创新思想:
文章提出了一个新的多注意卷积神经网络框架,解决单一已知目标的实时RGB-D 6D姿态跟踪问题。这个框架将多个并行的软空间注意模块集成到多任务卷积神经网络结构中,结合了背景杂波和遮挡处理方法。
主要原理:
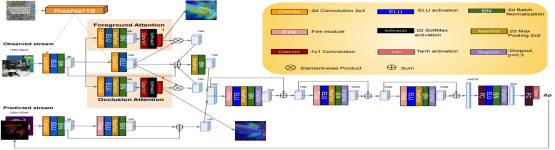
该卷积神经网络的框架。
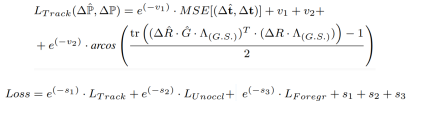
损失函数。
主要实验结果:

添加不同遮挡物对平移误差和旋转误差的影响。
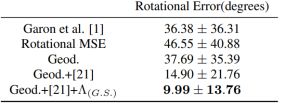
改进算法之后旋转误差的减小。
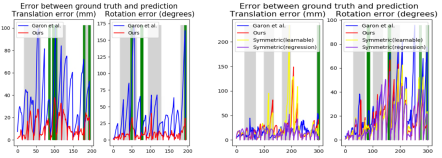
对于不同目标,该模型与其他模型的对比。其中左图为“龙”,右图为“饼干罐”。
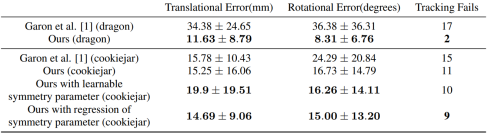
不同策略下的效果对比。
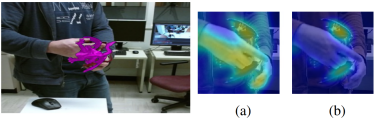
手上是一个“龙”的物体,右图是该模型预测“龙”的位置的结果。