���ģ��
��Դ��
- ��Ʈ�������
- ������Դ�ֱ
- ������
- ������������Ȳ�һ
����ϵ����
���ٶȼƣ�
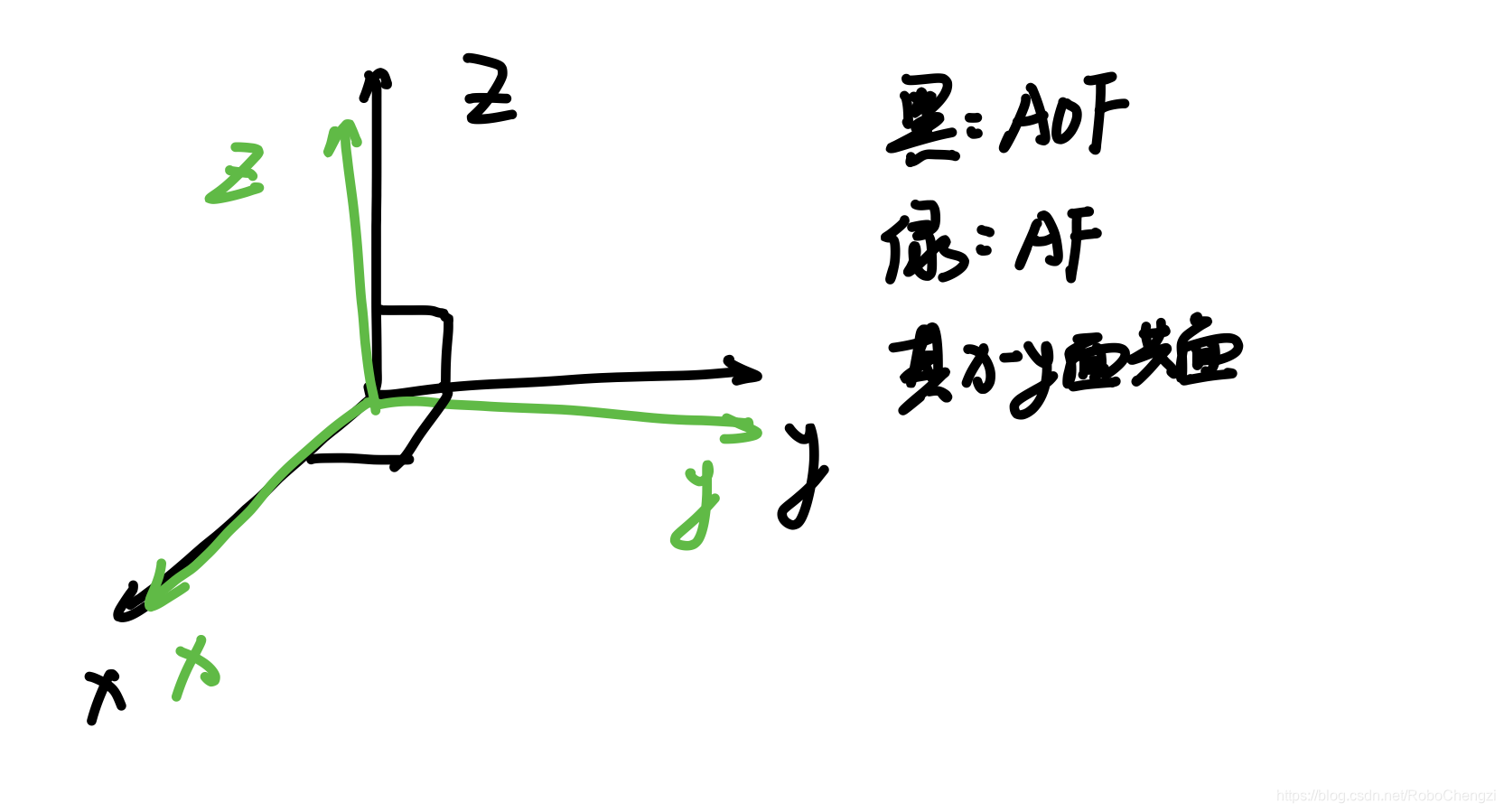
- ԭʼ���������꣺AF����������
- �������������꣺AOF
AOFȷ������
- x��AOF��AF��ͬ
- y��AOF��AF��x��y���ɵ�ƽ����
- z��Ϊx��y���
�����ǣ�
- ԭʼ���������꣺GF����������
- �������������꣺GOF
��������ϵ��BF=AOF
���ģ��ȷ��
�����ֱ
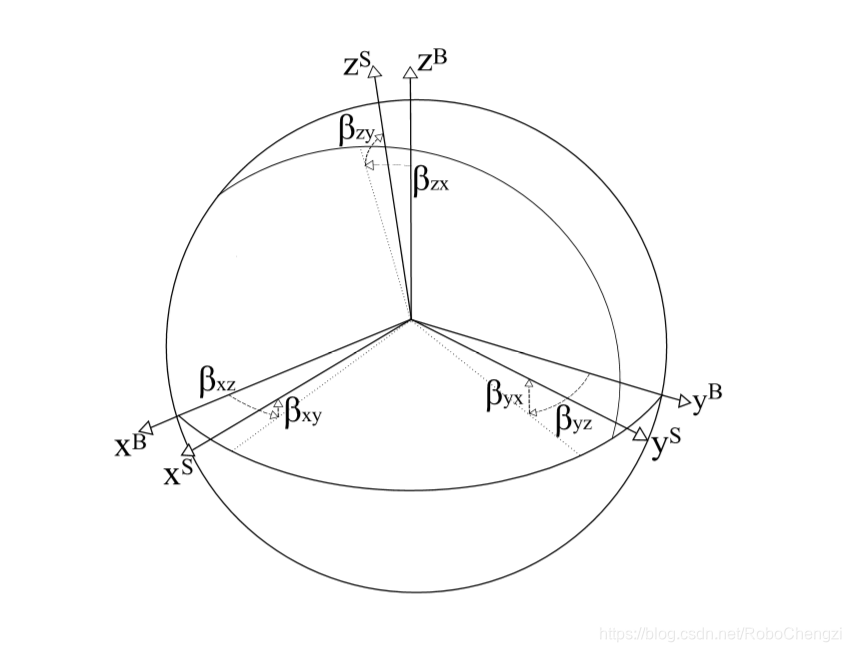
����С�ǶȵIJ���ֱ���ɲ������µı���ο�����18��
s B = T s S T = [ 1 ? �� y z �� z y �� x z 1 ? �� z x ? �� x y �� y x 1 ] s^{B} = Ts^{S} \\ T=\left[\begin{array}{c c c} 1 & -\beta_{yz} &\beta_{zy}\\ \beta_{xz} & 1 &-\beta_{zx}\\ -\beta_{xy}& \beta_{yx} &1\\ \end{array}\right] sB=TsST=???1��xz??��xy???��yz?1��yx??��zy??��zx?1????
����S����ϵΪ����������ϵ��B����ϵΪ��������ϵ����T�и�������ͼΪ���Ƕ�ƫ�
�߶����
�������жȲ�һ�£�ʵ��ֵ����ʵֵ�ı�����
K = [ s x 0 0 0 s y 0 0 0 s z ] K = \left[\begin{array}{c c c} s_x & 0 &0\\ 0 & s_y &0\\ 0& 0 & s_z\\ \end{array}\right] K=???sx?00?0sy?0?00sz?????
��ƫ
b = [ b x b y b z ] b=\left[\begin{array}{c } b_x \\ b_y \\ b_z \\ \end{array}\right] b=???bx?by?bz?????
���յ����ģ��
���ٶȼ�:
a O = T a K a ( a S + b a + v a ) a^O = T^aK^a(a^S+b^a+v^a) aO=TaKa(aS+ba+va)
�����ǣ�
g O = T g K g ( g S + b g + v g ) g^O = T^gK^g(g^S+b^g+v^g) gO=TgKg(gS+bg+vg)
���� v a , v g v^a,v^g va,vgΪ��˹��������
�����㷨ԭ��
�ȹ��Ƽ��ٶȼƵIJ��������ý����õļ��ٶȼ�ȥ���������ǵIJ���
���ٶȼ�
��Ҫ���ƵIJ�����
�� a c c = [ �� y z �� z y �� z x s x a s y a s z a b x a b y a b z a ] \theta^{acc}=\left[\begin{array}{c} \alpha_{yz} & \alpha_{zy} & \alpha_{zx} & s_x^a & s_y^a & s_z^a & b_x^a & b_y^a & b_z^a \end{array}\right] ��acc=[��yz??��zy??��zx??sxa??sya??sza??bxa??bya??bza??]
ע�⣺������������ϵ��BF���ͼ��ٶȼƵ�����ϵ��AOF���غϣ� �� x y , �� y x , �� x z = = 0 \alpha_{xy},\alpha_{yx},\alpha_{xz}==0 ��xy?,��yx?,��xz?==0����˲���Ҫ��һЩ��
��Ҫ˼· :
����������ģ�����䣬������С���˷����Ʋ���ʹ��ÿ�ξ�ֹʱ������ģ���������ӽ���ʵ������С��
����:
L ( �� a c c ) = �� k ? 1 M ( �O �O g �O �O 2 ? �O �O h ( a k s , �� a c c ) �O �O 2 ) 2 L(\theta^{acc}) = \sum_{k-1}^{M}(||g||^2-||h(a_k^s,\theta^{acc})||^2)^2 L(��acc)=k?1��M?(�O�Og�O�O2?�O�Oh(aks?,��acc)�O�O2)2
���� g g gΪ�������ٶȣ� a k s a_k^s aks?Ϊֱ�Ӳ����ļ��ٶȼ�ֵ�� �� a c c \theta^{acc} ��accΪ�����ƵIJ���,���� h ( a k s , �� a c c ) = T a K a ( a S + b a ) h(a_k^s,\theta^{acc})= T^aK^a(a^S+b^a) h(aks?,��acc)=TaKa(aS+ba)
Ȼ���������С��������������LM�㷨��
������
��Ҫ���ƵIJ�����
�� g y r o = [ �� y z �� z y �� x z �� z x �� x y �� y x s x a s y a s z a ] \theta^{gyro}=\left[\begin{array}{c} \gamma_{yz} & \gamma_{zy} & \gamma_{xz} & \gamma_{zx} & \gamma_{xy} & \gamma_{yx} &s_x^a & s_y^a & s_z^a \end{array}\right] ��gyro=[��yz??��zy??��xz??��zx??��xy??��yx??sxa??sya??sza??]
ע�⣺û�й���bias
��Ҫ˼· :
�����������䡣��ʼ״̬ʱ��¼�����������תһ���ǶȺ�ֹ�����������ǻ��ּ���Ԥ����ת���������������ü��ٶȼƼ�����ʵ�����������÷�������С���˵ķ������ϵ��Ż�������ʹ�ö��߲�ֵ��С��
����:
L ( �� g y r o ) = �� k = 2 M ( u a , k ? u g , k ) 2 L(\theta^{gyro}) = \sum_{k=2}^{M}(u_{a,k}-u_{g,k})^2 L(��gyro)=k=2��M?(ua,k??ug,k?)2
���� u a , k , u g , k u_{a,k},u_{g,k} ua,k?,ug,k?�ֱ�Ϊ������Ԥ��������������ٶȼ�ʵ�ⷽ��
�����㷨����
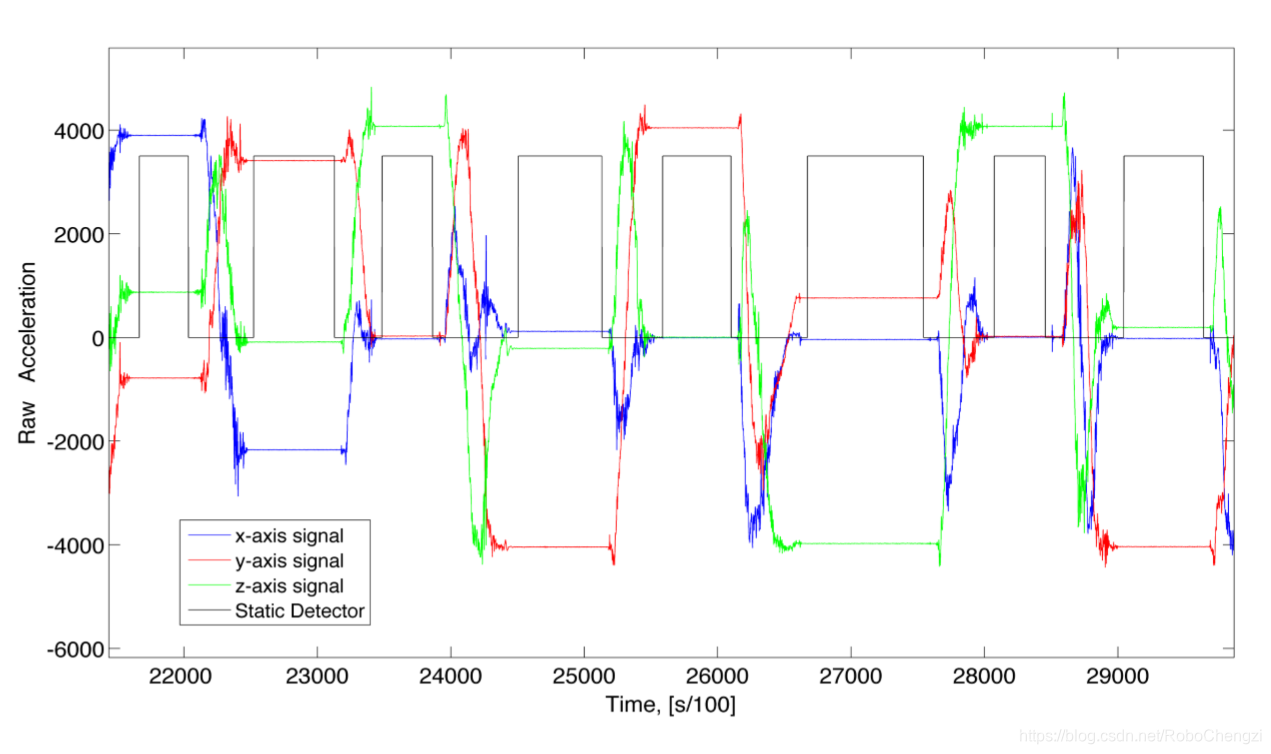
��ֹ���
�����ٶȼ���ǰ2s�ڵķ��������С��һ��ֵ����Ϊ�Ǿ�ֹ�ģ����߲����Ǿ�ֹ��־λ�����жϺ���Ϊ��
s ( t ) = [ v a r ( a x t ) ] 2 + [ v a r ( a y t ) ] 2 + [ v a r ( a z t ) ] 2 s(t) = \sqrt{[var(a_x^t)]^2+[var(a_y^t)]^2+[var(a_z^t)]^2} s(t)=[var(axt?)]2+[var(ayt?)]2+[var(azt?)]2?
����-��������
��Ԫ�����ֵ�һ�ַ���������Ҫ��ֱ�Ӽ�Ҫ��һЩ�������в��õ����Ľ�����-�����֣�����ϸȥ��������¡�
������
��ʼʱ��ֹһ��ʱ����㰬��������������δ��ϸ˵��,��Ҫ���ǵõ��˶�bias���䷽��Ĺ��ơ�
�㷨��������
���Ⱦ�ֹ T w a i t T_{wait} Twait?ʱ�䣬���ư����Ȼ��ѡ��һ���ǶȺ�ֹ�������ظ���һ���̣�����Լ36~50�Σ��Ա�֤�����Ŀɹۣ�����֤ÿ�ξ�ֹʱ����1-4s���������㷨���н�����
��Դ����
https://github.com/Kyle-ak/imu_tk