Temporal Structure Mining for Weakly Supervised Action Detection
- 作者贡献
- 与SMS比较
- 方法
- 定义
- 时间结构挖掘
- 阶段过滤器学习
- 最大路径发现
- 实验
- 数据集和评估方法
- 主干网络和双流融合
- 实现细节
- 消融实验和比较结果
作者贡献
提出了时间结构挖掘(TSM)方法
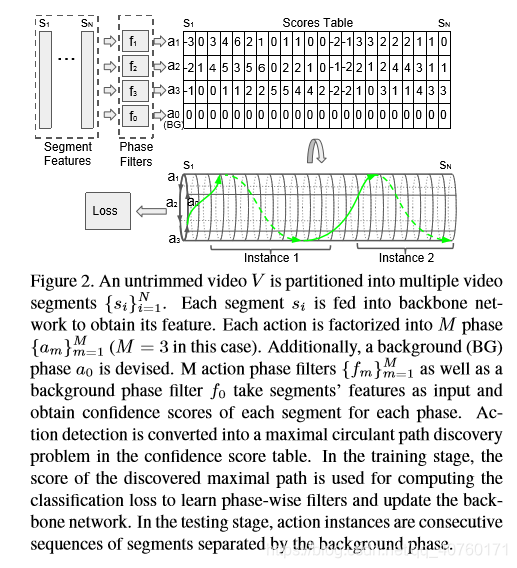
图2显示了提出的时间结构挖掘(TSM)方法的体系结构。如图所示,一个未修剪的视频被分割成多个段,这些段的特征来自于主干网络。阶段滤波器以分段级特征作为输入,生成阶段级置信分表。将动作检测转化为在分数表中寻找最大循环路径,利用最大循环路径的分数计算分类损失。梯度是根据更新TSM的损失推导出来的。
与SMS比较
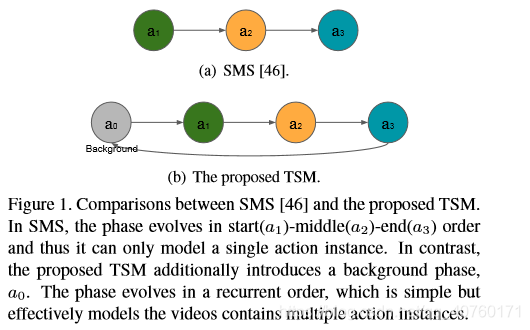
- TSM引入了一个额外的背景阶段来对背景建模,它在一个未修剪的视频中分离多个动作实例。简单但有效地解决了包含多个动作实例的视频中的动作检测问题。
- 在SMS中,阶段按照开始(a0)-中间(a1)-结束(a2)顺序发展。因此,它只能对单个操作实例建模。相比之下,TSM则是按照一个循环的顺序发展,并有效地对包含多个动作实例的视频进行建模。
方法
定义
- 对于给定的视频 ,分解成 个短片段 。
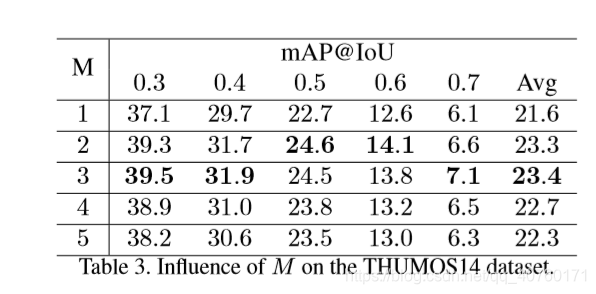
- 一个类别有 个行为阶段{ } ,同时背景表示为 。
- 片段 从主干网络中获得特征, 包含主干网络的参数
-
是
中
类的第
阶段
的置信度分数:

使用 构建置信度分数表(如下图所示):
- 定义 : 是片段索引, 是阶段索引, 。
- 定义 :作为置信度分数表的路径。
- 定义 :为类别c的路径。
时间结构挖掘
- 路径约束:
给定在阶段 中的片段 ,下一个片段 的阶段 只有两个选择:1)与 保持相同的阶段,2)演化到下一个阶段:

这种周期性的演化机制有效地处理包含多个动作实例的视频。 - 计算路径分数
:

是一个用于忽略背景阶段的指示器。由于背景分数不用于计算路径分数,所以设置 ,即:
- 通过路径约束,挖掘最大路径分数:

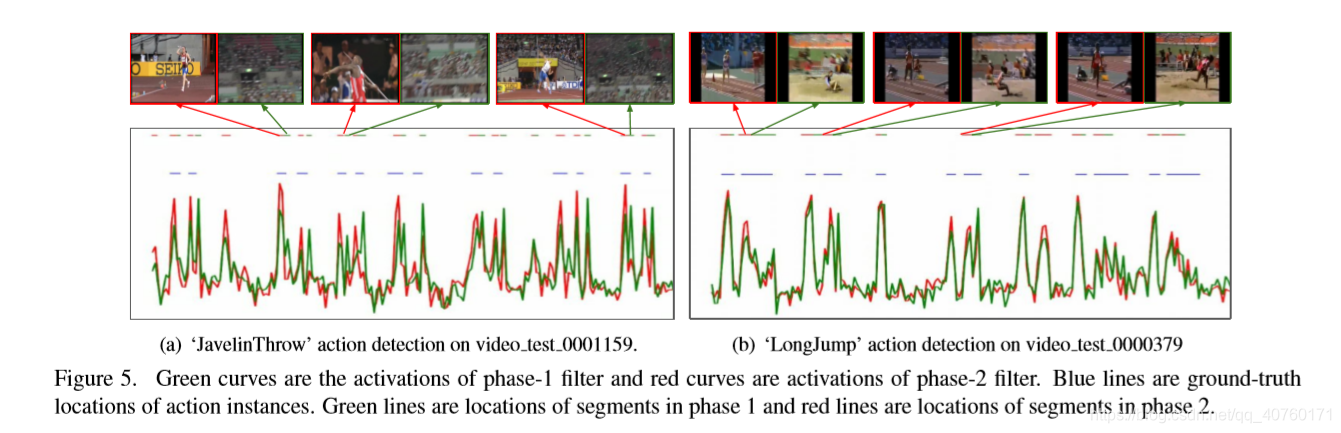
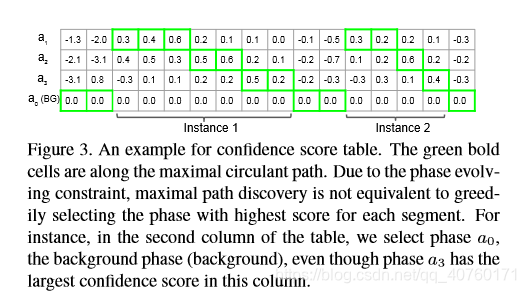
图3中用绿方框显示了一个最大循环路径的例子。
在训练阶段,最大循环路径 的分数代表了行为c在视频中的存在,它构造了分类损失。
在测试阶段,通过背景阶段分离的连续段进行分组来检测某个类的动作实例。如图3所示,它检测两个由背景分隔的行为实例。
阶段过滤器学习
问题:阶段滤波器的学习依赖于发现的最大路径,同时最大路径的发现依赖于预先训练的阶段滤波器。它们之间的相互依赖导致训练过程不能按顺序进行。
解决:采用一个交替更新的策略,分为两步。
1)基于当前滤波器{
}
的输出,使用最大化路径发现得到
2)使用
和视频的真实标签
{0, 1}计算分类损失函数:

注:这里使用的是
,而不是
,因为对于背景类
,所以
,所以
,所以
,是的损失函数不够灵活,故使用
。
迭代:
尽管该算法支持骨干网权值的更新,但由于计算资源的限制,在实现中对骨干网进行了修正,并将其作为特征提取模块。
流程:

- 每各类的每个阶段都有一个权重和偏置,对其进行初始化。
- 在每次迭代中,对每个视频提取特征,特征大小C×M×T。(类别,阶段,帧)
- 对每个视频特征对于每个类都有一个置信度分数表,基于算法2,找到视频对于每个类的 ,并计算损失函数。
- 更新权重和偏置。
注:对于同一实例片段,应该是对应分数最大的那个类别。
最大路径发现
一种动态规划算法,节约发现路径时间,复杂度降为
- 重写约束:

- 定义
:表示在类别c中:所有从片段
开始,在片段
(在阶段
)的所有路径的最大分数。
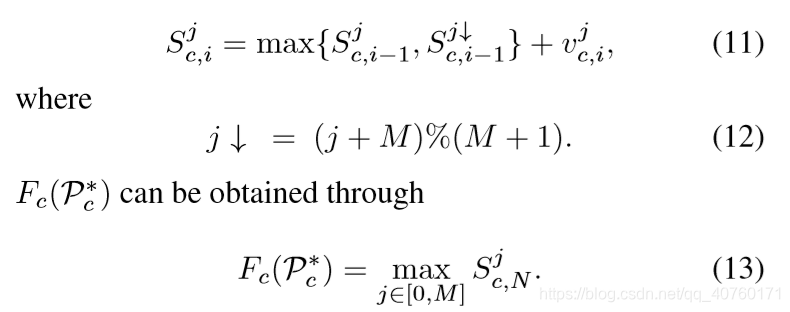
以图3为例,求得 列表如下:根据约束求得 如标红数字。

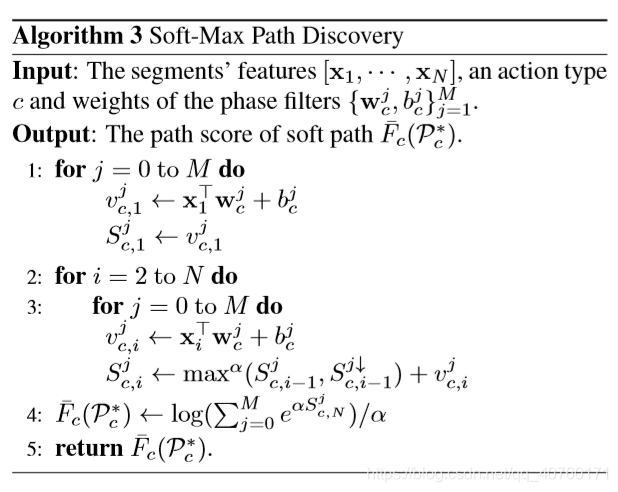
具体算法流程如下:

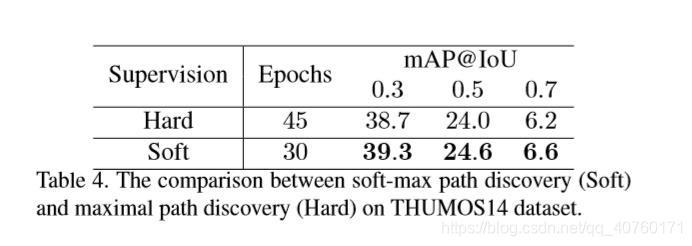
- 前面提到的最大路径发现过程只选择得分最高的路径。在这种情况下,梯度只在沿着最大路径的单元中反向传播,而忽略不是最大路径中的单元。为在分数表中挖掘更多信息,稳定训练。提出一种软最大路径发现算法:
其中:

在这里
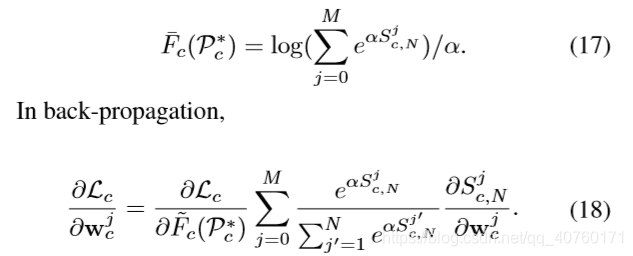
注:软最大路径发现仅在训练中执行。在测试中,仍然执行最大路径发现来检测动作实例。
具体算法流程如下:
实验
数据集和评估方法
数据集:THUMOS14 , ActivityNet 1.2和ActivityNet 1.3
评估标准:mAP
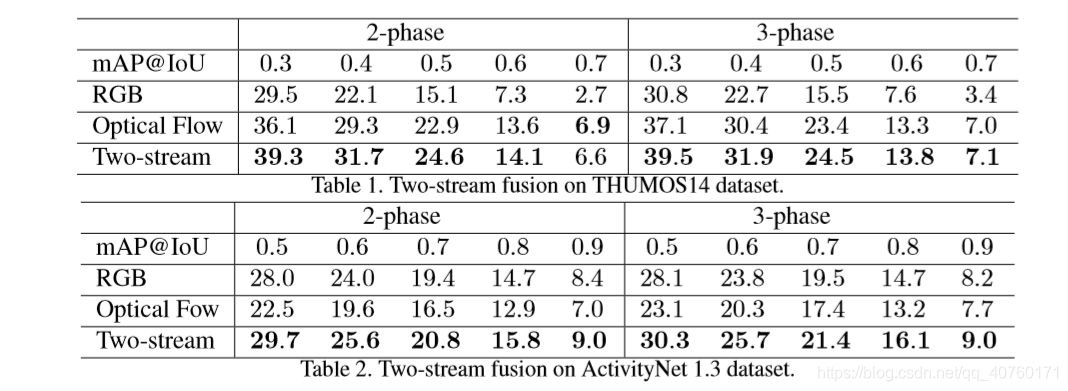
主干网络和双流融合
采用两种主干网络来提取视频片段的特征。
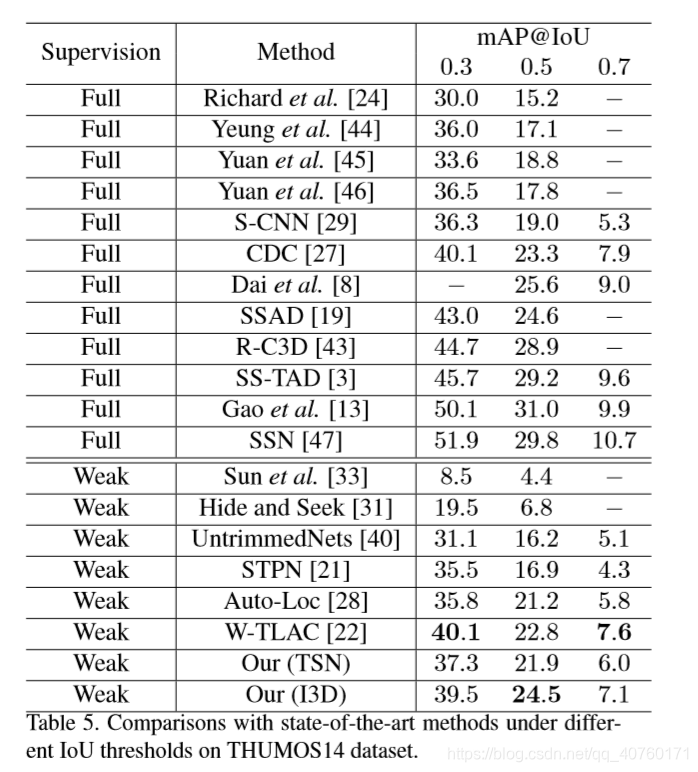
- 在 Kinetics数据集上预训练的I3D[5],一个比较基线STPN也采用了该数据集。
2.由UntrimmedNet预训练的TSN,它也被一个比较基线Auto-Loc使用。 - 虽然算法支持端到端训练,但是由于计算资源有限,只使用主干作为特征提取模块。
利用两个独立的网络,分别以RGB和光流作为输入。将两流网络的检测结果进一步融合,得到最终的检测结果。具体来说,给定一个视频V和一个特定的类c,首先分别基于单个RGB或光流网络获得候选的时间间隔
{
}
和
= {
}
。每个区间
的最终分数是由RGB网络和光流网络的分数结合得到的:

在THUMOS14数据集中,λ= 2组。在ActivityNet 1.2和1.3 ActivityNet数据集中,λ= 0.5。由于
中存在重叠区间,根据其得分对区间进行非最大抑制。
实现细节
- 对于RGB流,将帧的最小维度缩放到256,并执行大小为224的中心裁剪。
- 对于光流场,采用了TV-L1光流算法。将得到的光流像素值截断到[20,20]范围,然后在-1和1之间重新标度。
- 从每个视频中以均匀的间隔采样400个片段。网络使用传统的SGD优化器进行训练。学习率初始化为0.005,每10个周期衰减为1个10。整个训练过程在30个epoch处停止,相对于初始化权值,性能相当稳定。
- 在测试时,对于每个类,根据它们的结构分数对检测到的候选位置进行排序。
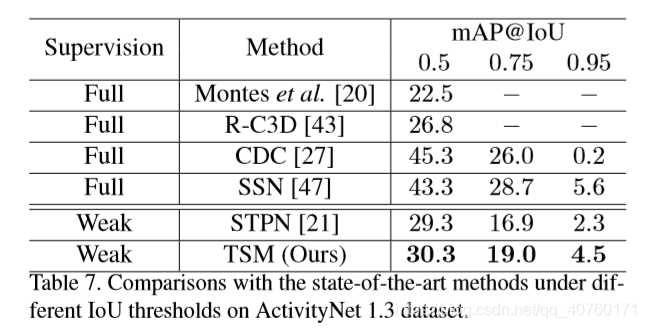
消融实验和比较结果