首先在官网(https://www.intelrealsense.com/zh-hans/get-started-tracking-camera/)上认真阅读使用教程,让自己对 Realsense T265相机有一个初步的认识。了解过后,下面进行测试。(以下的测试操作步骤都是基于官网的教程,如果自己操作时遇到了问题,可以在官网上寻找解决办法)
一 在Windows上测试
安装官方提供的RealSense.Viewer软件,在软件中测试。首先,打开github网站https://github.com/IntelRealSense/librealsense/releases/tag/v2.36.0,然后找到网页的此处:

点击选中 Intel.RealSense.Viewer.exe下载,下载完成后安装即可。
最后,打开RealSense.Viewer软件开始测试。根据界面提示点击“Tracking Moduled”的开启按钮,界面会弹出如下的2D可视化界面:

Inter RealSenseT265追踪相机内置两个带鱼眼的灰度相机 一个IMU和一个VPU,所有V-SLAM算法都直接在VPU上运行。在2D可视化界面中,我们可以看到左右两个鱼眼灰度相机的广视角灰度图像,还有加速度流 角速度流 姿态流。
当点击界面右上角的“3D”按钮时,会打开如下的3D可视化界面:

移动T265相机,我们会发现界面上有一个T265模型也在移动,并且画出了轨迹线路,如上图所示。轨迹线路的颜色代表了轨迹的信任度大小,黄色代表轨迹信任度中等,绿色代表信任度较高。
此外,我们还可以点击“Record”按钮来记录T265相机的轨迹,轨迹信息会以.bag文件的形式保存到相应路径中。我们点击“Add Source”按键,可以把之前保存好的轨迹文件打开,把相机运动轨迹图形化显示到界面上,如下图所示:

**
二 在ubuntu上测试
**
1 安装realsense sdk库文件librealsense
1)二进制文件安装(源码不可见)(安装的具体流程详见官网https://github.com/IntelRealSense/librealsense/blob/development/doc/distribution_linux.md)
a 注册服务器的公钥:
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
b 添加服务器列表(Ubuntu 18.04用以下指令):
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic main" -u
c 安装所需的库:
sudo apt-get install librealsense2-dkms(深度相机专用内核扩展的DKMS软件包)
sudo apt-get install librealsense2-utils (RealSense?SDK提供的一部分demo和工具)
d 开发者开发调试用的包(可选):
sudo apt-get install librealsense2-dev(开发者所要用到的头文件和链接符号)
sudo apt-get install librealsense2-dbg(开发者debug用到)
e 在终端上运行以下命令来打开realsense-viewer可视化软件:
realsense-viewer
运行该命令后,会自动弹出如下的界面:

接下来要做的测试操作同Windows。
2)源码编译安装(源码可见)
在终端上输入以下命令来下载源码包:
git clone https://github.com/IntelRealSense/librealsense.git
该源码包是CMake工程,可以通过编译CMake工程的方式进行编译,即在源码包路径下打开终端,依次输入以下命令:
mkdir build
cd build
cmake ..
make
(若把该源码包放到ROS工作空间中的src目录下,需要通过catkin_make_isolated命令与ROS功能包分开编译)
在librealsense/build/examples里,有很多编译生成的可执行文件,运行这些文件完成测试。例如,我们在~/librealsense/build/examples/pose路径下打开终端,运行命令:
./rs-pose
终端上会不断打印出当前相机相对于初始位置的XYZ三轴坐标值,运行结果如下图所示:

2 安装realsense-ros功能包
安装好realsense 的SDK库文件后,在ROS工作空间的src路径下打开终端,输入命令:
git clone https://github.com/IntelRealSense/realsense-ros.git
以实现克隆realsense-ros功能包的源码。然后在工作空间目录下,打开终端输入以下命令
catkin_make
完成代码包的编译。
(注:编译时系统可能报错,说realsense-ros功能包的CMakeLists.txt中要求realsense SDK库文件的版本是2.37,而用户安装的是2.36版本。这里要说一下,截至目前,2.37版本为预发行版本,用户只能克隆2.36的版本。因此我们可以在realsense-ros功能包的CMakeLists.txt中,把版本改成2.36版本)
在realsense-ros包的launch文件夹下有许多测试用的lancuh文件,对于T265追踪相机,可以在终端上输入以下命令进行测试:
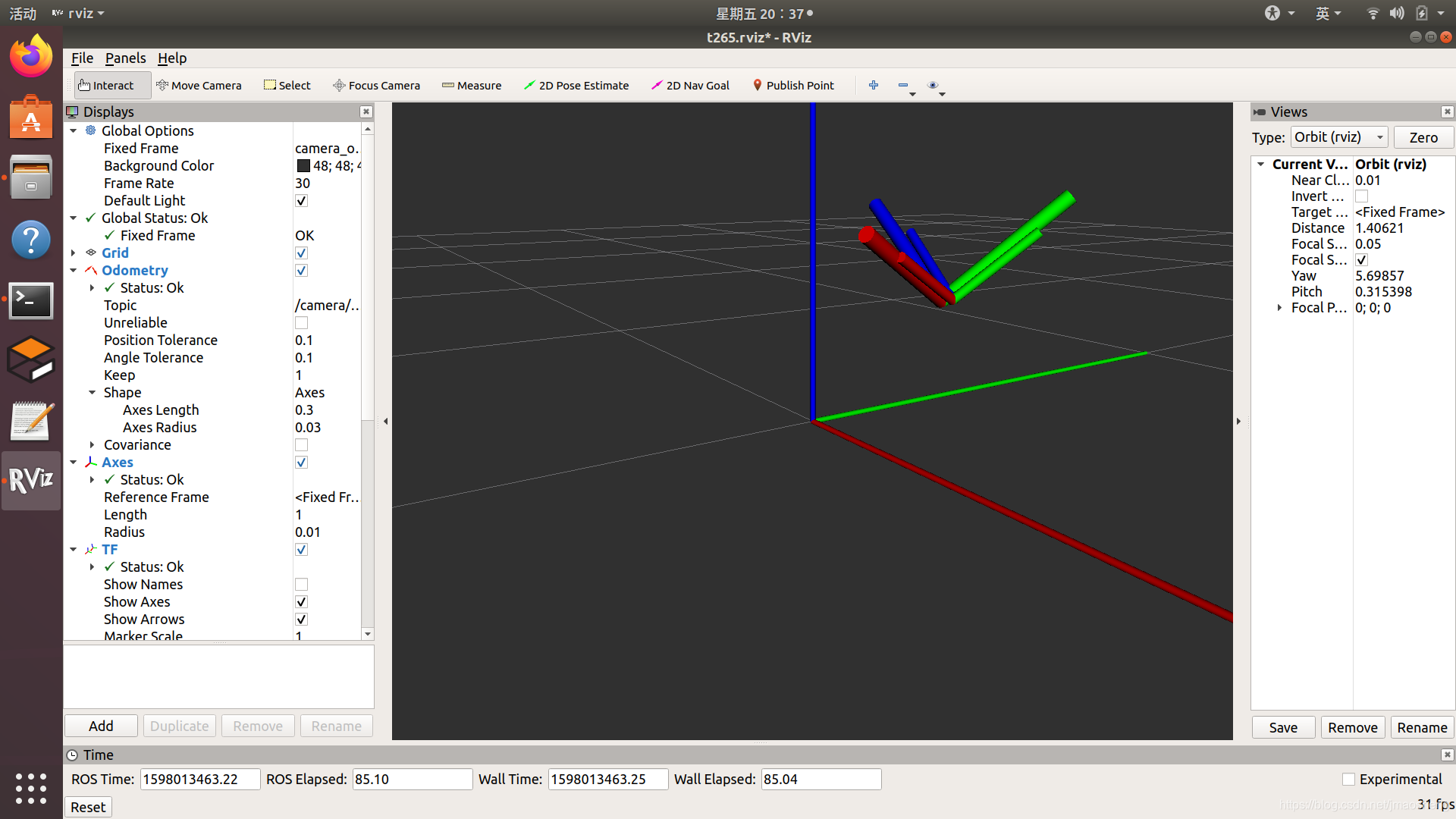
roslaunch realsense2_camera demo_t265.launch
运行该launch文件后,会自动启动加载了参数配置文件的Rviz,在Rviz的可视化界面中可以直观地看到相机的位姿变化:
此时,我们可以在终端上运行命令:
rostopic list
来查看当前的话题列表。话题列表如下图所示:

在rs_t265.launch文件中可以进行参数的配置,比如更改发布的话题。
如果想要查看话题信息,可以使用以下命令来实现:
rostopic list +话题名
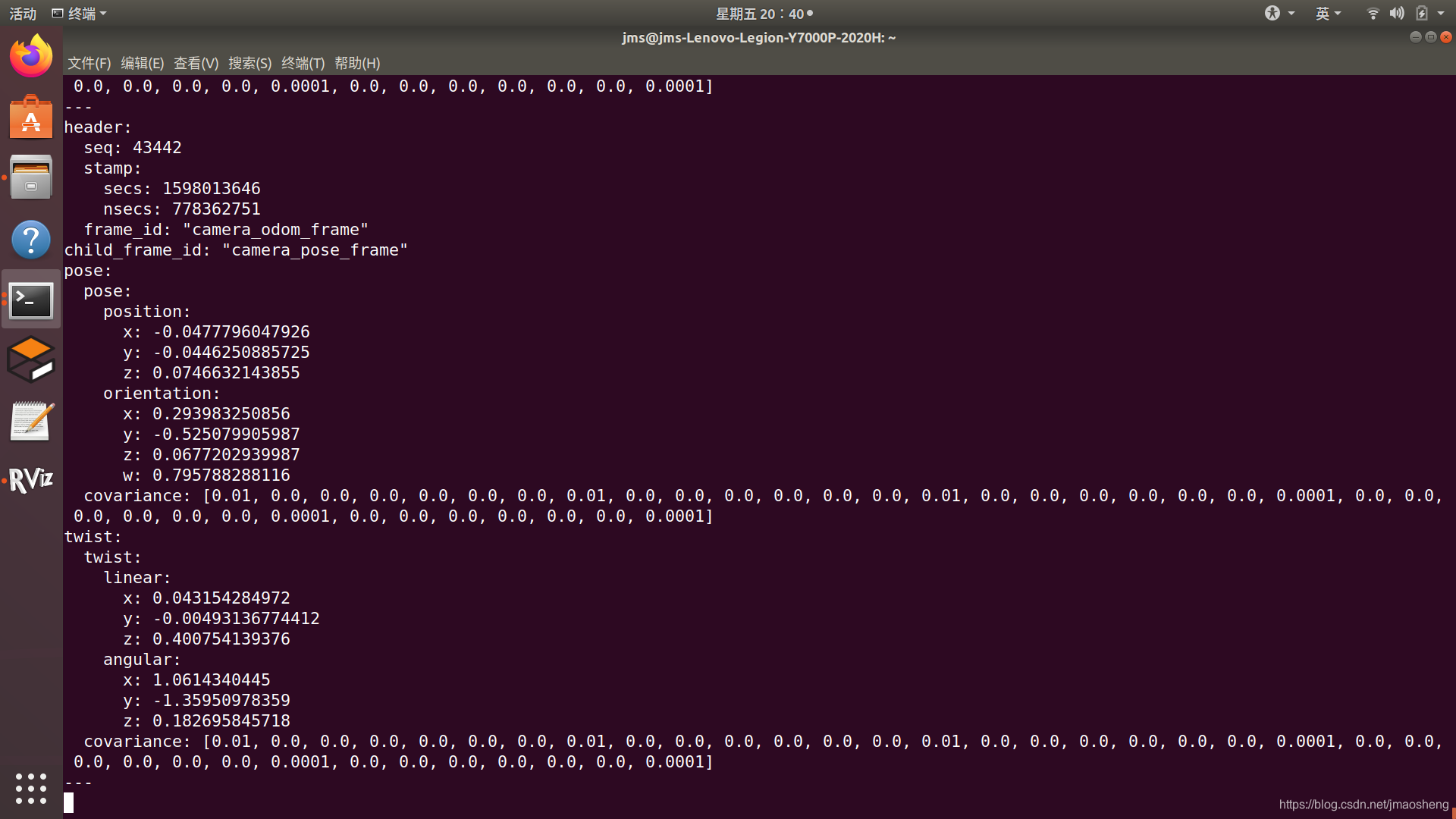
如果想查看具体的话题消息内容,可以使用rostopic echo命令。例如,要查看当前相机的坐标位置 姿态 线速度 角速度等信息,可以在终端上运行命令:
rostopic echo camera/odom/sample
运行后,如下图所示,终端会实时连续的打印相机的上述一系列信息: