Windows10��VS2013+PCL1.8��������
�ջ��˻�����PCL��Windows���价��ʵ����̫�����ˣ��ϴ�û�м�¼���õĹ��̣������ֵø����ѽ̳̣��ؼ��Ǻܶ����д�Ľ̶̳�������������֪��д��һ�����Ե����÷������˿���������һ����̬�������һ��Ҫ��ϸ��������
���ù���
-
���ذ�װPCL
����PCL-1.8.0-AllInOne-msvc2013-win64����װ��һֱ��һ���ͺá�ע�⣺��;�ᵯ����װOpenNI�Ŀ����ǽ�OpenNI��װ��PCL��װĿ¼��3rdParty\OpenNI2�
�������ӣ�http://pan.baidu.com/s/1hrAhLK4 ���룺1evw -
����ϵͳ������
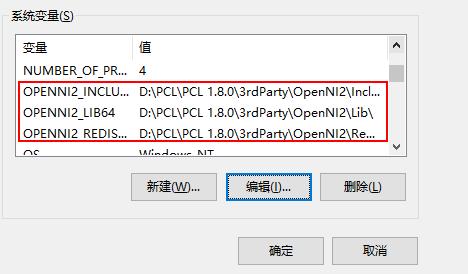
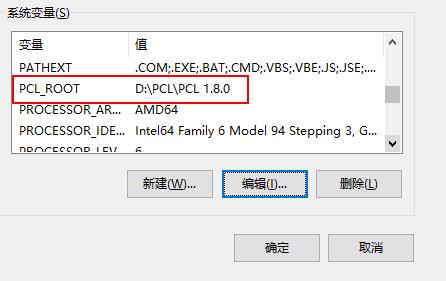
��װ�ú��Զ��������¼���������
���ţ�������Ҫ�Լ��������¼���������
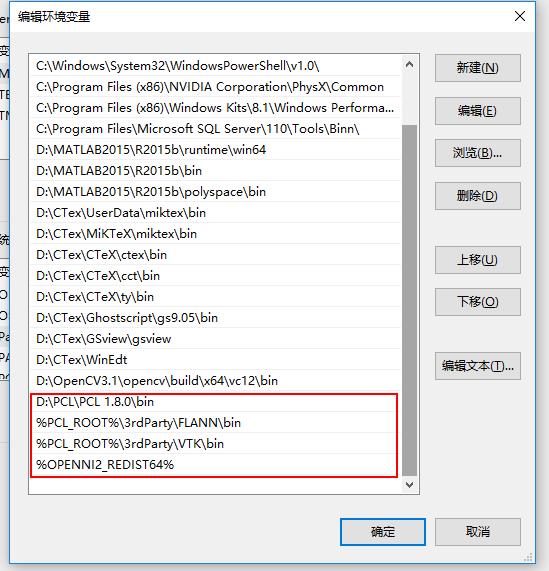
������path����һ���ǰ�װ���Լ��ӵģ�������Ҫ�ֶ��������������� -
������Ŀ���������ļ�
��1���½�һ������Ŀ������Ŀ���ó�64λ�����ûʲô��˵�ġ�
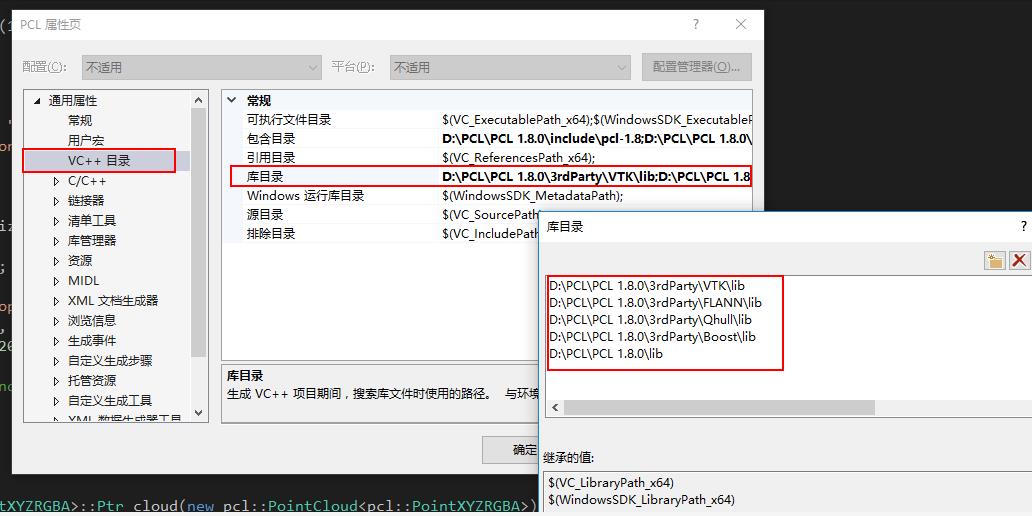
��2���л����Թ���������Debug|64����������Ŀ���Ա���ȡ��PCL��
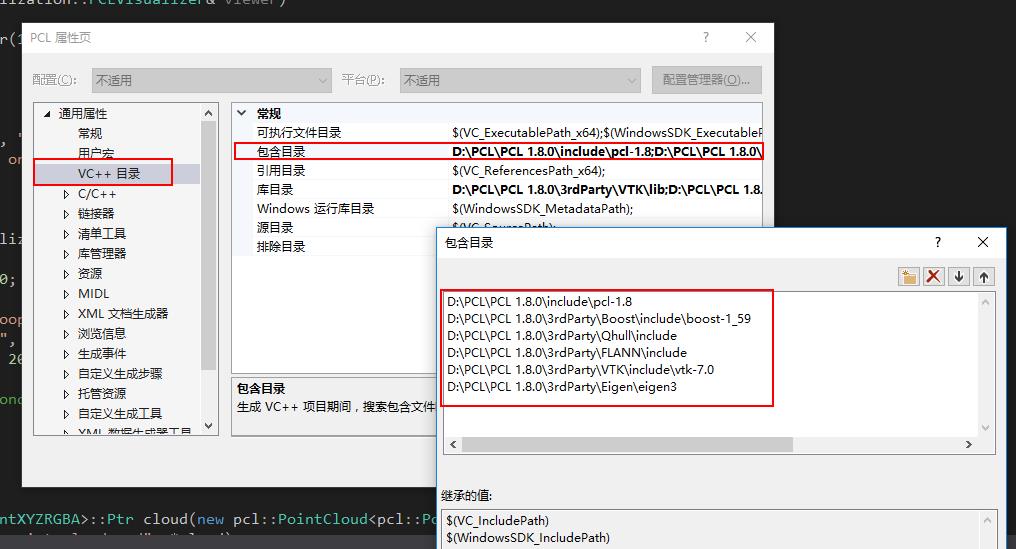
���VC++Ŀ¼������Ŀ¼������ͼ��
���VC++Ŀ¼����Ŀ¼������ͼ��
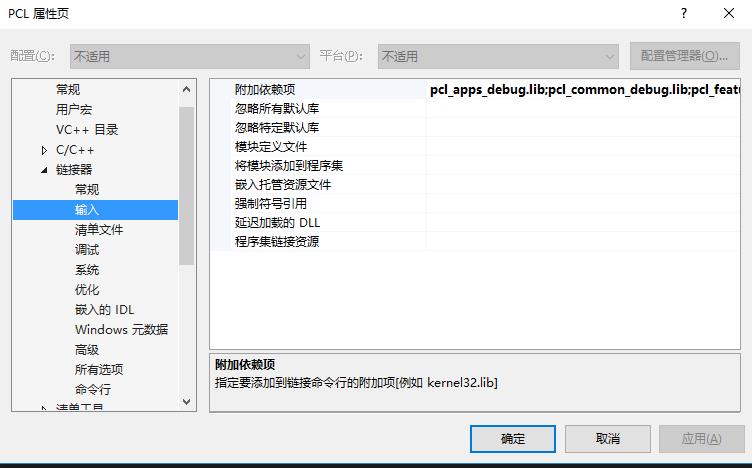
���������-���룬���������
�������£�
pcl_apps_debug.lib
pcl_common_debug.lib
pcl_features_debug.lib
pcl_filters_debug.lib
pcl_io_ply_debug.lib
pcl_io_debug.lib
pcl_kdtree_debug.lib
pcl_keypoints_debug.lib
pcl_ml_debug.lib
pcl_octree_debug.lib
pcl_outofcore_debug.lib
pcl_people_debug.lib
pcl_recognition_debug.lib
pcl_registration_debug.lib
pcl_sample_consensus_debug.lib
pcl_search_debug.lib
pcl_segmentation_debug.lib
pcl_simulation_debug.lib
pcl_stereo_debug.lib
pcl_surface_debug.lib
pcl_tracking_debug.lib
pcl_visualization_debug.lib
libboost_atomic-vc120-mt-gd-1_59.lib
libboost_chrono-vc120-mt-gd-1_59.lib
libboost_container-vc120-mt-gd-1_59.lib
libboost_context-vc120-mt-gd-1_59.lib
libboost_coroutine-vc120-mt-gd-1_59.lib
libboost_date_time-vc120-mt-gd-1_59.lib
libboost_exception-vc120-mt-gd-1_59.lib
libboost_filesystem-vc120-mt-gd-1_59.lib
libboost_graph-vc120-mt-gd-1_59.lib
libboost_iostreams-vc120-mt-gd-1_59.lib
libboost_locale-vc120-mt-gd-1_59.lib
libboost_log-vc120-mt-gd-1_59.lib
libboost_log_setup-vc120-mt-gd-1_59.lib
libboost_math_c99-vc120-mt-gd-1_59.lib
libboost_math_c99f-vc120-mt-gd-1_59.lib
libboost_math_c99l-vc120-mt-gd-1_59.lib
libboost_math_tr1-vc120-mt-gd-1_59.lib
libboost_math_tr1f-vc120-mt-gd-1_59.lib
libboost_math_tr1l-vc120-mt-gd-1_59.lib
libboost_mpi-vc120-mt-gd-1_59.lib
libboost_prg_exec_monitor-vc120-mt-gd-1_59.lib
libboost_program_options-vc120-mt-gd-1_59.lib
libboost_random-vc120-mt-gd-1_59.lib
libboost_regex-vc120-mt-gd-1_59.lib
libboost_serialization-vc120-mt-gd-1_59.lib
libboost_signals-vc120-mt-gd-1_59.lib
libboost_system-vc120-mt-gd-1_59.lib
libboost_test_exec_monitor-vc120-mt-gd-1_59.lib
libboost_thread-vc120-mt-gd-1_59.lib
libboost_timer-vc120-mt-gd-1_59.lib
libboost_unit_test_framework-vc120-mt-gd-1_59.lib
libboost_wave-vc120-mt-gd-1_59.lib
libboost_wserialization-vc120-mt-gd-1_59.lib
flann-gd.lib
flann_cpp_s-gd.lib
flann_s-gd.lib
qhull-gd.lib
qhullcpp-gd.lib
qhullstatic-gd.lib
qhullstatic_r-gd.lib
qhull_p-gd.lib
qhull_r-gd.lib
vtkalglib-7.0-gd.lib
vtkChartsCore-7.0-gd.lib
vtkCommonColor-7.0-gd.lib
vtkCommonComputationalGeometry-7.0-gd.lib
vtkCommonCore-7.0-gd.lib
vtkCommonDataModel-7.0-gd.lib
vtkCommonExecutionModel-7.0-gd.lib
vtkCommonMath-7.0-gd.lib
vtkCommonMisc-7.0-gd.lib
vtkCommonSystem-7.0-gd.lib
vtkCommonTransforms-7.0-gd.lib
vtkDICOMParser-7.0-gd.lib
vtkDomainsChemistry-7.0-gd.lib
vtkDomainsChemistryOpenGL2-7.0-gd.lib
vtkexoIIc-7.0-gd.lib
vtkexpat-7.0-gd.lib
vtkFiltersAMR-7.0-gd.lib
vtkFiltersCore-7.0-gd.lib
vtkFiltersExtraction-7.0-gd.lib
vtkFiltersFlowPaths-7.0-gd.lib
vtkFiltersGeneral-7.0-gd.lib
vtkFiltersGeneric-7.0-gd.lib
vtkFiltersGeometry-7.0-gd.lib
vtkFiltersHybrid-7.0-gd.lib
vtkFiltersHyperTree-7.0-gd.lib
vtkFiltersImaging-7.0-gd.lib
vtkFiltersModeling-7.0-gd.lib
vtkFiltersParallel-7.0-gd.lib
vtkFiltersParallelImaging-7.0-gd.lib
vtkFiltersProgrammable-7.0-gd.lib
vtkFiltersSelection-7.0-gd.lib
vtkFiltersSMP-7.0-gd.lib
vtkFiltersSources-7.0-gd.lib
vtkFiltersStatistics-7.0-gd.lib
vtkFiltersTexture-7.0-gd.lib
vtkFiltersVerdict-7.0-gd.lib
vtkfreetype-7.0-gd.lib
vtkGeovisCore-7.0-gd.lib
vtkglew-7.0-gd.lib
vtkGUISupportQt-7.0-gd.lib
vtkGUISupportQtSQL-7.0-gd.lib
vtkhdf5-7.0-gd.lib
vtkhdf5_hl-7.0-gd.lib
vtkImagingColor-7.0-gd.lib
vtkImagingCore-7.0-gd.lib
vtkImagingFourier-7.0-gd.lib
vtkImagingGeneral-7.0-gd.lib
vtkImagingHybrid-7.0-gd.lib
vtkImagingMath-7.0-gd.lib
vtkImagingMorphological-7.0-gd.lib
vtkImagingSources-7.0-gd.lib
vtkImagingStatistics-7.0-gd.lib
vtkImagingStencil-7.0-gd.lib
vtkInfovisCore-7.0-gd.lib
vtkInfovisLayout-7.0-gd.lib
vtkInteractionImage-7.0-gd.lib
vtkInteractionStyle-7.0-gd.lib
vtkInteractionWidgets-7.0-gd.lib
vtkIOAMR-7.0-gd.lib
vtkIOCore-7.0-gd.lib
vtkIOEnSight-7.0-gd.lib
vtkIOExodus-7.0-gd.lib
vtkIOExport-7.0-gd.lib
vtkIOGeometry-7.0-gd.lib
vtkIOImage-7.0-gd.lib
vtkIOImport-7.0-gd.lib
vtkIOInfovis-7.0-gd.lib
vtkIOLegacy-7.0-gd.lib
vtkIOLSDyna-7.0-gd.lib
vtkIOMINC-7.0-gd.lib
vtkIOMovie-7.0-gd.lib
vtkIONetCDF-7.0-gd.lib
vtkIOParallel-7.0-gd.lib
vtkIOParallelXML-7.0-gd.lib
vtkIOPLY-7.0-gd.lib
vtkIOSQL-7.0-gd.lib
vtkIOVideo-7.0-gd.lib
vtkIOXML-7.0-gd.lib
vtkIOXMLParser-7.0-gd.lib
vtkjpeg-7.0-gd.lib
vtkjsoncpp-7.0-gd.lib
vtklibxml2-7.0-gd.lib
vtkmetaio-7.0-gd.lib
vtkNetCDF-7.0-gd.lib
vtkNetCDF_cxx-7.0-gd.lib
vtkoggtheora-7.0-gd.lib
vtkParallelCore-7.0-gd.lib
vtkpng-7.0-gd.lib
vtkproj4-7.0-gd.lib
vtkRenderingAnnotation-7.0-gd.lib
vtkRenderingContext2D-7.0-gd.lib
vtkRenderingContextOpenGL2-7.0-gd.lib
vtkRenderingCore-7.0-gd.lib
vtkRenderingFreeType-7.0-gd.lib
vtkRenderingImage-7.0-gd.lib
vtkRenderingLabel-7.0-gd.lib
vtkRenderingLOD-7.0-gd.lib
vtkRenderingOpenGL2-7.0-gd.lib
vtkRenderingQt-7.0-gd.lib
vtkRenderingVolume-7.0-gd.lib
vtkRenderingVolumeOpenGL2-7.0-gd.lib
vtksqlite-7.0-gd.lib
vtksys-7.0-gd.lib
vtktiff-7.0-gd.lib
vtkverdict-7.0-gd.lib
vtkViewsContext2D-7.0-gd.lib
vtkViewsCore-7.0-gd.lib
vtkViewsInfovis-7.0-gd.lib
vtkViewsQt-7.0-gd.lib
vtkzlib-7.0-gd.lib
�ϱߵİ���Ŀ¼����Ŀ¼�����Լ�������������������Щ��汾��ͬ����ͬ�Ľ���ȥ�������ġ���
-
��Ŀ����Ŀ¼����
�Ҽ�������������ԣ�����������ԨC���ԣ��Ҳ������Ϊ��
PATH=$(PCL_ROOT)\bin;$(PCL_ROOT)\3rdParty\FLANN\bin;$(PCL_ROOT)\3rdParty\VTK\bin
;$(PCL_ROOT)\Qhull\bin;$(PCL_ROOT)\3rdParty\OpenNI2\Tools;$(PATH)
��Ϊ�˺���ʾ�����ﻻ��һ���У���Ͳ��û����ˣ�һ�зŽ�ȥ�����Եģ���
����һ��
�½�һ��cpp�ļ����������д��룺
#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>int user_data;void viewerOneOff(pcl::visualization::PCLVisualizer& viewer)
{viewer.setBackgroundColor(1.0, 0.5, 1.0);pcl::PointXYZ o;o.x = 1.0;o.y = 0;o.z = 0;viewer.addSphere(o, 0.25, "sphere", 0);std::cout << "i only run once" << std::endl;}void viewerPsycho(pcl::visualization::PCLVisualizer& viewer)
{static unsigned count = 0;std::stringstream ss;ss << "Once per viewer loop: " << count++;viewer.removeShape("text", 0);viewer.addText(ss.str(), 200, 300, "text", 0);//FIXME: possible race condition here:user_data++;
}int main()
{pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>);pcl::io::loadPCDFile("my_point_cloud.pcd", *cloud);pcl::visualization::CloudViewer viewer("Cloud Viewer");//blocks until the cloud is actually renderedviewer.showCloud(cloud);//use the following functions to get access to the underlying more advanced/powerful//PCLVisualizer//This will only get called onceviewer.runOnVisualizationThreadOnce(viewerOneOff);//This will get called once per visualization iterationviewer.runOnVisualizationThread(viewerPsycho);while (!viewer.wasStopped()){//you can also do cool processing here//FIXME: Note that this is running in a separate thread from viewerPsycho//and you should guard against race conditions yourself...user_data++;}return 0;
}
����֮�����ͼ�������ֿ��Ե���С���ܿ���һ����֤����ɹ��ˣ�
���ˣ����Ǹ������ļ����������ÿ���õ�ʱ�����½���Ŀ�ﵼ��Ϳ����ˡ���