���Ѿ������� ML ��������ϵ�п���Ҫ������ȱ��©�����¼һЩϸ�ڵġ��Լ���֪���Ķ�����
�����ҵ��������ʦ GAN ϵ�е�4ƪ�ʼǣ�GAN ϵ�У�
- 1��Basic Idea
- 2��Conditional GAN
- 3��Unsupervised Conditional Generation
������������
- �������۵���GANԭʼ���µ�һЩ���ͣ����ܻ���֮ǰ��������Щ��ͻ����Ҳ������Ϊ���͵����⡣
- �������ǵ����ݶ��Ǹ�ά�ռ��еĵ㣬�� Generation ��֮ǰ���۹������ڸ��ʷֲ������ǿ���ʹ�ü�����Ȼ��������ϡ����֣���������ΪĿ��ֵΪ��ֲ���СKL ɢ�ȡ������ǣ���ϵķֲ�δ���Ǹ�˹�ֲ���
������˵������ϵķֲ��Dz�֪����ʽ����ɢ�ȵģ�����ô����ô�����أ� - �н� 2 ������� GAN ������֮�������ǿ����� Discriminator ���ӽ������ۡ�ɢ�ȡ����ָ�ꡣ��
How to define a general P_G?�� - ��
How to define a general P_G?���Ǽ����������������������ݷֲ�ɢ��Խ��D(x)Խ�÷ֱ���α������˵��ԭ������D(x)�ĸ���Ŀ���趨�dz����ģ����������ѧ����֤������max V(G,D)�����֣�ʵ�����������ʽ������� JSD (Jensen-Shannon divergence)�� - �������������ۣ�ʵ���Ͼ������� G �� D �ļ���С���ġ��� Algorithm ��
- ʵ������ô���� In practice �� ��
- Ŀ�꺯����ʵ��Ӧ������һЩ�Ķ� Objective Function for Generator in Real Implementation ��
- �����ֱ�ķ�ʽ�ܽ�һ��
Intuition�� - �������⣺
Can we consider discriminator as evaluation function?
����Ŀ¼
- ������������
- Сϸ��
- Generation
- How to define a general P_G?
- max V(G,D)
- Algorithm
- In practice ...
- Objective Function for Generator in Real Implementation
- Intuition
- Question?
Сϸ��
Generation

��ͼ�������Ǹ�ά�ռ��еĵ㡣����ϣ�������ҳ������ڸ�λ�ռ��еķֲ���

���ǿ���ʹ�ü�����Ȼ��������ϡ�

������Ȼ���ƣ�Ҳ��������Ϊ��С�� KL Divergence��KLɢ�ȣ� �����ϣ����ǽ���ʽ
��Ϊ
֮���Կ�����ô�任������Ϊ����������� һ���ϵ��û�С�
����ʽ����Ϊ
OK����ô���ڵ������ǣ� �Ǹ�˹�ֲ��Ļ������ںܶ�����ԡ� ���Ǹ�˹�ֲ��Ļ�����ô����Ȼ�����أ�
How to define a general P_G?

���ϣ���������Ҫ��һ�� Generator �����
��
��KLɢ����С��
�������ǣ����Dz�֪��
�Ĺ�ʽ�������ֱ�Ӽ��㡣

���ϵ�
��ʽ�������
- x �Ǵ� data �����ģ���ô����ϣ�� Խ��Խ�ã�
- x �Ǵ� �����ɳ����ģ���ô����ϣ�� ԽСԽ�á�
��ʵ���ϣ���ѵ��ʱ�Ϳ���ʹ����ʽ�ﵽ����Ŀ�꣺
���⣬��ʽ�� KL ɢ����ֱ�ӹ����ġ�

����ͼ�����ɢ���� D(x) ���������ֱ���ٵĹ�����
max V(G,D)

���ϣ� G �̶�����һ�� D ʹ V ���
ע����һ�����裺
�������κκ��������Բ����κ�ֵ��

�����������ô������ϣ������֡�

��������������ֵ����� V ��Ȼ��Ϊ�˽ӽ� KL ɢ�ȵ���ʽ������һЩ����������֡�

���֣�ʵ���Ϻ��������� Jensen-Shannon divergence ��
Algorithm

���ǣ����ǵ���Ŀ�������ͼ��ͼ���²��������������У����������ѡ��ij�� Discriminator �������� D ��Ŭ���ӽ��IJ��֡����� G ���ù�ϵ����
����Ϊ������G �Ŵﵽ�Լ���Ŀ�ꡣ������һ�ֲ�����
����ѵ�� G��D ����ѭ�����Ҹ�������Ϊһ�ֲ��ľ�����Ѱ�ҡ�

���ϣ����Ż� G ʱ�����
��ʵҲ�ǿ����ֵġ�����֮ǰѧ�� maxout �������

��ˣ����ϣ����ǿ��Խ��е������������綨����
���ǣ�Ӧע�⣬�ı� G ���ܻ��� D ����ֲ����š�

���ϣ����ע�⣬ÿ�β�Ӧ�ð� G ����̫�ࡣ
In practice ��
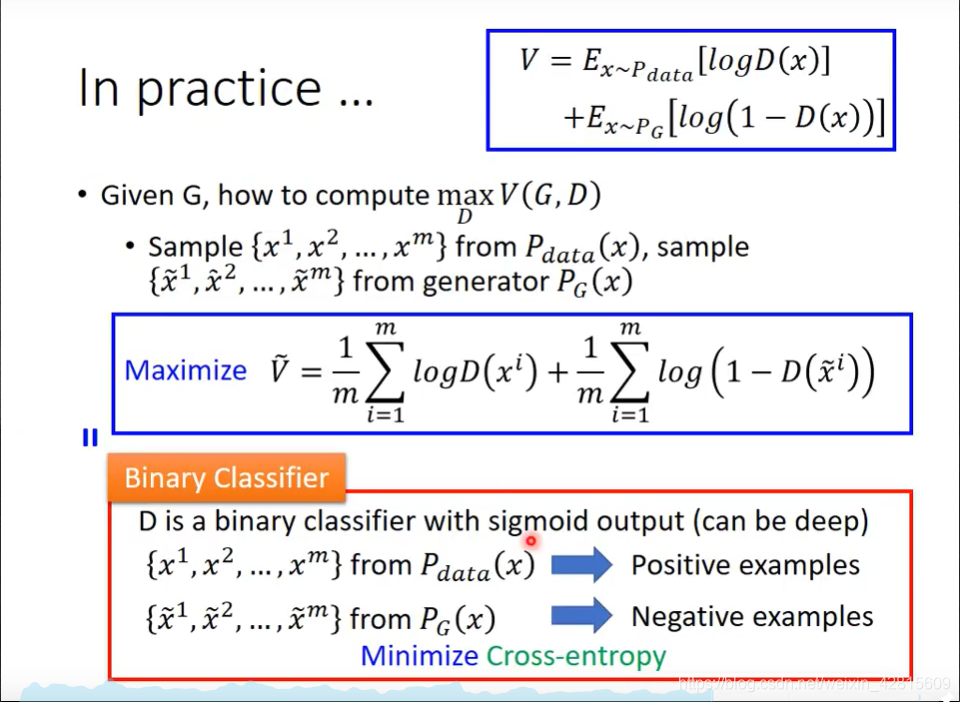
������ʵ���н��е��Ż��������ϡ�������ʵ���Ͼ���һ�����������⡣

��ˣ�����ܽ��������㷨���ϡ�ע�⣬�� G �ĸ����У�ͬ��ʹ�øø���ʽ������Ŀ���Ϊ��С����ʽ�ӵ�ǰһ���� G �أ���˲��ܡ����ң����ܸ��� G ̫�࣬���ֻ���� 1 ��ÿһ�������ң�ʵ������У�����������
Objective Function for Generator in Real Implementation

���ϣ������Խ�Ŀ����
��Ϊ
���ó�ʼ���½��ٶȱ�졣��ʵ���ϣ����߲��
Intuition

��������У����ɵ����ݷֲ��ӽ���ʵ���ݷֲ������� Discriminator ����������ʱ���ɵ����ݾͺܽӽ���ʵֵ�ˡ�
Question?

���ϣ����ڿε����ݣ��ο��� Ian Goodfellow����ͼ�� Yann Lecun �Ļõ�Ƭ������Щì�ܵġ�Yann Lecun ��Ϊ Discriminator Ӧ�÷�Ӧ���ݵķֲ��������õ���
����˭�ǶԵ��أ�Ŀǰ�����ۡ�
�������ǿ���ͨ��ʵ�����⣺ѵ����� GAN ���� Discriminator û���õ���Ҳ����ȫ��Ӧ���ݷֲ���