Ŀ¼
- ����Ķ���ת�� ����
-
- ����
- ����ת���Ľ��ٶȺͽǼ��ٶ�
- �ȱ���ת����ʽ
- �����������Ĺ�ϵ
- ����
- ת������ ת������
-
- �ʵ��ת������
- �Ƕ��� �Ƕ����غ㶨��
-
- �Ƕ���
- ���嶨��ת���ĽǶ���
- �������� ���嶨��ת���Ķ��ܶ���
-
- ��������
- �����ƶ���ת���Ķ��ܶ���
����Ķ���ת�� ����
����
����Ķ����������������£���״�ʹ�С���������ı�����塣
������˶���ʽ����ƽ����ת����
ƽ�������������е���˶��켣��������ͬ�������˶�״̬һ������v,a������ʱ������������һ����˶����Դ�������������˶���
����ת���Ľ��ٶȺͽǼ��ٶ�

�����꣺��=��(t)\theta =\theta (t)��=��(t)
��ʱ�룺��>0\theta >0��>0,˳ʱ�룺��<0\theta<0��<0
��λ�ƣ�����=��(t+��t)?��(t)\Delta \theta = \theta (t+\Delta t)-\theta (t)����=��(t+��t)?��(t)
���ٶ�ʸ������=lim?��t��0���Ȧ�t=d��dt\omega = \lim_{\Delta t\to 0}\frac{\Delta \theta}{\Delta t}=\frac{d\theta}{dt} ��=��t��0lim?��t����?=dtd��?��\omega������������������

���嶨��ת����һάת������ת����������ý��ٶȵ�������ʾ��
�Ǽ��ٶȣ���?=d��?dt\vec{\alpha}=\frac{d\vec{\omega}}{dt}��=dtd��?
�ȱ���ת����ʽ
�������ƶ���ת������\alpha��=����ʱ���������ȱ���ת����
| �ʵ�\red{�ʵ�}�����ȱ���ֱ���˶� | ����\red{����}�����ƶ����ȱ���ת�� |
|---|---|
| v=v0+atv=v_0+atv=v0?+at | ��=��0+��t\omega = \omega _0+\alpha t��=��0?+��t |
| x=x0+v0t+12at2x=x_0+v_0t+\frac{1}{2}at^2x=x0?+v0?t+21?at2 | ��=��0+��0t+12��t2\theta = \theta _0+\omega _0t+\frac{1}{2}\alpha t^2��=��0?+��0?t+21?��t2 |
| v2=v02+2a(x?x0)v^2=v_0^2+2a(x-x_0)v2=v02?+2a(x?x0?) | ��2=��02+2��(��?��0)\omega ^2=\omega _0^2+2\alpha (\theta -\theta _0)��2=��02?+2��(��?��0?) |
�����������Ĺ�ϵ

��1��v?=r��e?t\vec{v}=r\omega \vec{e}_tv=r��et?
��2��at=r��,an=r��2a_t=r \alpha,a_n=r\omega ^2at?=r��,an?=r��2
����

�����������������Ը����ת�����õ���������
F?\vec{F}F��ת��z�����ض���Ϊ��M?=r?��F?��M=Frsin��=Fd\vec{M}=\vec{r} \times \vec{F} \to M= Frsin\theta = FdM=r��F��M=Frsin��=Fd����d�����ۡ�
ת������ ת������
�ʵ��ת������

�赥���ʵ�mmm��ת���������
M=rFsin��=rFt=r(mat)=rm(r��)=mr2��=J��M=rFsin\theta = rF_t=r(ma_t)=rm(r\alpha)=mr^2\alpha = J\alphaM=rFsin��=rFt?=r(mat?)=rm(r��)=mr2��=J�����壺J=mr2J=mr^2J=mr2Ϊ�ʵ�mmm��OOO�ġ�ת��������
ת�����������嶨��ת���ĽǼ��ٶ��������ܵ��������������ȣ�������ת�������ɷ��ȡ�
J=��j��mjrj2;J=��r2dmJ=\sum_j \Delta m_jr_j^2;J=\int r^2dmJ=j��?��mj?rj2?;J=��r2dm
(1) M=0,�ز���M=0,\omega ����M=0,������
(2) ����MJ\alpha \propto \frac{M}{J}����JM?
(3) M=J��=Jd��dtM=J\alpha = J\frac{d\omega}{dt}M=J��=Jdtd��?
˵����\red{˵����}˵����
��1��MMM����\alpha��������ͬ
��2��Ϊ˲ʱ��ϵ
��3��ת����M=J��M=J\alphaM=J����ƽ����F=maF=maF=ma��λ��ͬ��
�Ƕ��� �Ƕ����غ㶨��
�Ƕ���

�ʵ���˶�������p?=mv?,Ek=mv2/2\vec{p}=m\vec{v},E_k=mv^2/2p?=mv,Ek?=mv2/2
���嶨��ת��������L=J��,Ek=J��2/2L=J\omega,E_k=J\omega ^2/2L=J��,Ek?=J��2/2
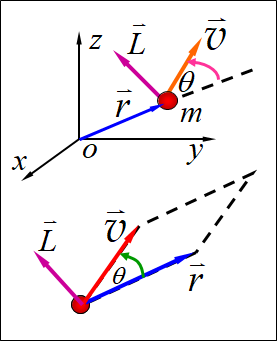
�Ƕ�������������Ϊmmm���ʵ����ٶ�v?\vec{v}v�ڿռ��˶���ijһʱ�̶�O��λʸΪr?\vec{r}r�����ʵ��O�ĽǶ�������Ϊ��
L?=r?��p?=r?��mv?\vec{L}=\vec{r} \times \vec{p}=\vec{r}\times m\vec{v}L=r��p?=r��mv��С��L=rmvsin�ȴ�С��L=rmvsin\theta��С��L=rmvsin��
L?\vec{L}L�ķ���������ַ��Ƕ�����λ��kg?m2?s?1kg\cdot m^2\cdot s^{-1}kg?m2?s?1
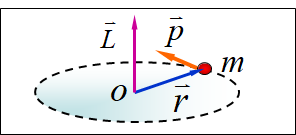
��ͼ���ʵ�����\omega�����뾶Ϊrrr��Բ���˶��������Բ�ĵĽǶ���Ϊ:L=mr2��=J��L=mr^2\omega = J\omegaL=mr2��=J��
�ʵ�ĽǶ���������M?=dL?dt=r?��F?\vec{M}=\frac{d\vec{L}}{dt}=\vec{r}\times \vec{F}M=dtdL?=r��F
�������ʵ�ĺ������Բο���O�����أ������ʵ�Ըõ�O�ĽǶ�����ʱ��ı仯�ʡ�\green{�������ʵ�ĺ������Բο���O�����أ������ʵ�Ըõ�O�ĽǶ�����ʱ��ı仯�ʡ�}��������������������������O����������������������O����������ʱ������������
�ֿɵó����أ�
M?dt=dL??�����أ���t1t2M?dt=L?2?L?1\vec{M}dt=d\vec{L}\Rightarrow �����أ�\int_{t_1}^{t_2}\vec{M}dt=\vec{L}_2-\vec{L}_1Mdt=dL?����������t1?t2??Mdt=L2??L1?
�����ʵ�ĽǶ��������ֿ��Ա���Ϊ����ͬһ�ο���O���ʵ����ܵij����ص����ʵ�Ƕ�����������\green{��ͬһ�ο���O���ʵ����ܵij����ص����ʵ�Ƕ�����������}��ͬһ������O����������������������������������������
����ʽ��֪��
���M?=0����L?=r?��mv?=��ʸ��\vec{M} =0����\vec{L}=\vec{r}\times m\vec{v}=��ʸ��M=0����L=r��mv=��ʸ��
�����ʵ�ĽǶ����غ㶨�ɣ����ʵ����ܺ�������ij������O������Ϊ0�����ʵ��O��ĽǶ������ֲ���\red{���ʵ����ܺ�������ij������O������Ϊ0�����ʵ��O��ĽǶ������ֲ���}������������������ij������O������Ϊ0����������O������������������
���嶨��ת���ĽǶ���
M?dt=dL?=d(J��?)?��t1t2=J��2?J��1\vec{M}dt=d\vec{L}=d(J\vec{\omega})\Rightarrow \int_{t_1}^{t_2}=J\omega _2-J\omega _1Mdt=dL=d(J��)?��t1?t2??=J��2??J��1?
����ת������ĽǶ���������ת���������ܺ������صij������������ʱ����ת������Ƕ�����������
��M=0,��L=J��=������M=0,��L=J\omega =������M=0,��L=J��=����
����ת������ĽǶ����غ㶨�ɣ� ����������ܺ������ص���0�����߲��������ص����ã�����ĽǶ������ֲ��䡣
�������� ���嶨��ת���Ķ��ܶ���
��������

dW=F??dr?=Fcos�ըOdr�O=Ftds=Ftrd��=Md��dW=\vec{F}\cdot d\vec{r}=Fcos\varphi |dr|=F_tds=F_trd\theta =Md\thetadW=F?dr=Fcos���Odr�O=Ft?ds=Ft?rd��=Md��?���صĹ���W=�Ҧ�1��2Md��\Rightarrow���صĹ���W=\int_{\theta _1}^{\theta _2}Md\theta?����������W=����1?��2??Md��
˵����\red{˵����}˵������ν����������ʵ���Ϻ�ʽ���Ĺ��������κι������صĹ����µĶ��壬ֻ���ڸ���ת���У������غͽ�λ�ƵĻ�����ʾ��Ϊ������ѡ�
���صĹ��ʣ�P=dWdt=Md��dt=M��P=\frac{dW}{dt}=M\frac{d\theta}{dt}=M\omegaP=dtdW?=Mdtd��?=M���Ƚϣ�W=��F??dr?;P=F?.v?�Ƚϣ�W=\int \vec{F}\cdot d\vec{r};P=\vec{F}.\vec{v}������W=��F?dr;P=F.v
��M?\vec{M}M����?\vec{\omega}��ͬ����WWW��PPPΪ��
��M?\vec{M}M����?\vec{\omega}��������WWW��PPP��
ת�����ܣ�Ek=��i12��mivi2=12(��i��mivi2)��2=12J��2??????(��Ek=12mv2)�Ƚ�E_k=\sum_i\frac{1}{2}\Delta m_iv_i^2=\frac{1}{2}(\sum_i \Delta m_iv_i^2)\omega ^2=\frac{1}{2}J\omega ^2------(��E_k=\frac{1}{2}mv^2)�Ƚ�Ek?=i��?21?��mi?vi2?=21?(i��?��mi?vi2?)��2=21?J��2??????(��Ek?=21?mv2)����
�����ƶ���ת���Ķ��ܶ���
W=�Ҧ�1��2Mdt=�Ҧ�1��2Jd��dtd��=�Ҧ�1��2J��d��=12J��22?12J��12W=\int_{\theta _1}^{\theta _2}Mdt=\int_{\theta _1}^{\theta _2}J\frac{d\omega}{dt}d\theta=\int_{\omega _1}^{\omega _2}J\omega d\omega=\frac{1}{2}J\omega_2^2-\frac{1}{2}J\omega_1^2W=����1?��2??Mdt=����1?��2??Jdtd��?d��=����1?��2??J��d��=21?J��22??21?J��12?
�Ƚϣ�W=��F?dr?=12mv22?12mv12W=\int \vec{F}d\vec{r}=\frac{1}{2}mv_2^2-\frac{1}{2}mv_1^2W=��Fdr=21?mv22??21?mv12?