本机演示实战
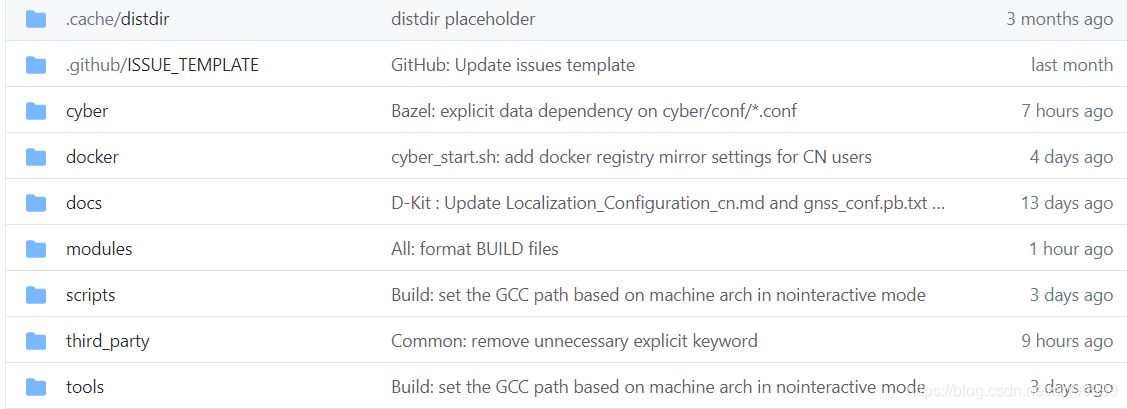
- 下图是Apollo项目的基本代码结构(Github:https://github.com/ApolloAuto/apollo)。包括Docker和Docs(主要放置一些文档)、Modules(核心模块算法都在该文件夹下)以及Scripts和Tools等。
Apollo软件的整个数据流转过程
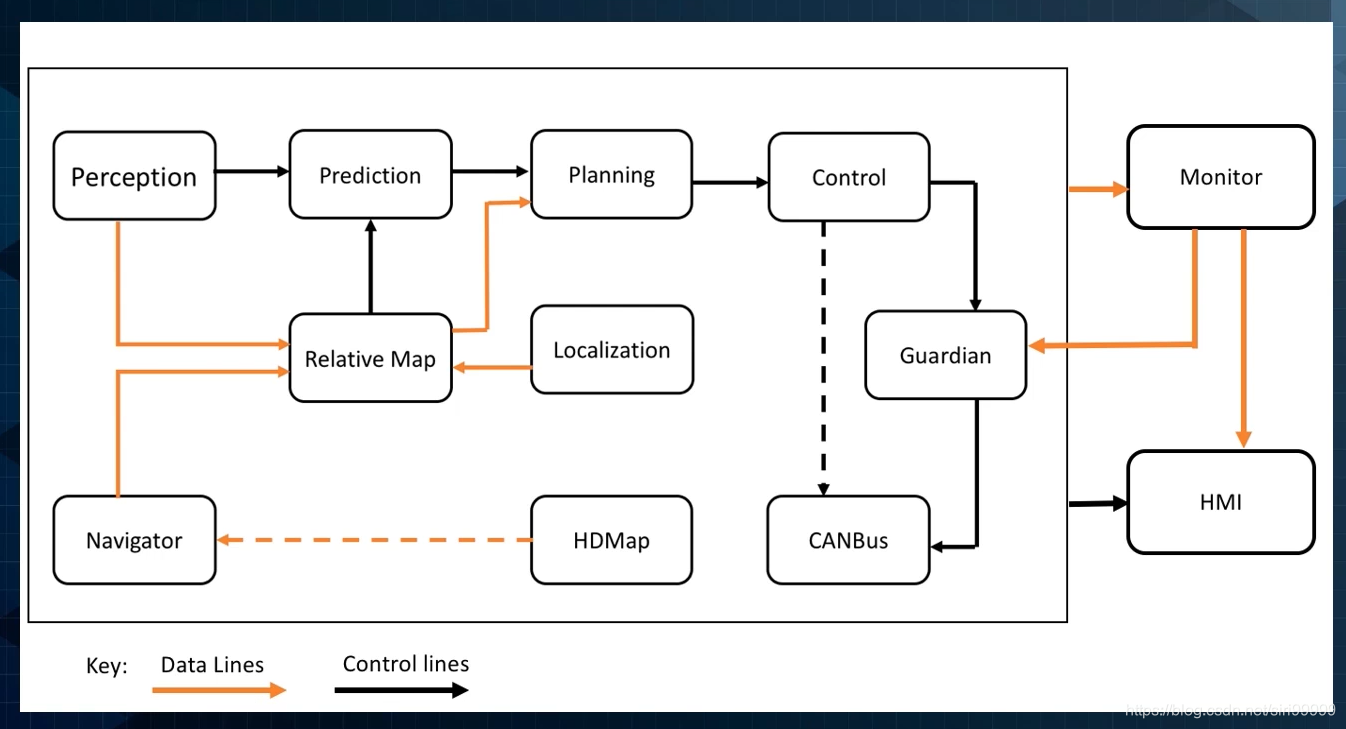
- 首先是通过高精地图和定位获得车辆周边的场景信息。
- 然后通过感知模块侦测道路上的障碍物,即一些动态信息,比如旁边的车、行人、自行车等等。
- 这些工作完成后将感知的信息传递给Prediction,预测感知障碍物的运行轨迹。
- 最后将预测结果包装再传给Planning模块。Planning根据障碍物和周边静态的情况,比如有哪些车道可选,去规划路线。路线规划完成后,将生成的轨迹传到Control模块。
- Control模块通过Can总线协议跟车辆交互,例如应该打多大角度的方向盘,车辆现在的加速度是多少,当前是应该踩刹车还是继续跟车等。同时也会从Can总线协议层面了解到车辆本身的信息。
Apollo实战过程

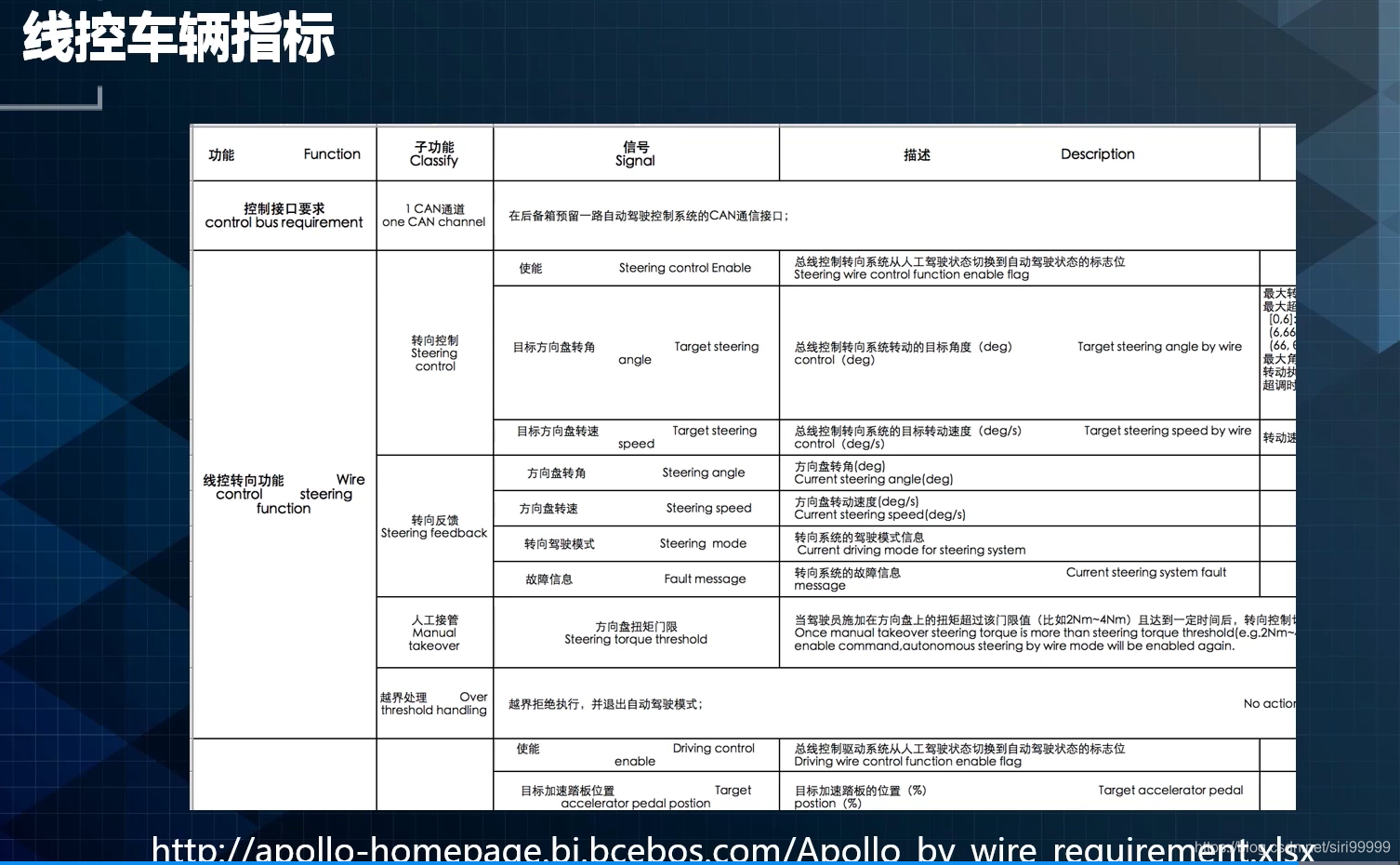
- 与apollo交互的车辆要有满足线控标准的车辆。