quad 1-y, \quad z \longleftrightarrow 1-z\\ \tilde y\quad\longleftrightarrow \quad 1-\tilde y, \quad \tilde z \longleftrightarrow 1-\tilde z\\ \end{array} y?1?y,z?1?zy~??1?y~?,z~?1?z~?
����
y~=1?��(y)Em(1?y��(y))��~(y~)=��(y)Sm(1?y��(y))=��(y)Se(1?y~��(y))\begin{aligned} \tilde{y} &=1-\sigma(y) \mathcal{E}_{m}\left(\frac{1-y}{\sigma(y)}\right) \\ \tilde{\sigma}(\tilde{y}) &=\sigma(y) \mathcal{S}_{m}\left(\frac{1-y}{\sigma(y)}\right)=\sigma(y) \mathcal{S}_{e}\left(\frac{1-\tilde{y}}{\sigma(y)}\right) \end{aligned} y~?��~(y~?)?=1?��(y)Em?(��(y)1?y?)=��(y)Sm?(��(y)1?y?)=��(y)Se?(��(y)1?y~??)?
�ɴ˿��Դ�Clipping�����ݵķֲ��лָ���ԭ�����ֲ�����ָ�������£�
�����ἰ�Ķ�Clipping���ݵ�У��������ȻӦ���ڶ������ֲ���У�����У��˷���Ҳ�ǽ�Clipping���ݸ�ԭ�ķ���������ֱ������Clipping���ݵĸ�ԭ���С�