ШЛЖјЃЌетжжНтОіЗНЗЈжЛФмНтОіетИіЬиЖЈЕФЮЪЬтЃЌЖјЧвНтОіжЎКѓЮвУЧвВЮоЗЈбЇЕНвЛаЉЪЕМЪЕФЖЋЮїЁЃвЊЯыГЙЕзУїАзЃЌашвЊДгдДЭЗШыЪжЃЌвВОЭЪЧЫЕЃЌ ВЛвЊЮЪЁАMoveIt! дѕУДАбЛњаЕЪжДгПеМфвЛИіЕувЦЕНСэвЛИіЕуЃПЁА ЃЌ ЖјЪЧвЊЮЪЁБMoveIt! ЮЊЪВУДФмАбЛњаЕЪжДгПеМфвЛИіЕувЦЕНСэвЛИіЕуЃПЁА ЁЃ етвЛЕуУїАзжЎКѓЃЌгіЕНРрЫЦЕФЮЪЬтЃЌВХФмДгШнгІЖдЁЃЭЌРэЃЌетВЛНіЪЪгУгкMoveItЃЌвВЭЌбљЪЪгУгкЦфЫћШЮКЮROSЙІФмЁЃ
ЫљвдЃЌЯТЮФжаЮвУЧЛсМћЕНвЛаЉОпЬхЕФР§згЃЌЕЋећЬхЩЯЃЌИќЧуЯђгкКъЙлЕФИХФюКЭвЛаЉЛљДЁЕФЗНЗЈЃЌЯЃЭћЖдДѓМвФмгаЫљАяжњЁЃетРяЕФАяжњжИЕФЪЧдіЧПЖддЫЖЏЙцЛЎКЭMoveit, OMPLЕФећЬхРэНтЃЌЖјЗЧОжЯогкЭъГЩФГвЛИіЙІФмЃЌБрвыдЫааФГвЛИіЮФМўЁЃ
ЮвГЂЪдгУзюМђЕЅЃЌзюЭЈЫзЕФБэДяЗНЪНРДНтЪЭетаЉЮЪЬтЃЌЦфжаВЛУтЛсгавЛаЉбЇЪѕЩЯЕФДэЮѓгУДЪКЭНтЪЭЃЌЧызЈвЕЕФХѓгбУЧМћСТЃЌвВЛЖгжИГіДэЮѓЁЃ
вЛ. ЛљДЁИХФю
ЪзЯШЃЌЮвУЧвЊСЫНтвЛаЉЛљДЁЕФИХФюЃЌСЫНтИїИіУћДЪЕФвтвхКЭЧјБ№ЁЃ
1.1. дЫЖЏЙцЛЎ (Motion Planning)
ЮвУЧетРяНВЕФ дЫЖЏЙцЛЎ ЃЌгаБ№гк ЙьМЃЙцЛЎ (Path Planning)ЁЃвЛАуРДЫЕЃЌpath planningгУгкЮоШЫГЕ/ЮоШЫЛњСьгђЃЌЖјmotion planningжївЊгУгкЛњаЕБлЃЌРрШЫЛњЦїШЫСьгђЁЃЕБШЛСЫЃЌетСНепУЛгаБОжЪЕФЧјБ№ЃЌРэТлЩЯЫЕMoveIt!КЭOMPLЭЌбљПЩвдгУгкЮоШЫГЕЮоШЫЛњЕФЙцЛЎЃЌЕЋВЛУтгааЉЩБМІгУХЃЕЖЕФИаОѕЁЃСНепЙцЛЎЕФПеМфЮЌЖШВЛЭЌЃЌЕМжТЫћУЧЕФФбвзГЬЖШВЛЭЌЁЃОйР§ЫЕУїЃЌШчЙћВЛПМТЧЫйЖШМгЫйЖШЃЌжЛПМТЧЮЛжУЕФЛАЃЌЮоШЫГЕЙьМЃЙцЛЎЮЌЖШЪЧ3 (x,y,КЭНЧЖШ), ЮоШЫЛњЪЧ6 (x,y,z,КЭСэЭт3ИіСПШЗЖЈПеМфЕФа§зЊНЧЖШ)ЁЃШЗЖЈ3DПеМфЕФвЛИізЫЪЦ(pose)ашвЊ6ИіБфСПЃЌЖјЖдгкЙиНкЪ§Дѓгк6ЕФЛњаЕБлНсЙЙЃЌЫќЕФЙцЛЎПеМфЮЌЖШОЭДѓгк6ЃЌГЩЮЊШпгрЯЕЭГ(redundant system)ЃЌДгЖјЪЙЙцЛЎЮЪЬтБфЕУИќЮЊИДдгЁЃЫљЮНШпгрЯЕЭГЃЌОЭЪЧЫЕЃЌДцдкЖржжЙиНкНЧЖШХфжУФмЙЛЪЙЕУжеЖЫДяЕНЯрЭЌЕФЮЛзЫЃЌДцдкЮоЪ§ЕФНтЁЃетЪЧДяЕНЕФзюжезЫЪЦгаЮоЪ§ИіНтЃЌФЧУДШчКЮЕНДяетИізюжезЫЪЦЃЌећИідЫЖЏЕФЙьМЃЃЌИќЪЧДцдкЮоЪ§ИіНтЁЃ
МШШЛДцдкЮоЪ§ЕФНтЃЌФЧУДЮЪЬтРДСЫЁЃКмУїЯдЃЌДцдкСНжжВЛЭЌЕФЗНЯђЃЌвЛжжЪЧевЕНзюКУЕФФЧИіНтЃЌСэвЛжжЪЧПьЫйЕФевЕНвЛИігааЇЕФНтЁЃЧАепЃЌДѓВПЗжЫуЗЈЪЙгУзюгХЙцЛЎ (Optimization-based Planning)ЃЌКѓепЪЙгУВЩбљЙцЛЎ (Sampling-based Planning)ЁЃОпЬхЕФЧјБ№КЭЫуЗЈЃЌВЛдкетРязИЪіЁЃ
1.2. ПЊдДдЫЖЏЙцЛЎПт (OMPL).
НгЩЯЮФЃЌЖјOMPL (Open Motion Planning Library)ЃЌ ПЊдДдЫЖЏЙцЛЎПтЃЌОЭЪЧвЛИідЫЖЏЙцЛЎЕФC++ПтЃЌЦфАќКЌСЫКмЖрдЫЖЏЙцЛЎСьгђЕФЧАбиЫуЗЈЁЃЫфШЛOMPLРяУцЬсЕНСЫзюгХЙцЛЎЃЌЕЋ змЬхРДЫЕOMPLЛЙЪЧвЛИіВЩбљЙцЛЎЫуЗЈПт ЁЃЖјВЩбљЙцЛЎЫуЗЈжаЃЌзюГіУћЕФФЊЙ§гк Rapidly-exploring Random Trees ( RRT ) КЭ Probabilistic Roadmap ( PRM )СЫ, ЕБШЛЃЌетСНИіЪЧБШНЯРЯЕФЃЌЛЙгаКмЖр ЦфЫћ аТЫуЗЈЁЃ
- OMPLФмзіЪВУДЃП МђЕЅЫЕЃЌОЭЪЧЬсЙЉвЛИідЫЖЏЙьМЃЁЃИјЖЈвЛИіЛњЦїШЫНсЙЙ(МйЩшгаNИіЙиНк)ЃЌИјЖЈвЛИіФПБъ(БШШчжеЖЫвЦЕНxyz)ЃЌИјЖЈвЛИіЛЗОГЃЌФЧУДOMPLЛсЬсЙЉИјФувЛИіЙьМЃЃЌАќКЌMИіЪ§зщЃЌУПвЛИіЪ§зщГЄЖШЪЧNЃЌвВОЭЪЧвЛИіЭъећЕФЙиНкЮЛжУЁЃбизХетИіЙьМЃвРДЮвЦЖЏЙиНкЃЌОЭПЩвдзюжеАбжеЖЫвЦЕНxyzЃЌЕБШЛЃЌетИіЙьМЃгІЕБВЛгыЛЗОГжаЕФШЮКЮеЯАЗЂЩњХізВЁЃ
- ЮЊЪВУДгУOMPLЃП дЫЖЏЙцЛЎЕФШэМўПтКЭЫуЗЈгаКмЖрЃЌЖјOMPLгЩгкЦфФЃПщЛЏЕФЩшМЦКЭЮШЖЈЕФИќаТЃЌГЩЮЊзюСїааЕФЙцЛЎШэМўПтжЎвЛЁЃКмЖраТЫуЗЈЖМдкOMPLПЊЗЂЁЃКмЖрЦфЫћШэМўЃЈАќРЈROS/MoveItЃЉЖМЪЙгУOMPLзідЫЖЏЙцЛЎЁЃ
1.3. ФцдЫЖЏбЇ (Inverse Kinematics)
- ЪВУДЪЧФцдЫЖЏбЇ(IK)ЃПМђЕЅЫЕЃЌОЭЪЧАбжеЖЫЮЛзЫБфГЩЙиНкНЧЖШЃЌq=IK(p)ЁЃpЪЧжеЖЫЮЛзЫ(xyz)ЃЌqЪЧЙиНкНЧЖШЁЃ
- ЮЊЪВУДвЊгУIKЃПOMPLЪЧВЩбљЫуЗЈЃЌвВОЭЪЧвЊдкЙиНкПеМфВЩбљЁЃ етгыЮоШЫГЕЕФЙцЛЎгавЛИізюУїЯдЕФЧјБ№ЃЌЮоШЫГЕЕФФПБъОЭЪЧдкВЩбљПеМфЃЌ e.g. ФПБъЪЧ(x,y), ВЩбљПеМфвВЪЧ(x,y). ЕЋЪЧЖдгкЛњаЕБлЃЌФПБъЪЧжеЖЫПеМфЮЛжУ(xyz), ЕЋВЩбљПеМфШДЪЧЙиНкПеМф(q0,q1,ЁqN)ЁЃгаСЫIKжЎКѓЃЌЮвУЧОЭПЩвдАбШ§ЮЌПеМфЕФФПБъpзЊЛЏЮЊЙиНкПеМфЕФФПБъqЁЃФЧУДетбљОЭЛсШУВЩбљЫуЗЈФмЫуЕФИќПьЃЌОпЬхЗНЗЈВЛзИЪіЃЌетбљЕФЫуЗЈгаRRT-ConnectЃЌBKPIECEЕШЕШЫЋЯђВЩбљЫуЗЈЁЃ
1.4. MoveIt!
ЮЪЃКЮвВЛЯыПДвВПДВЛЖЎOMPLКЭИїжжЫуЗЈЃЌЕЋЪЧЮвЯыШУЛњаЕБлЖЏЦ№РДЃЌдѕУДАьЃП
Д№ЃКФЧете§ЪЧMoveIt!ЕФЩшМЦГѕждЁЃMove ItЃЁШУЫќЖЏЦ№РДЃЁ
OMPLЪЧдЫЖЏЙцЛЎЕФЁАЙцЛЎЁБВПЗжЃЌЖјMoveIt!ЪЧOMPLЕФROSНгПкЁЃЕБШЛетВЛЭъШЋзМШЗЃЌOMPLгаЕЅЖРЕФROSНгПкЃЌЕЋвРОЩКмЗБдгЃЌЖјMoveItЪЧOMPL ROSНгПкЕФНгПкЁЃЁЃЁЃЖјЧвMoveIt!ЛЙНсКЯСЫЦфЫћвЛаЉЙІФмЃЌзмжЎMoveIt!ОЭЪЧИіДѓНгПкЁЃЁЃ
- MoveIt!ФмзіЪВУДЃПвЛОфЛАЃЌMoveIt!ОЭЪЧвЛИіФЃПщЛЏЕФНгПкЃЌШУФудкзюЖЬЪБМфФкЃЌВЛгУздМКаДЬЋЖрДњТыЃЌОЭФмХфжУГівЛИіROS PackageРДЮЊФуЕФЛњаЕБлзідЫЖЏЙцЛЎЁЃ
2.1 зМБИURDF package
ЪзЯШЮвУЧвЊзМБИвЛИіЛњаЕБлЕФurdfЃЌШчЙћФувбгаURDFЃЌПЩвдЪЙгУздМКЕФurdfФЃаЭЁЃШєЪжЭЗУЛгаЯжГЩЕФURDFЃЌПЩвдДг ДЫДІ ЯТдивЛИіПтПЈLWRМђЛЏФЃаЭURDFЃЌетЪЧвЛИіЙЬЖЈЕззљ7здгЩЖШЕФЛњаЕБлЁЃ
ДгИУСЌНгДІвРДЮНјШыexamples/sovlers/ik_solver_demo/resourcesЃЌЯТдиРяУцЕФlwr_simplified.urdfЁЃ
ИДжЦДњТы
|
1
2
3
4
|
cd path_to_catkin_ws/src
catkin_create_pkg lwr_description
cd lwr_description
mkdir urdf
|
НЋЯТдиКУЕФlwr_simplified.urdfЗХШыurdfЮФМўМажаЃЌетбљвЛИіurdf packageБуДДНЈКУСЫЁЃ
2.2 MoveIt!ХфжУжњЪж (MoveIt! Setup Assistant)
2.2.1 ДђПЊMoveIt! Setup Assistant
ИДжЦДњТы
|
1
|
roslaunch moveit_setup_assistant setup_assistant.launch
|

MoveIt! Setup Assistant ЪЧвЛИіЭМаЮНчУцЃЌПЩвдШУЮвУЧВЛгУаДДњТыПДДњТыЃЌжБНггУЪѓБъЕуЛїОЭПЩвдХфжУЛњЦїШЫЕФдЫЖЏЙцЛЎЫљашвЊЕФаХЯЂЁЃЕуЛїCreate New MoveIt Configuration PackageРДДДНЈаТЕФХфжУАќЃЌбЁдёИеИеЯТдиЕФurdfЃЌШЛКѓЕуЛїLoad Files диШыЮФМўЁЃ
2.2.2 ДДНЈХізВУтМьОиеѓ(ACM)
ЕуЛїSetup AssisantЕФзѓБпЕкЖўЯюЁЏSelf-CollisionsЁЏЃЌдкетРяЮвУЧНЋДДНЈХізВУтМьОиеѓ(Avoid Collision Matrix, ACM)ЁЃдйДЮЧПЕїЃЌдѕУДДДНЈКмМђЕЅЃЌЕуЛївЛЯТЁЏRegenerate Default Collision MatrixЁЏОЭПЩвдСЫЃЌЮЪЬтЪЧЃЌЮЊЪВУДЃПACMЪЧзіЪВУДЕФЃП
ЮвУЧжЊЕРЃЌХізВМьВтЪЧЗЧГЃИДдгЕФдЫЫуЙ§ГЬЁЃЖдгкЖрЙиНкЛњаЕБлЛђепРрШЫЛњЦїШЫРДЫЕЃЌЛњаЕНсЙЙИДдгЃЌжЋЬхЖрЃЌХізВМьВташвЊЩцМАКмЖрЕФПеМфМИКЮМЦЫуЁЃЕЋЪЧЖдгкИеЬхЛњЦїШЫРДЫЕЃЌгааЉжЋЬхжЎМфЪЧВЛПЩФмЗЂЩњХізВЕФЃЌБШШчдБООЭЯрСкЕФжЋЬхЃЌБШШчРрШЫЛњЦїШЫЕФНХКЭЭЗЁЃетРяЩњГЩЕФACMОЭЪЧИцЫпЮвУЧЃЌетИіURDFЫљУшЪіЕФЛњЦїШЫЃЌФФаЉжЋЬхжЎМфЪЧВЛЛсЗЂЩњХізВЕФЁЃФЧУДдкжЎКѓЕФХізВМьВтЫуЗЈжаЃЌЮвУЧОЭПЩвдТдЙ§ЖдетаЉжЋЬхжЎМфЕФМьВтЃЌвдЬсИпМьВтаЇТЪЁЃ
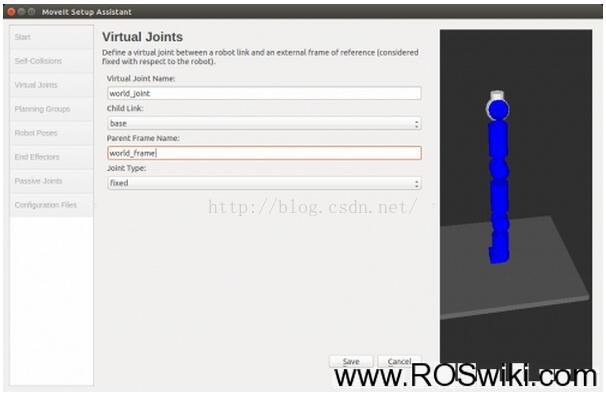
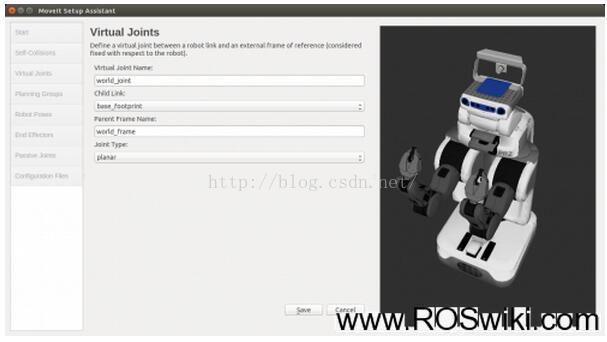
2.2.3 ДДНЈащФтЙиНк (Virtual Joints)
дкSetup Assistant ЕкШ§ЯюVirtual JointsРяУцЃЌЮвУЧвЊДДНЈЫљЮНЕФащФтЙиНкЁЃетИіащФтЙиНкЃЌПЩвдРэНтЮЊвЛИіСЌНгЛњЦїШЫКЭЪРНчЕФЙиНкЁЃ
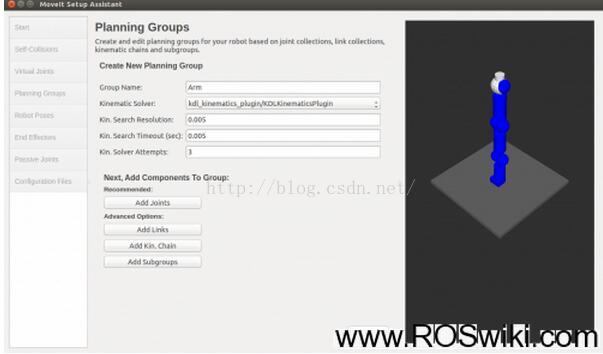
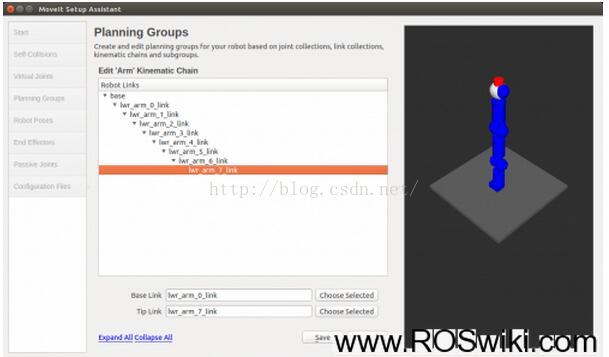
- Group Name: ВЛгУЖрЫЕЃЌУћзжЁЃЁЃЁЃЮвУЧОЭНаArmЁЃ
- Kinematic Solver: дЫЖЏбЇЧѓНтЙЄОпЃЌетИіОЭЪЧИКд№ЧѓНте§ЯђдЫЖЏбЇ(Forward Kinematics)КЭФцдЫЖЏбЇ(IK, Мћ1.3Нк)ЕФЁЃ вЛАуЮвУЧбЁгУKDLЃЌ The Kinematics and Dynamics LibraryЁЃетЪЧвЛИідЫЖЏбЇгыЖЏСІбЇЕФПтЃЌПЩвдКмКУЕФНтОі6здгЩЖШвдЩЯЕФЕЅСДЛњаЕНсЙЙЕФе§ФцдЫЖЏбЇЮЪЬтЁЃЕБШЛФувВПЩвдгУЦфЫћIK Solver, БШШчSRVЛђеп<span \ЁБ=ЁБЁБ style=ЁБbox-sizing: border-box;ЁБ>IK_FASTЃЌЩѕжСФуПЩвдздМКПЊЗЂаТЕФSolverШЛКѓВхШыНјРДЃЌШчЙћгаПеЃЌЮввдКѓЛсЗЂЬћНВНтШчКЮДДНЈаТЕФдЫЖЏбЇЧѓНтПтВЂВхШыЕНMoveItЁЃ
- Kin. Search Resolution: ЙиНкПеМфЕФВЩбљУмЖШ
- Kin. Search TImeout: ЧѓНтЪБМф
- Kin. Solver Attempts: ЧѓНтЪЇАмГЂЪдДЮЪ§ЃЌвЛАуРДЫЕетШ§ЯюЪЙгУФЌШЯжЕОЭПЩвдЁЃФувВПЩвдИљОнОпЬхашвЊзіГіЪЪЕБЕїећЁЃ
2.2.5 ДДНЈЛњЦїШЫдЄЩшЮЛзЫ (Robot Poses)

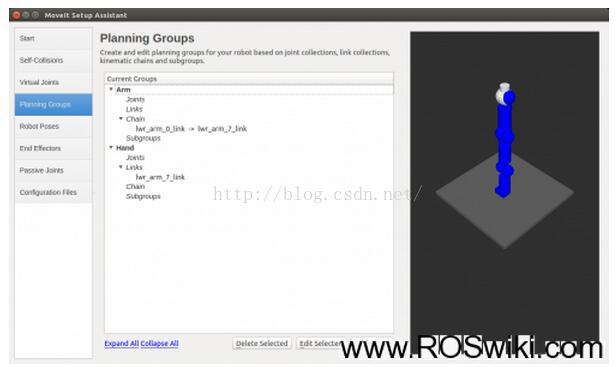
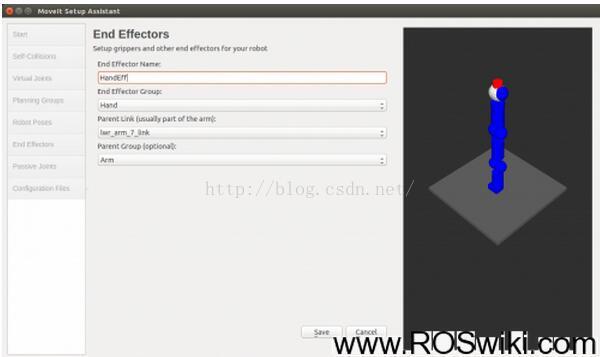
2.2.6 ХфжУжеЖЫПижЦЦї(End Effectors)
2.2.7 ХфжУБЛЖЏЙиНк(Passive Joints)
ЫљЮНБЛЖЏЙиНкЃЌОЭЪЧжИЯжЪЕжаВЛХфжУЕчЛњЕФЙиНкЃЌвВОЭЪЧВЛЛсГіЯждкЛњЦїШЫЕФJoint State MsgРяЃЌвдБмУтMoveItгыJointStateГіЯжЦЅХфДэЮѓЁЃетРяЮвУЧЕФLWRЛњаЕБлВЂУЛгаДЫРрБЛЖЏЙиНкЃЌЫљвдПЩвджБНгЬјЙ§ЁЃ
2.2.8 ЩњГЩХфжУЮФМў(Configuration Files)
зюКѓвЛВНЃЌдкConfiguration Package Save PathРяУцбЁдёвЛИіБЃДцЕижЗЃЌвЛАуЮвУЧАбЫћЗХдкpath_to_catkin_ws/src/lwr_moveit_config ШЛКѓЕуЛїGenerate PackageЃЌетбљвЛИіЭъећЕФMoveIt Configuration PackageОЭДДНЈКУСЫЃЁ ЯШВЛвЊМБзХдЫааЃЌЮвУЧЯШРДПДПДЖМЩњГЩСЫФФаЉЖЋЮїЃЌЛЙгавЛаЉживЊЕФХфжУВЮЪ§ЖМЪЧдкФФЖЈвхЕФЁЃ
Ш§. MoveIt ХфжУАќЯъНт
ДђПЊИеИеДДНЈКУЕФlwr_moveit_configЮФМўМаЃЌЮвУЧЗЂЯжгаconfigКЭlaunchСНИіЮФМўМаЁЃ 3.1 MoveIt! ХфжУЮФМў ЯШПДconfigЃЌРяУцга
- fake_controllers.yamlЃКетЪЧащФтПижЦЦїХфжУЮФМўЃЌЗНБуЮвУЧдкУЛгаЪЕЬхЛњЦїШЫЃЌЩѕжСУЛгаШЮКЮФЃФтЦїЃЈШчgazeboЃЉПЊЦєЕФЧщПіЯТвВФмдЫааMoveItЁЃ
- joint_limits.yamlЃКетРяМЧТМСЫЛњЦїШЫИїИіЙиНкЕФЮЛжУЫйЖШМгЫйЖШЕФМЋЯоЃЌетаЉЖМЛсБЛгУгквдКѓЕФЙцЛЎжаЁЃ
- kinematics.yamlЃКетРяОЭЪЧЩЯвЛеТ2.2.4РяУцЩшжУЕФЖЋЮїЃЌгУгкГѕЪМЛЏдЫЖЏбЇЧѓНтПт
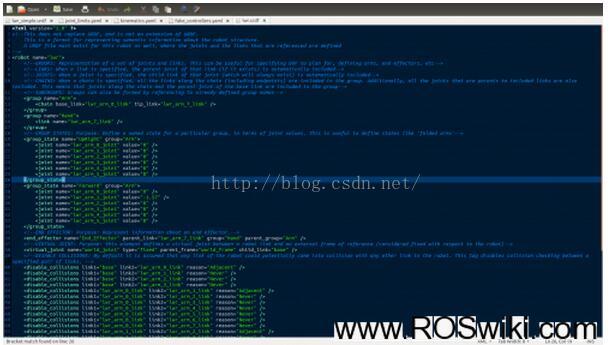
- lwr.srdfЃКетИіЪЧвЛИіживЊЕФMoveItХфжУЮФМўЃЌЮвУЧНЋдкЯТвЛНкЯъНтЁЃ
- ompl_planning.yamlЃКетРяЪЧХфжУOMPLИїжжЫуЗЈЕФИїжжВЮЪ§ЁЃ
SRDFЪЧmoveitЕФХфжУЮФМўЃЌХфКЯURDFЪЙгУЁЃДђПЊlwr.srdfЃЌ
ЯТУцЃЌЮвУЧПДПДlaunchЮФМўМаЃЌвЛДђПЊЗЂЯжгаКмЖрЮФМўЃЌЫВМфВЛЯыПДСЫЁЃЁЃВЛвЊМБЃЌЮвУЧРДПДПДМИИіживЊЕФЮФМўЁЃ
3.3.1 demo.launch
demoЪЧдЫааЕФзмНсЕуЃЌДђПЊЮвУЧПЩвдПДЕНЫћincludeСЫЦфЫћЕФlaunchЮФМўЁЃЦфжаЕк14ааЫЕЃЌШчЙћгаашвЊЃЌЗЂВМОВЬЌЕФtfЁЃБШШчЫЕЃЌФуЕФЛњЦїШЫЛљзљВЛдкЪРНчзјБъЕФдЕуЃЌФуПЩвдЗЂВМвЛИіОВЬЌtfРДУшЪіЛњЦїШЫдкЪРНчзјБъжаЕФЮЛжУЁЃЕк17-21ааЃЌОЭЪЧЮвУЧЗЂВМащФтЛњЦїШЫзДЬЌЕФЕиЗНСЫЃЌЕБШЛЃЌШчЙћФугаЪЕЬхЛњЦїШЫЛђепгаgazeboжЎРрЕФФЃФтЦїЃЌФуашвЊШЅЕєетвЛВПЗжЃЌгаЦфЫћЯргІЕФНкЕуРДЗЂВМЛњЦїШЫзДЬЌЁЃ26-32аадЫааСЫСэвЛИіmoveitживЊЕФНкЕуЃЌmove
groupЁЃ
3.3.2 move_group.launch
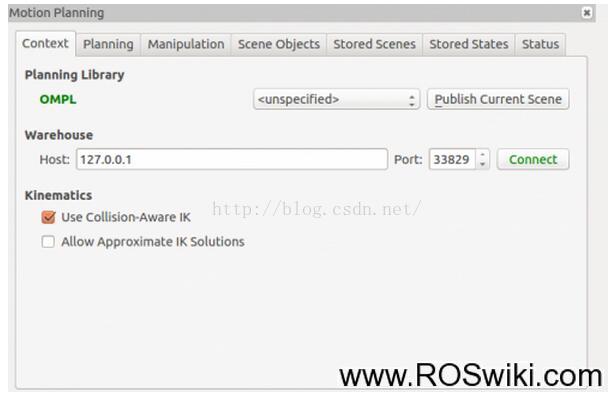
ЙЫУћЫМвхЃЌmove groupЕФЙІФмЪЧШУвЛИіЙцЛЎзщШКЖЏЦ№РДЁЃдѕУДЖЏЃЌФЧОЭвЊзідЫЖЏЙцЛЎСЫЃЌдкmove_group.launchЕк24-26ааЖЈвхСЫдЫЖЏЙцЛЎПтЕФЪЙгУЃЌЮвУЧПЩвдПДЕНЃЌФЌШЯЕФЪЧЪЙгУomplдЫЖЏЙцЛЎПтЁЃЭЌбљЕФЃЌШчЙћвдКѓгаЪБМфЃЌЮвЛсЗЂЬћЯъНтШчКЮДДНЈаТЕФдЫЖЏЙцЛЎПтВхМўВЂШУmoveitЪЙгУЦфЫћЕФдЫЖЏЙцЛЎЫуЗЈЁЃЦфЫћЕФЖМЪЧЩшжУвЛаЉЛљБОВЮЪ§ЃЌднЪБПЩвдТдЙ§ЁЃ
3.3.3 planning_context.launch
етРяЮвУЧПЩвдПДЕНЃЌЖЈвхСЫЫљЪЙгУЕФurdfКЭsrdfЮФМўЃЌвдМАдЫЖЏбЇЧѓНтПтЁЃВЛНЈвщЪжЖЏИќИФетаЉЃЌЕЋЪЧШчЙћФуашвЊЪЙгУВЛЭЌЕФurdfЃЌsrdfЃЌПЩвддкетРяИќИФЁЃ
3.3.4 setup_assistant.launch
ШчЙћФуашвЊИќИФвЛаЉХфжУЃЌФЧУДПЩвджБНгдЫаа
ИДжЦДњТы
|
1
|
roslaunch lwr_moveit_config setup_assistant.launch
|
етбљОЭПЩвдЛљгкЕБЧАЩшжУзіИќИФЃЌЖјВЛЪЧжиаТЩшжУЁЃ
ЫФ. дЫааMoveIt!
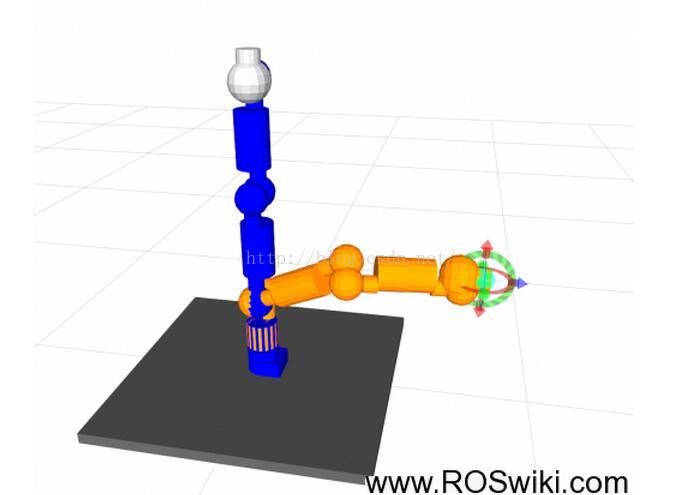
4.1 Launch Demo
ЯждкЮвУЧПЩвдРДГЂЪддЫааmoveitСЫЃЁ
ИДжЦДњТы
|
1
|
roslaunch lwr_moveit_config demo.launch
|
ЕШД§МИУыЃЌЕБПДЕН All is well! Everyone is happy! You can start planning now! ЕФЪБКђЃЌОЭДњБэЦєЖЏГЩЙІСЫЁЃЮвУЧПЩвдПДЕНвЛИіRivzДАПкЃЌзѓЯТНЧгавЛИідЫЖЏЙцЛЎMotionPlanningФЃПщЁЃ
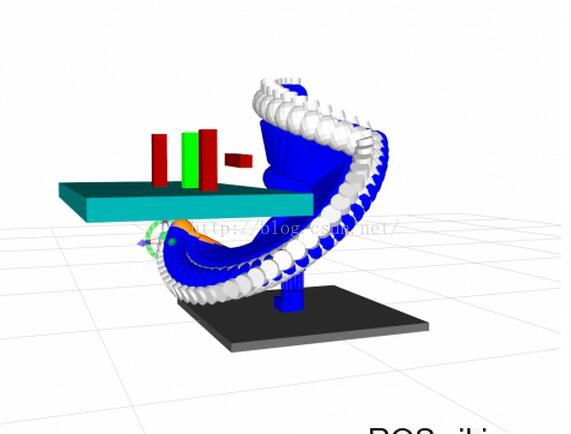
4.3 дЫЖЏЙцЛЎжегкЃЌЕНСЫдЫЖЏЙцЛЎЕФЪБКђСЫЁЃЁЃдкPlanningзгФЃПщжаЕЅЛїPlanЃЌвЛИідЫЖЏЙьМЃОЭЛсГіЯжгыRvizДАПкжаВЂбЛЗВЅЗХЁЃФуПЩвддкDisplay->MotionPlanning->Planned
PathРяУцЩшжУИїжжЯдЪОВЮЪ§ЁЃ

ИДжЦДњТы
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
|
[ INFO] [1453481861.884163555]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884336258]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884489778]: LBKPIECE1: Starting planning with 1 states already in datastructure
[ INFO] [1453481861.884523826]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884547702]: LBKPIECE1: Starting planning with 1 states already in datastructure
[ INFO] [1453481861.884564358]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884587404]: LBKPIECE1: Starting planning with 1 states already in datastructure
[ INFO] [1453481861.884604829]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884626253]: LBKPIECE1: Starting planning with 1 states already in datastructure
[ INFO] [1453481861.905034917]: LBKPIECE1: Created 99 (46 start + 53 goal) states in 88 cells (45 start (45 on boundary) + 43 goal (43 on boundary))
[ INFO] [1453481861.905633020]: LBKPIECE1: Created 87 (33 start + 54 goal) states in 76 cells (31 start (31 on boundary) + 45 goal (45 on boundary))
[ INFO] [1453481861.913846457]: LBKPIECE1: Created 126 (76 start + 50 goal) states in 115 cells (75 start (75 on boundary) + 40 goal (40 on boundary))
[ INFO] [1453481861.914639489]: LBKPIECE1: Created 220 (72 start + 148 goal) states in 201 cells (70 start (70 on boundary) + 131 goal (131 on boundary))
[ INFO] [1453481861.948016518]: ParallelPlan::solve(): Solution found by one or more threads in 0.063719 seconds
|
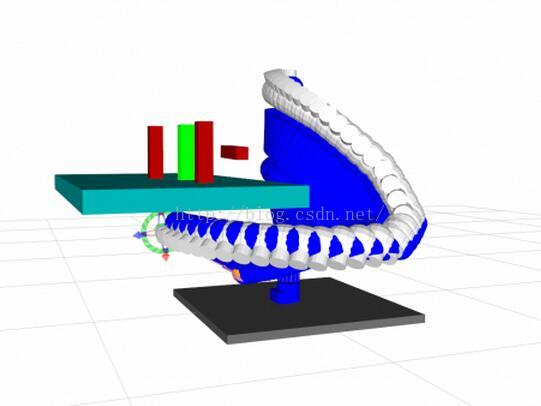
ЮвУЧПЩвдПДЕНЃЌБОДЮдЫЖЏЙцЛЎЪЙгУСЫLBKPIECEЫуЗЈЃЌВЂЧвЪЙгУСЫ4ЯпГЬВЂааЙцЛЎЃЌЙцЛЎЪБМфЮЊ 0.063719УыЁЃФувВПЩвддкOMPLЫуЗЈРябЁдёЦфЫћЙцЛЎЫуЗЈБШШчRRTЃЌRRT-ConnectЃЌPRMЃЌESTЕШЕШЕШЕШЁЃЁЃПДПДЫћУЧжЎМфЕФЙьМЃЧјБ№КЭЫйЖШЧјБ№ЁЃ
ИДжЦДњТы
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
|
(noname)+++++
* obs1.dae
1
mesh
24 12
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 0.0315993
0 1 2
1 3 2
4 5 6
4 7 5
8 9 10
11 8 10
12 13 14
12 14 15
16 17 18
19 16 18
20 21 22
20 22 23
0.7 0 0.8
0.706825 0 0 0.707388
0.5 0 0 1
* obs2.dae
1
mesh
24 12
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 0.0315993
0 1 2
1 3 2
4 5 6
4 7 5
8 9 10
11 8 10
12 13 14
12 14 15
16 17 18
19 16 18
20 21 22
20 22 23
0.6 0.5 0.8
0.706825 0 0 0.707388
0.5 0 0 1
* obs3.dae
1
mesh
24 12
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 0.0315993
0 1 2
1 3 2
4 5 6
4 7 5
8 9 10
11 8 10
12 13 14
12 14 15
16 17 18
19 16 18
20 21 22
20 22 23
0.3 0 0.8
0.999784 0 0 0.0207948
0.5 0 0 1
* table.dae
1
mesh
24 12
-0.420619 0.0420619 -0.841237
-0.420619 -0.0420619 -0.841237
-0.420619 0.0420619 0.841237
-0.420619 -0.0420619 0.841237
0.420619 0.0420619 0.841237
0.420619 -0.0420619 -0.841237
0.420619 0.0420619 -0.841237
0.420619 -0.0420619 0.841237
-0.420619 0.0420619 0.841237
-0.420619 -0.0420619 0.841237
0.420619 -0.0420619 0.841237
0.420619 0.0420619 0.841237
0.420619 -0.0420619 -0.841237
-0.420619 -0.0420619 -0.841237
-0.420619 0.0420619 -0.841237
0.420619 0.0420619 -0.841237
-0.420619 -0.0420619 0.841237
-0.420619 -0.0420619 -0.841237
0.420619 -0.0420619 -0.841237
0.420619 -0.0420619 0.841237
0.420619 0.0420619 -0.841237
-0.420619 0.0420619 -0.841237
-0.420619 0.0420619 0.841237
0.420619 0.0420619 0.841237
0 1 2
1 3 2
4 5 6
4 7 5
8 9 10
8 10 11
12 13 14
15 12 14
16 17 18
19 16 18
20 21 22
20 22 23
0.7 0 0.63
0.706825 0 0 0.707388
0 0.5 0.5 1
* target
1
mesh
24 12
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
-0.0315993 -0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 -0.126397 0.0315993
-0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 -0.0315993
0.0315993 -0.126397 0.0315993
0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 -0.0315993
-0.0315993 0.126397 0.0315993
0.0315993 0.126397 0.0315993
0 1 2
1 3 2
4 5 6
4 7 5
8 9 10
11 8 10
12 13 14
12 14 15
16 17 18
19 16 18
20 21 22
20 22 23
0.6 0.2 0.8
0.706825 0 0 0.707388
0 1 0 1
.
|
НгЯТРДПЩвдГЂЪдВЛЭЌЕФOMPLЫуЗЈЃЌВЛЭЌЕФФПБъЮЛзЫКЭВЛЭЌЕФЛЗОГЁЃРДПДПДMoveItЕФТГАєадШчКЮЁЃ
ФЧУДЃЌMoveIt!КЭOMPLЕФдЫЖЏЙцЛЎОЭВюВЛЖрНВЭъСЫЃЌЕБШЛетЪЧКмЧГЯдЕФЃЌгыЪЕгУадЕФЖЋЮїЖМЛЙгаОрРыЁЃвдЩЯЖМЪЧДПЪжДђЃЌЯжзіЕФР§згЃЌЯЃЭћгаЫљАяжњЁЃНгЯТРДИУНВЪВУДЃЌФуУЧПЩвддкЯТУцСєбдЃЌЪЧИќЩюШыЕФНВMoveIt!ЃЌЛЙЪЧНВOMPLдЫЖЏЙцЛЎЫуЗЈЃЌЛЙЪЧНВШчКЮФЃФтОпЬхЪЕР§ЁЃ