【论文阅读】3-Plan3D: Viewpoint and Trajectory Optimization for Aerial Multi-View Stereo Reconstruction
- 1、video
- 2、procedure
- 2.1、ROI
- 2.2、Initial set of images
- 2.3、Initial restruction (sfm\mvs)
- 2.4、Volumetric occupancy map(occupied/ free-space/unobserved voxels)
- 2.5、Graph(node-viewpoint edge-path motion)
- 2.5.1、Viewpoint
- 2.5.2、path
- 2.5.3、Edge wight
- 2.6、Assess
- 2.7、Limiting:
1、video
youtube
2、procedure
2.1、ROI
2.2、Initial set of images
2.3、Initial restruction (sfm\mvs)
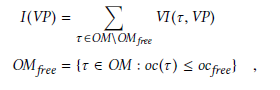
2.4、Volumetric occupancy map(occupied/ free-space/unobserved voxels)
Value --: 0(empty) /0.5(unknowed)/ 1(knowed occupied)
Viewpoint-pixel-ray-caste-3D point(parallel projection)
2.5、Graph(node-viewpoint edge-path motion)
2.5.1、Viewpoint
- Initial sample: candidate node(dense in ROI, sparse out ROI)
- Camera pose―idealize―far away ,fronto-parallel,roll-0, pitch(-pi/2,0)
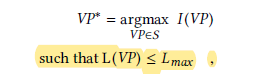
- Maximize total information:(重点)
1)目标函数:(计算公式逐步细化)

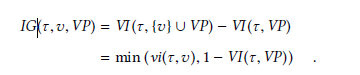
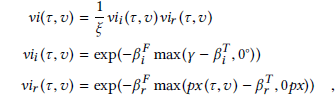
incorporate stereo matching: (the edge selection strategy also includes) ----This encourages on average 1/ξ cameras to observe the same point:
Incidence: angle(incident viewing-surface normal)
Resolution: the number of pixels


2)优化方法:
Greedy (next viewpoint-far)/cost-benefit(next viewpoint-close)―折中
Recursive
split the budget into fisrt-middle & middle-end
- Travel budget
- Free-space\Collision freedom (according to the occupancy map)
- Additional viewpoint: sparse matching
2.5.2、path
Bounding box(drone\obstacle)
RRT(rapidly exporing random trees)
Between the sparse matching
2.5.3、Edge wight
Real distance
2.6、Assess
Precision Recall F1 & F
Ground truth \ Roberts
Regular baseline pattern(circles,meanders,hemispheres)
2.7、Limiting:
- Possible viewpoints-finite (distance away obstacle)
- Split two scanning phases(change quickly environment- not suitable)
- Obstacle: ignore power line(initial restructure)