YOLO算法
- 引言
- 关于 YOLO
- 理解“目标识别任务”及“Anchor Boxes”
-
- 目标识别任务
- Anchor Boxes
- 明确数据格式
- 探索数据格式
-
- 下载数据
- 探索数据
- 调整数据格式
- 创建模型
- 训练 Model
- 总结
引言
YOLO 算法是目前广泛应用的目标识别算法, 也是学习计算机视觉必须弄懂得算法, 但是阅读完 YOLO 算法论文之后, 也不一定说能头脑清晰的实现一个自己的版本, 因为其中有许多细节导致这个算法似乎变成有点困难。 但是实际上算法是简单, 只是要在理解论文的基础上, 研究作者公布源码便可以尝试自己实现。 这里研究的是 YAD2K Tensorflow 和 Keras 的实现版本( python3.6)。 将 YAD2K 克隆到本地然后进行改写, 运行。
git clone https://github.com/allanzelener/YAD2K.git
则会在当前目录下生成 yad2k , 然后再进行下面的工作, 一些信息在 github 上有, 例如预训练模型的获取以及 yolo.cfg , 需要自行查看。
关于 YOLO
https://pjreddie.com/publications/ 这是 YOLO 算法作者的个人网站, 在其中可以找到 YOLO v1~v3 的论文。 此文章探究的是YOLOv2, 所以有必要阅读 YOLOv1 及 YOLOv2 。 这里会以我的理解简单的对 YOLO 进行解说再进行后面的工作, 但是无论如何都必须先阅读 YOLO 论文, 理解 YOLO 的思想是研究源码的前提, 阅读时特别注意算法思想以及目标函数。 所以是可以阅读完 YOLO 论文后然后选择一个 YOLO 算法的实现进行研究便可, 只是我在这里让它更像一个教程。
YOLO 算法首先使用卷积神经网络训练一个分类器(YOLOv2 为 9000),所以在训练分类器时的输出层为 FC 层 (其它都为卷积层), YOLO 使用 darknet (简单理解成为一种网络结构)来进行训练。 将在预训练完成后的 darknet 由分类任务转变成目标识别任务 (即为迁移学习, 预先实现分类任务使得目标识别任务的训练效果更佳) 。
理解“目标识别任务”及“Anchor Boxes”
目标识别任务
目标识别任务比分类任务更加复杂, 要完成的任务是识别图片中的对象并确定对象所处的位置。 所以预先在 darknet 上训练一个分类器再转移到目标识别任务时会有更好的效果。
Anchor Boxes
根据 YOLO 算法的思想会将图片分成 13 * 13 的网格, 每个网格负责中心(x, y)落在自己的区域内的对象识别, 但是由于可能存在多个对象的 (x, y)可能落在同一个网格中,所以引入了 Anchor Boxes 。 预先定义5个长宽不同的 Anchor Boxes , 通过计算对象和 Anchor Boxes 的 IOU 确定哪个 Anchor Box 来负责这个对象。 因此如果有 5 个 Anchor Boxes 那么一个网格最多可以同时识别出5个对象, 那么一张图片最多可以识别 13 * 13 * 5 = 845 个对象。
明确数据格式
阅读论文便可以知道 inputs 即 X 的 shape 应为 (None, 416, 416, 3) , 但是 labels 即 Y 的格式可能还是有点模糊, 不过我们却可以明确 YOLO 的输出的 shape 为 (None, 13, 13, anchor_box_num * (5 + 9000))。 其中 anchor_box_num 为 anchor box 的个数, 5 + 9000 代表了 (p, x, y, w, h, c1, c2, …, c9000) (注: P 为有对象的概率, 论文中为 confidence)。 所以一种可能的实现就是将 labels 的 shape 也控制成这样, 这样就可以写出 YOLO_LOSS ,但是这样使用了另外一种方法, 后面注意便可。
探索数据格式
下载数据
这里的数据格式是指未经过我们处理的 images 以及 labels。 从网上下载不同的数据集之间的 labels 的格式可能不一样。 例如可以在 pascal VOC2007 的数据集, 但是这里尽量将问题简单化, 理解之后可以自行将 VOC 2007 的数据格式转成目标格式。 这里使用 YAD2K 中使用到的数据集 underwater 。 简单的:
git clone https://github.com/alecGraves/DATA.git
cd data
python package_dataset.py
会生成 my_dataset.npz 的数据文件, 改名为 underwater_data.npz 。 其中也有用到的 underwater_classes.txt , 类别的个数。然后将 underwater_data.npz 和 underwater_classes.txt 放到 data 文件夹并剪切到 yad2k 中, 结果文件目录结构如下:
data 中有 underwater_classes.txt 和 underwater_data.npz 文件。
探索数据
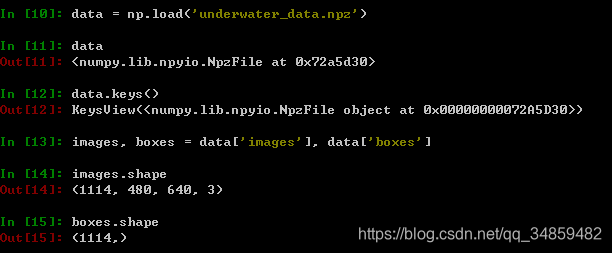
发现图片都是 480 * 640 * 3 的,表明我们需要将图片转换成 416 * 416 *3 , 而 labels 则是(1114, )明显代表的是样本的个数。 再次探索如下:

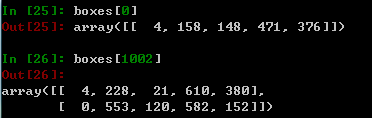
其中数据的格式为 (class, x_min, y_min, x_max, y_max) 。而 shape[0] 表示这个图片中有多少个对象, 由此可以知 images[1002] 中有两个对象, 这里就不贴太多图片了。
到现在可以知道 images 的格式转成 (416, 416, 3) 这个还是比较直观和简单的。 但是 boxes 的 (1114, ) 转成 (1114, 13, 13, 5 * (5 + 6) )还是有点遥远(6为class的个数), 再进行数据格式转成前, 请确定理解 YOLO 的目标函数。

调整数据格式
从这里开始, 建议转到 jupyter notebook 实现, 然后先导入如下包:
import osimport matplotlib.pyplot as plt
import numpy as np
import PIL
import tensorflow as tf
from keras import backend as K
from keras.layers import Input, Lambda, Conv2D
from keras.models import load_model, Model
from keras.callbacks import TensorBoard, ModelCheckpoint, EarlyStoppingfrom yad2k.models.keras_yolo import (preprocess_true_boxes, yolo_body,yolo_eval, yolo_head, yolo_loss)
from yad2k.utils.draw_boxes import draw_boxes
由于数据处理部分较多, 这里整合成为一个类, 也贴出部分代码。
def __process_data(self, images, boxes):images = [PIL.Image.fromarray(i) for i in images]#保存图片原大小orig_size = np.array([images[0].width, images[0].height])orig_size = np.expand_dims(orig_size, axis=0)processed_images = [i.resize((416, 416), PIL.Image.BICUBIC) for i in images]processed_images = [np.array(image, dtype=np.float) for image in processed_images]processed_images = [image/255. for image in processed_images]# Get box parameters as x_center, y_center, box_width, box_height, class.boxes_xy = [0.5 * (box[:, 3:5] + box[:, 1:3]) for box in boxes]boxes_wh = [box[:, 3:5] - box[:, 1:3] for box in boxes]boxes_xy = [boxxy / orig_size for boxxy in boxes_xy]boxes_wh = [boxwh / orig_size for boxwh in boxes_wh]boxes = [np.concatenate((boxes_xy[i], boxes_wh[i], box[:, 0:1]), axis=1) for i, box in enumerate(boxes)]# 由于每个box的shape[0]不一样, 为方便调整为一样的 shapefor i, boxz in enumerate(boxes):if boxz.shape[0] < self.max_boxes:zero_padding = np.zeros( (self.max_boxes-boxz.shape[0], 5), dtype=np.float32)boxes[i] = np.vstack((boxz, zero_padding))return np.array(processed_images), np.array(boxes)
新的 shape 如下:

但是预处理还没有结束, 离 (None, 13, 13, 5*(5+6)) 还是有点多。 (None, 13, 13, 5*(5+6)) 是已经对象划分到包含中心的网格中以及分配了具有最大值得IOU的anchor box. 所以还需要再处理一次:
def __get_detector_mask(self, boxes, anchors):detectors_mask = []matching_true_boxes = []for i, box in enumerate(boxes):t_detectors_mask, t_matching_true_boxes = self.__preprocess_true_boxes(box, anchors, [416, 416])detectors_mask.append(t_detectors_mask)matching_true_boxes.append(t_matching_true_boxes)return np.array(detectors_mask), np.array(matching_true_boxes)
先看一下 detectors_mask、 matching_true_boxes 的 shape:

__preprocess_true_boxes() 是将 box 和 anchor 以及 grid 相关联的方法, 即将对象分配到对应 grid 和 anchor 中。matching_true_boxes 就是分配完成后的结果, shape[4]的解读为 ( x, y, w, h, class)。 至于 detectors_mask 则是计算在 grid 和 anchor 中是否出现了对象, 用于方便计算目标函数。 __preprocess_true_boxes() 的功能已经解读完毕,具体实现如下(由于较长, 在确定理解__get_detector_mask 的作用时, 可以暂时跳过这个详细部分, 直接进入一下部分):
def __preprocess_true_boxes(self, true_boxes, anchors, image_size):height, width = image_sizenum_anchors = len(anchors)# Downsampling factor of 5x 2-stride max_pools == 32.# TODO: Remove hardcoding of downscaling calculations.assert height % 32 == 0, 'Image sizes in YOLO_v2 must be multiples of 32.'assert width % 32 == 0, 'Image sizes in YOLO_v2 must be multiples of 32.'conv_height = height // 32conv_width = width // 32num_box_params = true_boxes.shape[1]detectors_mask = np.zeros((conv_height, conv_width, num_anchors, 1), dtype=np.float32)matching_true_boxes = np.zeros((conv_height, conv_width, num_anchors, num_box_params),dtype=np.float32)for box in true_boxes:# scale box to convolutional feature spatial dimensionsbox_class = box[4:5]box = box[0:4] * np.array([conv_width, conv_height, conv_width, conv_height])i = np.floor(box[1]).astype('int')j = np.floor(box[0]).astype('int')best_iou = 0best_anchor = 0for k, anchor in enumerate(anchors):# Find IOU between box shifted to origin and anchor box.box_maxes = box[2:4] / 2.box_mins = -box_maxesanchor_maxes = (anchor / 2.)anchor_mins = -anchor_maxesintersect_mins = np.maximum(box_mins, anchor_mins)intersect_maxes = np.minimum(box_maxes, anchor_maxes)intersect_wh = np.maximum(intersect_maxes - intersect_mins, 0.)intersect_area = intersect_wh[0] * intersect_wh[1]box_area = box[2] * box[3]anchor_area = anchor[0] * anchor[1]iou = intersect_area / (box_area + anchor_area - intersect_area)if iou > best_iou:best_iou = ioubest_anchor = kif best_iou > 0:detectors_mask[i, j, best_anchor] = 1adjusted_box = np.array([box[0] - j, box[1] - i,np.log(box[2] / anchors[best_anchor][0]),np.log(box[3] / anchors[best_anchor][1]), box_class],dtype=np.float32)matching_true_boxes[i, j, best_anchor] = adjusted_boxreturn detectors_mask, matching_true_boxes创建模型
经过上面的准备, 数据已经准备好,接着就是要创建 YOLO 的 model , 这些部分开始变得有点困难,但如果熟悉 keras 的话会有莫大的帮助。讲解将会在注释中给出。
def create_model(anchors, class_names, load_pretrained=True, freeze_body=True):detectors_mask_shape = (13, 13, 5, 1)matching_boxes_shape = (13, 13, 5, 5)# Create model input layers.image_input = Input(shape=(416, 416, 3))boxes_input = Input(shape=(3, 5))detectors_mask_input = Input(shape=detectors_mask_shape)matching_boxes_input = Input(shape=matching_boxes_shape)# Create model body.""" 这里的 Yolo_body 网络结构图在 https://github.com/allanzelener/YAD2K/blob/master/etc/yolo.png 中可以看到, 也有对应的 Yolo.cfg 参考。 跟 darkent 中 https://github.com/pjreddie/darknet/blob/master/cfg/yolov2.cfg 一致,是新的网络结构"""yolo_model = yolo_body(image_input, len(anchors), len(class_names))topless_yolo = Model(yolo_model.input, yolo_model.layers[-2].output)"""加载 pre-train-model (yolo.h5) 这里为了不覆盖而重新保存到 yolo_topless.h5 中"""if load_pretrained:# Save topless yolo:topless_yolo_path = os.path.join('model_data', 'yolo_topless.h5')if not os.path.exists(topless_yolo_path):print("CREATING TOPLESS WEIGHTS FILE")yolo_path = os.path.join('model_data', 'yolo.h5')model_body = load_model(yolo_path)model_body = Model(model_body.inputs, model_body.layers[-2].output)model_body.save_weights(topless_yolo_path)topless_yolo.load_weights(topless_yolo_path)if freeze_body:for layer in topless_yolo.layers:layer.trainable = False# 创建最后一个输出层并创建一个完成的 Yolo_modelfinal_layer = Conv2D(len(anchors)*(5+len(class_names)), (1, 1), activation='linear')(topless_yolo.output)model_body = Model(image_input, final_layer)"""这里其实是代替了 model.complie() 中给出了 Loss. 提前将目标函数写在这里, 然后传入 model 中。再到 model.complie() 时传入 loss={'yolo_loss': lambda y_true, y_pred: y_pred}这样做其实不太好, 有点混乱。 所以作者也弄了个 TODO: 期望用正式的 loss layer 来替代这个 Lambda关于 Lambda 的用法,请到 keras 中查阅。 yolo_loss 一定要看 YOLO 论文中的公式, 因为这也是根据论文中的写出来的。"""# Place model loss on CPU to reduce GPU memory usage.with tf.device('/cpu:0'):# TODO: Replace Lambda with custom Keras layer for loss.model_loss = Lambda(yolo_loss, # 传入 yolo_lossoutput_shape=(1, ), #期望输出的 shape , 因为目标函数输出为一个常量, 故为(1, )name='yolo_loss',arguments={'anchors': anchors, #传入参数, 这些参数是固定的, 生成 Lambda 对象时已经传入的'num_classes': len(class_names)})([ # 运行时传入的参数, 对应到 yolo_loss 中的 argsmodel_body.output, boxes_input,detectors_mask_input, matching_boxes_input])model = Model([model_body.input, boxes_input, detectors_mask_input,matching_boxes_input], model_loss)return model_body, model
训练 Model
def train(model, class_names, anchors, image_data, boxes, detectors_mask, matching_true_boxes, validation_split=0.1):"""这里便是将 create_model 中的 yolo_loss 作为目标函数的方法, 这种用法的确很奇怪, 容易让人误解。"""model.compile(optimizer='adam', loss={'yolo_loss': lambda y_true, y_pred: y_pred}) # This is a hack to use the custom loss function in the last layer.logging = TensorBoard()"""训练 CNN 是十分耗时的事情, 所以这里会在每迭代完一次之后就保存当前训练的 model。值得注意得是这里保存的模型为 traned____.h5 只是简单的加载了 create_model 中所谓的 pre-train-model即 yolo_topless 。训练完后也没有更新 yolo_topless。 所以下次再训练时也是重头开始的, 部分代码可以自己微调。"""checkpoint = ModelCheckpoint("trained_stage_3_best.h5", monitor='val_loss',save_weights_only=True, save_best_only=True)early_stopping = EarlyStopping(monitor='val_loss', min_delta=0, patience=15, verbose=1, mode='auto')model.fit([image_data, boxes, detectors_mask, matching_true_boxes],np.zeros(len(image_data)),validation_split=validation_split,batch_size=32,epochs=5,callbacks=[logging])model.save_weights('trained_stage_1.h5')model_body, model = create_model(anchors, class_names, load_pretrained=False, freeze_body=False)model.load_weights('trained_stage_1.h5')model.compile(optimizer='adam', loss={'yolo_loss': lambda y_true, y_pred: y_pred}) # This is a hack to use the custom loss function in the last layer.model.fit([image_data, boxes, detectors_mask, matching_true_boxes],np.zeros(len(image_data)),validation_split=0.1,batch_size=8,epochs=30,callbacks=[logging])model.save_weights('trained_stage_2.h5')model.fit([image_data, boxes, detectors_mask, matching_true_boxes],np.zeros(len(image_data)),validation_split=0.1,batch_size=8,epochs=30,callbacks=[logging, checkpoint, early_stopping])model.save_weights('trained_stage_3.h5')总结
这篇文章是不可能将所以代码都讲一遍的。 但是经过上面的讲解, 并在理解的前提下, 是完全可以研究并理解剩下代码并进行修改成自己认为更加好的版本, 例如将 TODO 完成和使用自己的数据, 并使代码变得更加简单理解。 我是很期待大家动手去实现, 希望这篇文章对正在学习 YOLO 算法各位有助。另外我不确定直接 clone 版本库是否仍然会缺少一些数据文件, 如果缺少请留言, 看到后我会以及给出。 还有在配置好后也是可以直接运行的, 但是请考虑好计算时间以及内存的使用, 至少要有8G内存, 也因此, 我调整了训练的大小。在后面给出写好的整个类, 但由于不想贴出一大段代码又无折叠功能,又没能放到github上,故给出一个下载链接。
最后还给出一些链接。
yolo-v1-tensorflow ,这个网络的实现是跟YOLO 论文中的一模一样的, 同样理解此文章后可以自行研究这个版本。
yolo-v1-tensorflow,跟上面的基本一样,基本就是翻译过一遍注释。
darknet,一切的根源。
测试代码以及合并的类使用 Jupyter-notebook 编写。 资源链接如下:
YOLO_learn