Android : Camera2/HAL3 框架分析
一、Android O上的Treble机制:
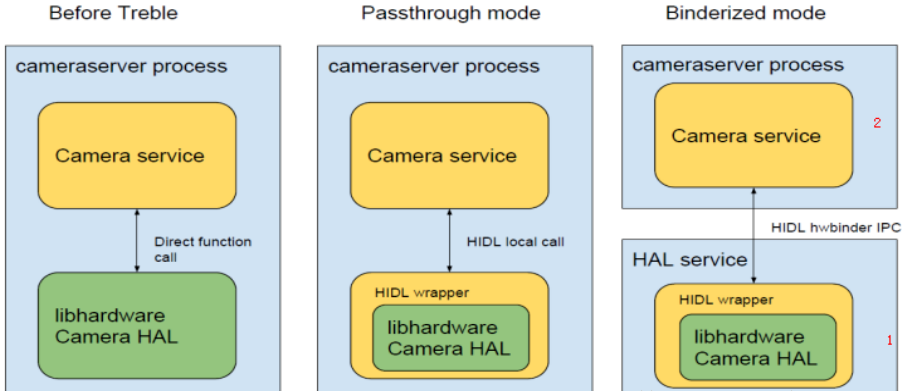
在 Android O 中,系统启动时,会启动一个 CameraProvider 服务,它是从 cameraserver 进程中分离出来,作为一个独立进程 android.hardware.camera.provider@2.4-service 用来控制 camera HAL,cameraserver通过 HIDL 机制于camera provider进行通信。HIDL源自于 Android O 版本加入的 Treble 机制,它的主要功能是将 service 与 HAL 隔离,以方便 HAL 部分进行独立升级,类似于 APP 与 Framework 之间的 Binder 通信机制,通过引入一个进程间通信机制而针对不同层级进行解耦(从 Local call 变成了 Remote call)。如下图:
cameraserver 与 provider 这两个进程启动、初始化的调用逻辑,如下图:

二、Camera HAL3的框架更新:
- Application framework:用于给APP提供访问hardware的Camera API2,通过binder来访问camera service。
- AIDL: 基于Binder实现的一个用于让App fw代码访问natice fw代码的接口。其实现存在于下述路径:frameworks/av/camera/aidl/android/hardware。其中:
(1) ICameraService 是相机服务的接口。用于请求连接、添加监听等。
(2) ICameraDeviceUser 是已打开的特定相机设备的接口。应用框架可通过它访问具体设备。
(3) ICameraServiceListener 和 ICameraDeviceCallbacks 分别是从 CameraService 和 CameraDevice 到应用框架的回调。
- Natice framework:frameworks/av/。提供了ICameraService、ICameraDeviceUser、ICameraDeviceCallbacks、ICameraServiceListener等aidl接口的实现。以及camera server的main函数。
- Binder IPC interface:提供进程间通信的接口,APP和CameraService的通信、CameraService和HAL的通信。其中,AIDL、HIDL都是基于Binder实现的。
- Camera Service:frameworks/av/services/camera/。同APP、HAL交互的服务,起到了承上启下的作用。
- HAL:Google的HAL定义了可以让Camera Service访问的标准接口。对于供应商而言,必须要实现这些接口。
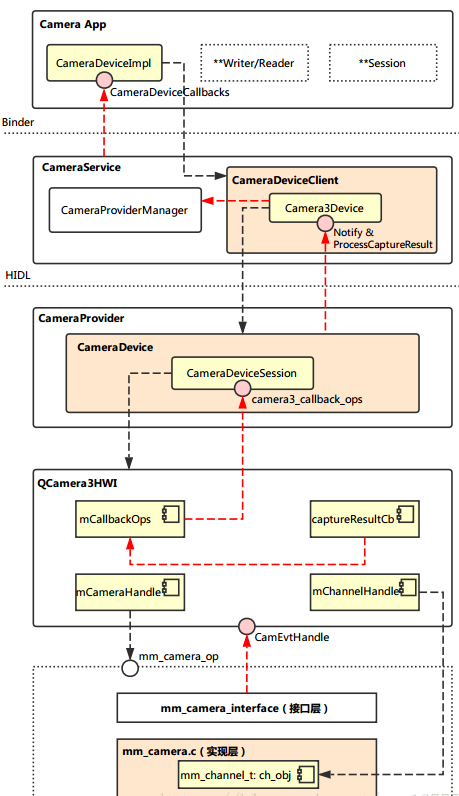
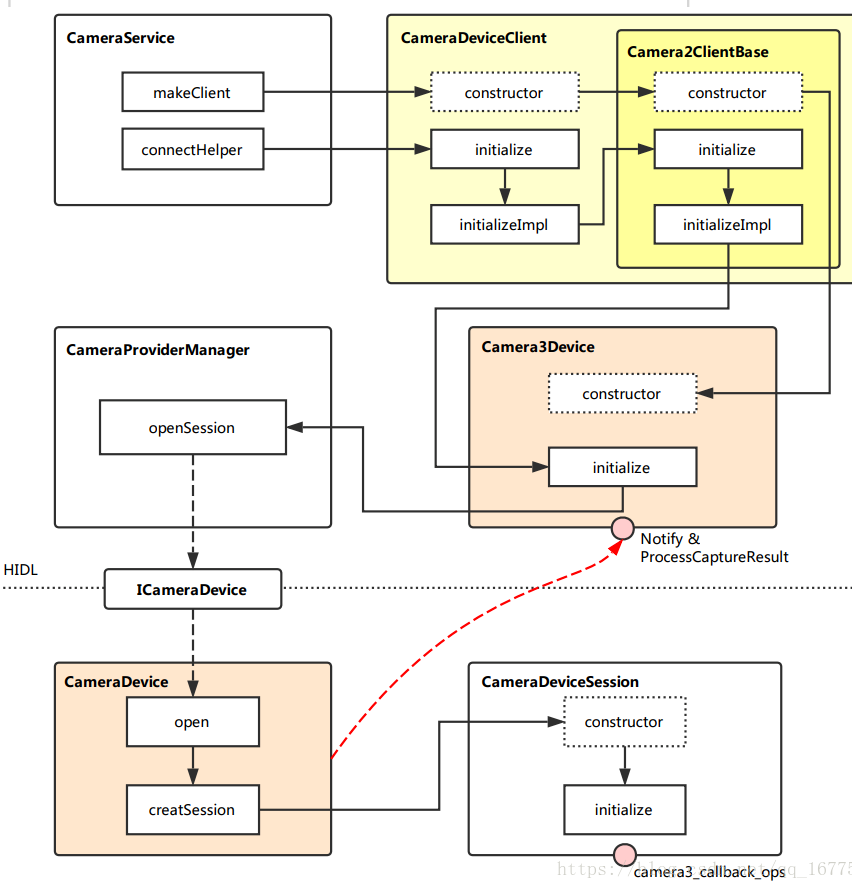
1.Camera HAL3 构建连路的过程,如下图(红色虚线是上行路线,黑色虚线则是下行路线):
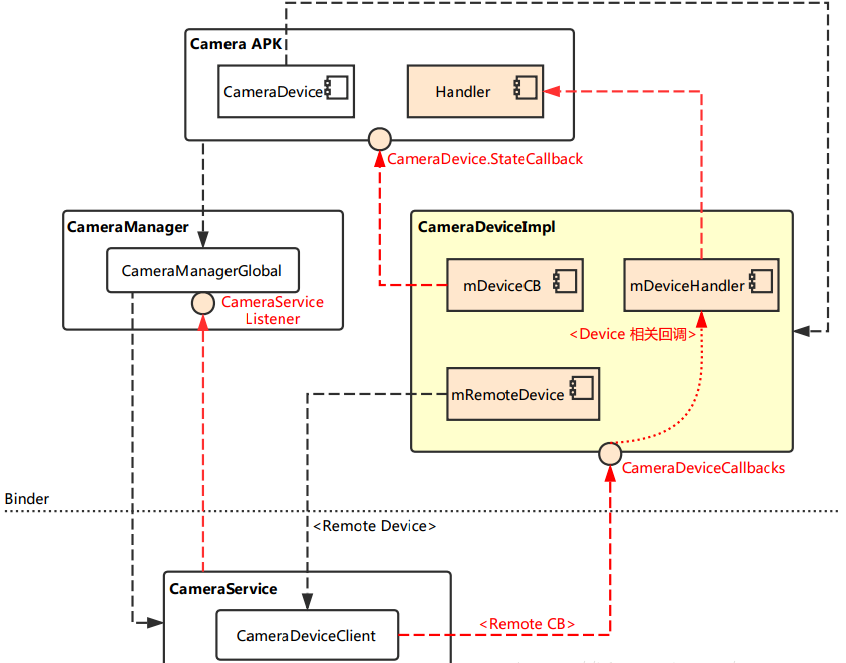
2.从 App 到 CameraService的调用流程
从 Application 连接到 CameraService,这涉及到 Android 架构中的三个层次:App 层,Framework 层,Runtime 层。其中,App 层直接调用 Framework 层所封装的方法,而 Framework 层需要通过 Binder 远程调用 Runtime 中 CameraService 的函数。
这一部分主要的函数调用逻辑如下图所示:

在 App 中,需要调用打开相机的API如下:
- CameraCharacteristics:描述摄像头的各种特性,我们可以通过CameraManager的getCameraCharacteristics(@NonNull String cameraId)方法来获取。
- CameraDevice:描述系统摄像头,类似于早期的Camera。
- CameraCaptureSession:Session类,当需要拍照、预览等功能时,需要先创建该类的实例,然后通过该实例里的方法进行控制(例如:拍照 capture())。
- CaptureRequest:描述了一次操作请求,拍照、预览等操作都需要先传入CaptureRequest参数,具体的参数控制也是通过CameraRequest的成员变量来设置。
- CaptureResult:描述拍照完成后的结果。
例如打开camera的java代码:
mCameraManager.openCamera(currentCameraId, stateCallback, backgroundHandler);
Camera2拍照流程如下所示:
(1)Framework CameraManager :/frameworks/base/core/java/android/hardware/camera2/CameraManager.java
最初的入口就是 CameraManager 的 openCamera 方法,但通过代码可以看到,它仅仅是调用了 openCameraForUid 方法。

@RequiresPermission(android.Manifest.permission.CAMERA)
public void openCamera(@NonNull String cameraId,@NonNull final CameraDevice.StateCallback callback, @Nullable Handler handler)throws CameraAccessException {openCameraForUid(cameraId, callback, handler, USE_CALLING_UID);
}
下面的代码忽略掉了一些参数检查相关操作,最终主要调用了 openCameraDeviceUserAsync 方法。
public void openCameraForUid(@NonNull String cameraId,@NonNull final CameraDevice.StateCallback callback, @Nullable Handler handler,int clientUid)throws CameraAccessException {/* Do something in*/....../* Do something out*/openCameraDeviceUserAsync(cameraId, callback, handler, clientUid);
}
参考如下注释分析:
private CameraDevice openCameraDeviceUserAsync(String cameraId,CameraDevice.StateCallback callback, Handler handler, final int uid)throws CameraAccessException {CameraCharacteristics characteristics = getCameraCharacteristics(cameraId);CameraDevice device = null;synchronized (mLock) {ICameraDeviceUser cameraUser = null;android.hardware.camera2.impl.CameraDeviceImpl deviceImpl = //实例化一个 CameraDeviceImpl。构造时传入了 CameraDevice.StateCallback 以及 Handler。new android.hardware.camera2.impl.CameraDeviceImpl( cameraId,callback,handler,characteristics,mContext.getApplicationInfo().targetSdkVersion);ICameraDeviceCallbacks callbacks = deviceImpl.getCallbacks(); //获取 CameraDeviceCallback 实例,这是提供给远端连接到 CameraDeviceImpl 的接口。try {if (supportsCamera2ApiLocked(cameraId)) { //HAL3 中走的是这一部分逻辑,主要是从 CameraManagerGlobal 中获取 CameraService 的本地接口,通过它远端调用(采用 Binder 机制) connectDevice 方法连接到相机设备。//注意返回的 cameraUser 实际上指向的是远端 CameraDeviceClient 的本地接口。// Use cameraservice's cameradeviceclient implementation for HAL3.2+ devicesICameraService cameraService = CameraManagerGlobal.get().getCameraService();if (cameraService == null) {throw new ServiceSpecificException(ICameraService.ERROR_DISCONNECTED,"Camera service is currently unavailable");}cameraUser = cameraService.connectDevice(callbacks, cameraId,mContext.getOpPackageName(), uid);} else {// Use legacy camera implementation for HAL1 devicesint id;try {id = Integer.parseInt(cameraId);} catch (NumberFormatException e) {throw new IllegalArgumentException("Expected cameraId to be numeric, but it was: "+ cameraId);}Log.i(TAG, "Using legacy camera HAL.");cameraUser = CameraDeviceUserShim.connectBinderShim(callbacks, id);}} catch (ServiceSpecificException e) {/* Do something in */....../* Do something out */}// TODO: factor out callback to be non-nested, then move setter to constructor// For now, calling setRemoteDevice will fire initial// onOpened/onUnconfigured callbacks.// This function call may post onDisconnected and throw CAMERA_DISCONNECTED if// cameraUser dies during setup.deviceImpl.setRemoteDevice(cameraUser); //将 CameraDeviceClient 设置到 CameraDeviceImpl 中进行管理。device = deviceImpl;}return device;
}
(2)CameraDeviceImpl : /frameworks/base/core/java/android/hardware/camera2/Impl/CameraDeviceImpl.java
在继续向下分析打开相机流程之前,先简单看看调用到的 CameraDeviceImpl 中的setRemoteDevice 方法,主要是将获取到的远端设备保存起来:
/*** Set remote device, which triggers initial onOpened/onUnconfigured callbacks** <p>This function may post onDisconnected and throw CAMERA_DISCONNECTED if remoteDevice dies* during setup.</p>**/
public void setRemoteDevice(ICameraDeviceUser remoteDevice) throws CameraAccessException {synchronized(mInterfaceLock) {// TODO: Move from decorator to direct binder-mediated exceptions// If setRemoteFailure already called, do nothingif (mInError) return;mRemoteDevice = new ICameraDeviceUserWrapper(remoteDevice); //通过 ICameraDeviceUserWrapper 给远端设备实例加上一层封装。IBinder remoteDeviceBinder = remoteDevice.asBinder(); //使用 Binder 机制的一些基本设置。// For legacy camera device, remoteDevice is in the same process, and// asBinder returns NULL.if (remoteDeviceBinder != null) {try {remoteDeviceBinder.linkToDeath(this, /*flag*/ 0); //如果这个binder消失,为标志信息注册一个接收器。} catch (RemoteException e) {CameraDeviceImpl.this.mDeviceHandler.post(mCallOnDisconnected);throw new CameraAccessException(CameraAccessException.CAMERA_DISCONNECTED,"The camera device has encountered a serious error");}}mDeviceHandler.post(mCallOnOpened); //需此处触发 onOpened 与 onUnconfigured 这两个回调,每个回调都是通过 mDeviceHandler 启用一个新线程来调用的。mDeviceHandler.post(mCallOnUnconfigured);}
}
(3)Runtime:通过 Binder 机制,我们远端调用了 connectDevice 方法(在 C++ 中称为函数,但说成方法可能更顺口一些),这个方法实现在 CameraService 类中。
(4)CameraService:/frameworks/av/services/camera/libcameraservice/CameraService.cpp
Status CameraService::connectDevice(const sp<hardware::camera2::ICameraDeviceCallbacks>& cameraCb,const String16& cameraId,const String16& clientPackageName,int clientUid,/*out*/sp<hardware::camera2::ICameraDeviceUser>* device) {ATRACE_CALL();Status ret = Status::ok();String8 id = String8(cameraId);sp<CameraDeviceClient> client = nullptr;//此处调用的 connectHelper 方法才真正实现了连接逻辑(HAL1 时最终也调用到这个方法)。需要注意的是,设定的模板类型是 ICameraDeviceCallbacks 以及 CameraDeviceClient。ret = connectHelper<hardware::camera2::ICameraDeviceCallbacks,CameraDeviceClient>(cameraCb, id,CAMERA_HAL_API_VERSION_UNSPECIFIED, clientPackageName,clientUid, USE_CALLING_PID, API_2,/*legacyMode*/ false, /*shimUpdateOnly*/ false,/*out*/client);if(!ret.isOk()) {logRejected(id, getCallingPid(), String8(clientPackageName),ret.toString8());return ret;}*device = client; //client 指向的类型是 CameraDeviceClient,其实例则是最终的返回结果。return ret;
}
connectHelper 内容较多,忽略掉我们还无需关注的地方分析:
template<class CALLBACK, class CLIENT>
Status CameraService::connectHelper(const sp<CALLBACK>& cameraCb, const String8& cameraId,int halVersion, const String16& clientPackageName, int clientUid, int clientPid,apiLevel effectiveApiLevel, bool legacyMode, bool shimUpdateOnly,/*out*/sp<CLIENT>& device) {binder::Status ret = binder::Status::ok();String8 clientName8(clientPackageName);/* Do something in */....../* Do something out */sp<BasicClient> tmp = nullptr;//调用 makeClient 生成 CameraDeviceClient 实例。if(!(ret = makeClient(this, cameraCb, clientPackageName, cameraId, facing, clientPid,clientUid, getpid(), legacyMode, halVersion, deviceVersion, effectiveApiLevel,/*out*/&tmp)).isOk()) {return ret;}//初始化 CLIENT 实例。注意此处的模板类型 CLIENT 即是 CameraDeviceClient,传入的参数 mCameraProviderManager 则是与 HAL service 有关。 client = static_cast<CLIENT*>(tmp.get());LOG_ALWAYS_FATAL_IF(client.get() == nullptr, "%s: CameraService in invalid state",__FUNCTION__);err = client->initialize(mCameraProviderManager);/* Do something in */....../* Do something out */// Important: release the mutex here so the client can call back into the service from its// destructor (can be at the end of the call)device = client;return ret;
}
makeClient 主要是根据 API 版本以及 HAL 版本来选择生成具体的 Client 实例,Client 就沿着前面分析下来的路径返回到 CameraDeviceImpl 实例中,被保存到 mRemoteDevice。
Status CameraService::makeClient(const sp<CameraService>& cameraService,const sp<IInterface>& cameraCb, const String16& packageName, const String8& cameraId,int facing, int clientPid, uid_t clientUid, int servicePid, bool legacyMode,int halVersion, int deviceVersion, apiLevel effectiveApiLevel,/*out*/sp<BasicClient>* client) {if (halVersion < 0 || halVersion == deviceVersion) {// Default path: HAL version is unspecified by caller, create CameraClient// based on device version reported by the HAL.switch(deviceVersion) {case CAMERA_DEVICE_API_VERSION_1_0:/* Do something in */....../* Do something out */case CAMERA_DEVICE_API_VERSION_3_0:case CAMERA_DEVICE_API_VERSION_3_1:case CAMERA_DEVICE_API_VERSION_3_2:case CAMERA_DEVICE_API_VERSION_3_3:case CAMERA_DEVICE_API_VERSION_3_4:if (effectiveApiLevel == API_1) { // Camera1 API routesp<ICameraClient> tmp = static_cast<ICameraClient*>(cameraCb.get());*client = new Camera2Client(cameraService, tmp, packageName, cameraIdToInt(cameraId),facing, clientPid, clientUid, servicePid, legacyMode);} else { // Camera2 API route : 实例化了 CameraDeviceClient 类作为 Client(注意此处构造传入了 ICameraDeviceCallbacks,这是连接到 CameraDeviceImpl 的远端回调)sp<hardware::camera2::ICameraDeviceCallbacks> tmp =static_cast<hardware::camera2::ICameraDeviceCallbacks*>(cameraCb.get());*client = new CameraDeviceClient(cameraService, tmp, packageName, cameraId,facing, clientPid, clientUid, servicePid);}break;default:// Should not be reachableALOGE("Unknown camera device HAL version: %d", deviceVersion);return STATUS_ERROR_FMT(ERROR_INVALID_OPERATION,"Camera device \"%s\" has unknown HAL version %d",cameraId.string(), deviceVersion);}} else {/* Do something in */....../* Do something out */}return Status::ok();
}
至此,打开相机流程中,从 App 到 CameraService 的调用逻辑基本上就算走完了。
简图总结:
Ps:
- CameraManagerGlobal 是真正的实现层,它与 JAVA 层的 CameraService 创建连接,从而创建相机的连路。
- CameraDeviceImpl 相当于运行上下文,它取代了 Android N 之前的 JNI 层。
3.从 CameraService 到 HAL Service
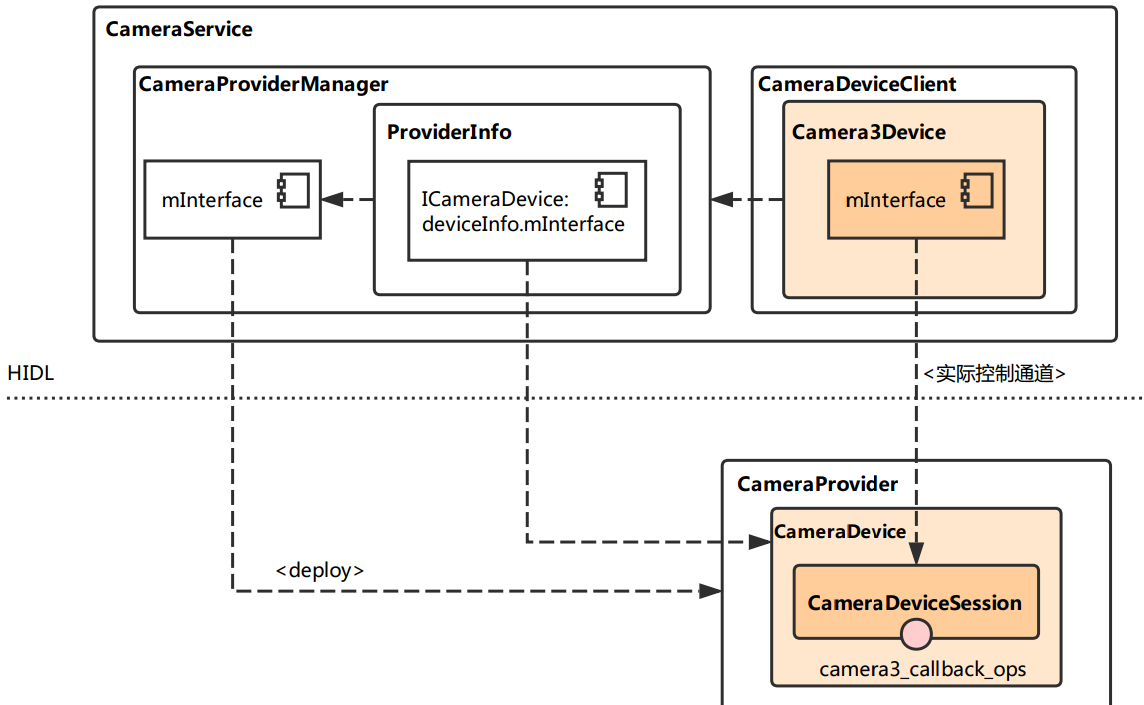
由于 Android O 中加入了 Treble 机制,CameraServer 一端主体为 CameraService,它将会寻找现存的 Provider service,将其加入到内部的 CameraProviderManager 中进行管理,相关操作都是通过远端调用进行的。
而 Provider service 一端的主体为 CameraProvider,它在初始化时就已经连接到 libhardware 的 Camera HAL 实现层,并以 CameraModule 来进行管理。
进程的启动后,连路的 “载体” 就搭建完成了(需要注意,此时 QCamera3HWI 还未创建),可用下图简单表示:

而在打开相机时,该层的完整连路会被创建出来,主要调用逻辑如下图:
上回讲到,在 CameraService::makeClient 中,实例化了一个 CameraDeviceClient。现在我们就从它的构造函数开始,继续探索打开相机的流程。
这一部分主要活动在 Runtime 层,这里分成 CameraService 与 HAL Service 两侧来分析。
(1)CameraDeviceClient :frameworks\av\services\camera\libcameraservice\api2\CameraDeviceClient.cpp
CameraDeviceClient::CameraDeviceClient(const sp<CameraService>& cameraService,const sp<hardware::camera2::ICameraDeviceCallbacks>& remoteCallback,const String16& clientPackageName,const String8& cameraId,int cameraFacing,int clientPid,uid_t clientUid,int servicePid) :Camera2ClientBase(cameraService, remoteCallback, clientPackageName,cameraId, cameraFacing, clientPid, clientUid, servicePid), //继承它的父类 Camera2ClientBase mInputStream(),mStreamingRequestId(REQUEST_ID_NONE),mRequestIdCounter(0),mPrivilegedClient(false) {char value[PROPERTY_VALUE_MAX];property_get("persist.camera.privapp.list", value, "");String16 packagelist(value);if (packagelist.contains(clientPackageName.string())) {mPrivilegedClient = true;}ATRACE_CALL();ALOGI("CameraDeviceClient %s: Opened", cameraId.string());
}
CameraService 在创建 CameraDeviceClient 之后,会调用它的初始化函数:
//对外提供调用的初始化函数接口 initialize。
status_t CameraDeviceClient::initialize(sp<CameraProviderManager> manager) {return initializeImpl(manager);
}//初始化的具体实现函数,模板 TProviderPtr 在此处即是 CameraProviderManager 类。
template<typename TProviderPtr>
//首先将父类初始化,注意此处传入了 CameraProviderManager。
status_t CameraDeviceClient::initializeImpl(TProviderPtr providerPtr) {ATRACE_CALL();status_t res;res = Camera2ClientBase::initialize(providerPtr);if (res != OK) {return res;}//这里是关于 FrameProcessor 的创建与初始化配置等等String8 threadName;mFrameProcessor = new FrameProcessorBase(mDevice);threadName = String8::format("CDU-%s-FrameProc", mCameraIdStr.string());mFrameProcessor->run(threadName.string());mFrameProcessor->registerListener(FRAME_PROCESSOR_LISTENER_MIN_ID,FRAME_PROCESSOR_LISTENER_MAX_ID,/*listener*/this,/*sendPartials*/true);return OK;
}
(2)Camera2ClientBase:frameworks\av\services\camera\libcameraservice\common\Camera2ClientBase.cpp
template <typename TClientBase> //模板 TClientBase,在 CameraDeviceClient 继承 Camera2ClientBase 时被指定为 CameraDeviceClientBase。
Camera2ClientBase<TClientBase>::Camera2ClientBase( //构造的相关参数,以及初始化列表,这里面需要注意 TCamCallbacks 在 CameraDeviceClientBase 中被指定为了 ICameraDeviceCallbacks。 const sp<CameraService>& cameraService,const sp<TCamCallbacks>& remoteCallback,const String16& clientPackageName,const String8& cameraId,int cameraFacing,int clientPid,uid_t clientUid,int servicePid):TClientBase(cameraService, remoteCallback, clientPackageName,cameraId, cameraFacing, clientPid, clientUid, servicePid),mSharedCameraCallbacks(remoteCallback),mDeviceVersion(cameraService->getDeviceVersion(TClientBase::mCameraIdStr)),mDeviceActive(false)
{ALOGI("Camera %s: Opened. Client: %s (PID %d, UID %d)", cameraId.string(),String8(clientPackageName).string(), clientPid, clientUid);mInitialClientPid = clientPid;mDevice = new Camera3Device(cameraId); //创建了一个 Camera3Device。LOG_ALWAYS_FATAL_IF(mDevice == 0, "Device should never be NULL here.");
}
回去再看看初始化函数:
template <typename TClientBase> //初始化函数接口,真正的实现部分在 initializeImpl 中。
status_t Camera2ClientBase<TClientBase>::initialize(sp<CameraProviderManager> manager) {return initializeImpl(manager);
}//TClientBase 对应 CameraDeviceClientBase,而 TProviderPtr 对应的是 CameraProviderManager。
template <typename TClientBase>
template <typename TProviderPtr>
status_t Camera2ClientBase<TClientBase>::initializeImpl(TProviderPtr providerPtr) {ATRACE_CALL();ALOGV("%s: Initializing client for camera %s", __FUNCTION__,TClientBase::mCameraIdStr.string());status_t res;// Verify ops permissionsres = TClientBase::startCameraOps(); //调用 CameraDeviceClientBase 的 startCameraOps 方法,检查 ops 的权限。if (res != OK) {return res;}if (mDevice == NULL) {ALOGE("%s: Camera %s: No device connected",__FUNCTION__, TClientBase::mCameraIdStr.string());return NO_INIT;}res = mDevice->initialize(providerPtr); //初始化 Camera3Device 的实例,注意此处传入了 CameraProviderManager。if (res != OK) {ALOGE("%s: Camera %s: unable to initialize device: %s (%d)",__FUNCTION__, TClientBase::mCameraIdStr.string(), strerror(-res), res);return res;}//在 Camera3Device 实例中设置 Notify 回调。wp<CameraDeviceBase::NotificationListener> weakThis(this);res = mDevice->setNotifyCallback(weakThis);return OK;
}
(3)Camera3Device:frameworks\av\services\camera\libcameraservice\device3\Camera3Device.cpp
Camera3Device::Camera3Device(const String8 &id):mId(id),mOperatingMode(NO_MODE),mIsConstrainedHighSpeedConfiguration(false),mStatus(STATUS_UNINITIALIZED),mStatusWaiters(0),mUsePartialResult(false),mNumPartialResults(1),mTimestampOffset(0),mNextResultFrameNumber(0),mNextReprocessResultFrameNumber(0),mNextShutterFrameNumber(0),mNextReprocessShutterFrameNumber(0),mListener(NULL),mVendorTagId(CAMERA_METADATA_INVALID_VENDOR_ID)
{ATRACE_CALL();//在这个观察构造函数中设定了两个回调接口:camera3_callback_ops::notify = &sNotify;camera3_callback_ops::process_capture_result = &sProcessCaptureResult;ALOGV("%s: Created device for camera %s", __FUNCTION__, mId.string());
}
其初始化函数篇幅较长,这里省略掉了关于 RequestMetadataQueue 的相关操作。
status_t Camera3Device::initialize(sp<CameraProviderManager> manager) {ATRACE_CALL();Mutex::Autolock il(mInterfaceLock);Mutex::Autolock l(mLock);ALOGV("%s: Initializing HIDL device for camera %s", __FUNCTION__, mId.string());if (mStatus != STATUS_UNINITIALIZED) {CLOGE("Already initialized!");return INVALID_OPERATION;}if (manager == nullptr) return INVALID_OPERATION;sp<ICameraDeviceSession> session;ATRACE_BEGIN("CameraHal::openSession");status_t res = manager->openSession(mId.string(), this, //调用CameraProviderManager的openSession方法,开启了远端的Session/*out*/ &session);ATRACE_END();if (res != OK) {SET_ERR_L("Could not open camera session: %s (%d)", strerror(-res), res);return res;}/* Do something in */....../* Do something out */return initializeCommonLocked();
}
(4)CameraProviderManager:frameworks\av\services\camera\libcameraservice\common\CameraProviderManager.cpp
status_t CameraProviderManager::openSession(const std::string &id,const sp<hardware::camera::device::V3_2::ICameraDeviceCallback>& callback,/*out*/sp<hardware::camera::device::V3_2::ICameraDeviceSession> *session) {std::lock_guard<std::mutex> lock(mInterfaceMutex);auto deviceInfo = findDeviceInfoLocked(id, //首先调用 findDeviceInfoLocked,获取 HAL3 相关的 DeviceInfo3/*minVersion*/ {3,0}, /*maxVersion*/ {4,0});if (deviceInfo == nullptr) return NAME_NOT_FOUND;auto *deviceInfo3 = static_cast<ProviderInfo::DeviceInfo3*>(deviceInfo);Status status;hardware::Return<void> ret;//通过远端调用 CameraDevice 的 open 方法,创建 CameraDeviceSession 实例并将其本地调用接口通过入参 session 返回。ret = deviceInfo3->mInterface->open(callback, [&status, &session](Status s, const sp<device::V3_2::ICameraDeviceSession>& cameraSession) {status = s;if (status == Status::OK) {*session = cameraSession;}});if (!ret.isOk()) {ALOGE("%s: Transaction error opening a session for camera device %s: %s",__FUNCTION__, id.c_str(), ret.description().c_str());return DEAD_OBJECT;}return mapToStatusT(status);
}
(5)CameraDevice:hardware\interfaces\camera\device\3.2\default\CameraDevice.cpp
CameraDevice 的实例实际上在初始化 HAL Service 之后就存在了。 前面说到,通过 CameraProviderManager 中的 deviceInfo 接口,调用远端 CameraDevice 实例的 open 方法,下面就来看看它的代码实现:
Return<void> CameraDevice::open(const sp<ICameraDeviceCallback>& callback, open_cb _hidl_cb) {Status status = initStatus();sp<CameraDeviceSession> session = nullptr;if (callback == nullptr) {ALOGE("%s: cannot open camera %s. callback is null!",__FUNCTION__, mCameraId.c_str());_hidl_cb(Status::ILLEGAL_ARGUMENT, nullptr);return Void();}if (status != Status::OK) {/* Do something in */....../* Do something out */} else {mLock.lock();/* Do something in */....../* Do something out *//** Open HAL device */status_t res;camera3_device_t *device;ATRACE_BEGIN("camera3->open");res = mModule->open(mCameraId.c_str(), //注意 mModule 是在 HAL Service 初始化时就已经配置好的,它对从libhardware库中加载的 Camera HAL 接口进行了一层封装,从这里往下就会一路走到 QCamera3HWI 的构造流程去。reinterpret_cast<hw_device_t**>(&device));ATRACE_END();/* Do something in */....../* Do something out *///创建 session 并让内部成员 mSession 持有,具体实现的函数为 creatSession。session = createSession(device, info.static_camera_characteristics, callback);/* Do something in */....../* Do something out */mSession = session;IF_ALOGV() {session->getInterface()->interfaceChain([](::android::hardware::hidl_vec<::android::hardware::hidl_string> interfaceChain) {ALOGV("Session interface chain:");for (auto iface : interfaceChain) {ALOGV(" %s", iface.c_str());}});}mLock.unlock();}_hidl_cb(status, session->getInterface());return Void();
}
而 creatSession 中直接创建了一个 CameraDeviceSession。当然在其构造函数中会调用内部的初始化函数,然后会进入 HAL 接口层 QCamera3HWI 的初始化流程,至此,从 CameraService 到 HAL Service 这一部分的打开相机流程就基本走通了。
简图总结:
4.从 HAL Service 到 Camera HAL
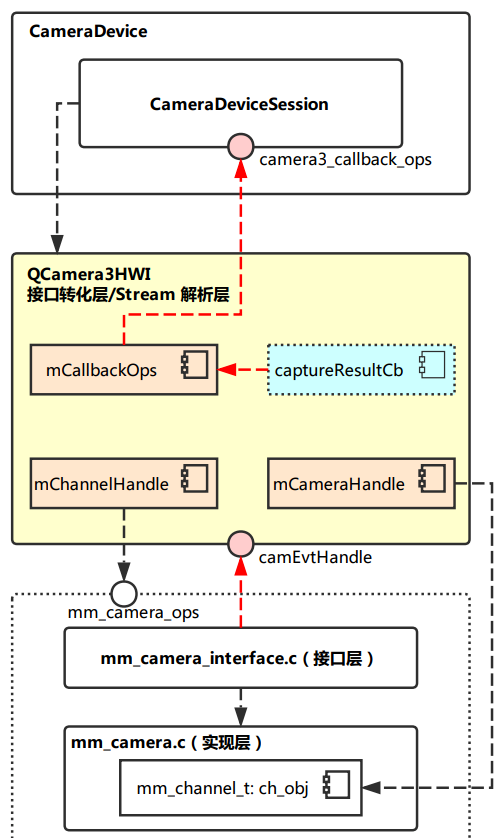
在 HAL3 中,Camera HAL 的接口转化层(以及流解析层)由 QCamera3HardwareInterface 担当,而接口层与实现层与 HAL1 中基本没什么差别,都是在 mm_camera_interface.c 与 mm_camera.c 中。
那么接口转化层的实例是何时创建的,又是怎么初始化的,创建它的时候,与接口层、实现层又有什么交互?通过下图展示的主要调用流程:

(1)CameraModule(HAL Servic) : hardware\interfaces\camera\common\1.0\default\CameraModule.cpp
上回说到,CameraDevice::open 的实现中,调用了 mModule->open,即 CameraModule::open,通过代码来看,它做的事并不多,主要是调用 mModule->common.methods->open,来进入下一层级的流程。
而这里则需要注意了,open 是一个函数指针,它指向的是 QCamera2Factory 的 camera_device_open 方法,至于为什么和 QCamera2Factory 有关,这就要回头看 HAL Service 的启动初始化流程了。
int CameraModule::open(const char* id, struct hw_device_t** device) {int res;ATRACE_BEGIN("camera_module->open");res = filterOpenErrorCode(mModule->common.methods->open(&mModule->common, id, device));ATRACE_END();return res;
}
(2)QCamera2Factory(Camera HAL):hardware\qcom\camera\qcamera2\QCamera2Factory.cpp
/*===========================================================================* FUNCTION : camera_device_open** DESCRIPTION: static function to open a camera device by its ID** PARAMETERS :* @camera_id : camera ID* @hw_device : ptr to struct storing camera hardware device info** RETURN : int32_t type of status* NO_ERROR -- success* none-zero failure code*==========================================================================*/
int QCamera2Factory::camera_device_open(const struct hw_module_t *module, const char *id,struct hw_device_t **hw_device)
{/* Do something in */....../* Do something out */#ifdef QCAMERA_HAL1_SUPPORT //注意到这里通过宏定义添加了对 HAL1 的兼容操作。实际上是要调用 cameraDeviceOpen 来进行下一步操作。if(gQCameraMuxer)rc = gQCameraMuxer->camera_device_open(module, id, hw_device);else
#endifrc = gQCamera2Factory->cameraDeviceOpen(atoi(id), hw_device);return rc;
}struct hw_module_methods_t QCamera2Factory::mModuleMethods = {.open = QCamera2Factory::camera_device_open, //这里就将前面所说的 open 函数指针指定为了 camera_device_open 这个方法。
};
cameraDeviceOpen 的工作:
/*===========================================================================* FUNCTION : cameraDeviceOpen** DESCRIPTION: open a camera device with its ID** PARAMETERS :* @camera_id : camera ID* @hw_device : ptr to struct storing camera hardware device info** RETURN : int32_t type of status* NO_ERROR -- success* none-zero failure code*==========================================================================*/
int QCamera2Factory::cameraDeviceOpen(int camera_id,struct hw_device_t **hw_device)
{/* Do something in */....../* Do something out */if ( mHalDescriptors[camera_id].device_version == CAMERA_DEVICE_API_VERSION_3_0 ) {QCamera3HardwareInterface *hw = new QCamera3HardwareInterface(mHalDescriptors[camera_id].cameraId, //首先创建了 QCamera3HardwareInterface 的实例。mCallbacks);if (!hw) {LOGE("Allocation of hardware interface failed");return NO_MEMORY;}rc = hw->openCamera(hw_device); //调用实例的 openCamera 方法。if (rc != 0) {delete hw;}}/* Do something in */....../* Do something out */return rc;
}
(3)QCamera3HardwareInterface : hardware\qcom\camera\qcamera2\hal3\QCamera3HWI.cpp
首先需要注意的是内部成员 mCameraOps 的定义。 在构造实例时,有 mCameraDevice.ops = &mCameraOps;(关键点)
camera3_device_ops_t QCamera3HardwareInterface::mCameraOps = {.initialize = QCamera3HardwareInterface::initialize,.configure_streams = QCamera3HardwareInterface::configure_streams,.register_stream_buffers = NULL,.construct_default_request_settings = QCamera3HardwareInterface::construct_default_request_settings,.process_capture_request = QCamera3HardwareInterface::process_capture_request,.get_metadata_vendor_tag_ops = NULL,.dump = QCamera3HardwareInterface::dump,.flush = QCamera3HardwareInterface::flush,.reserved = {0},
};
再来继续看看 openCamera 实现:
int QCamera3HardwareInterface::openCamera(struct hw_device_t **hw_device)
{/* Do something in */....../* Do something out */rc = openCamera(); //调用另一个 openCamera 方法,这是具体实现的部分。if (rc == 0) {*hw_device = &mCameraDevice.common; //打开相机成功后,将设备结构中的 common 部分通过双重指针 hw_device 返回。} else*hw_device = NULL;/* Do something in */....../* Do something out */return rc;
}int QCamera3HardwareInterface::openCamera()
{/* Do something in */....../* Do something out */rc = camera_open((uint8_t)mCameraId, &mCameraHandle); //这里就开始进入接口层了,调用的是接口层中的 camera_open 接口。注意此处获取到了 mCameraHandle./* Do something in */....../* Do something out */rc = mCameraHandle->ops->register_event_notify(mCameraHandle->camera_handle, //注意这里传入了一个 camEvtHandlecamEvtHandle, (void *)this);/* Do something in */....../* Do something out */ rc = mCameraHandle->ops->get_session_id(mCameraHandle->camera_handle, &sessionId[mCameraId]);/* Do something in */....../* Do something out */return NO_ERROR;
}
上面是接口转化层中,关于 openCamera 的部分,下面继续看看它的初始化函数。 在前面已经分析过,创建 CameraDeviceSession 实例时,会调用它内部的初始化方法,而这其中包含了调用 QCamera3HWI 的初始化方法 initialize
int QCamera3HardwareInterface::initialize(const struct camera3_device *device,const camera3_callback_ops_t *callback_ops)
{LOGD("E");QCamera3HardwareInterface *hw =reinterpret_cast<QCamera3HardwareInterface *>(device->priv);if (!hw) {LOGE("NULL camera device");return -ENODEV;}int rc = hw->initialize(callback_ops); //调用了真正实现的初始化逻辑的函数LOGD("X");return rc;
}int QCamera3HardwareInterface::initialize(const struct camera3_callback_ops *callback_ops)
{ATRACE_CALL();int rc;LOGI("E :mCameraId = %d mState = %d", mCameraId, mState);pthread_mutex_lock(&mMutex);// Validate current stateswitch (mState) {case OPENED:/* valid state */break;default:LOGE("Invalid state %d", mState);rc = -ENODEV;goto err1;}rc = initParameters(); //参数(mParameters)初始化,注意这里的参数和 CameraParameter 是不同的,它是 metadata_buffer 相关参数的结构。if (rc < 0) {LOGE("initParamters failed %d", rc);goto err1;}mCallbackOps = callback_ops; //这里将 camera3_call_back_ops 与 mCallbackOps 关联了起来。mChannelHandle = mCameraHandle->ops->add_channel( //获取 mChannelHandle 这一句柄,调用的方法实际是 mm_camera_interface.c 中的 mm_camera_intf_add_channel。mCameraHandle->camera_handle, NULL, NULL, this);if (mChannelHandle == 0) {LOGE("add_channel failed");rc = -ENOMEM;pthread_mutex_unlock(&mMutex);return rc;}pthread_mutex_unlock(&mMutex);mCameraInitialized = true;mState = INITIALIZED;LOGI("X");return 0;err1:pthread_mutex_unlock(&mMutex);return rc;
}
(4)mm_camera_interface.c(接口层) :hardware\qcom\camera\qcamera2\stack\mm-camera-interface\src\mm_camera_interface.c
camera_open 中干的事也不多,省略掉了关于为 cam_obj 分配内存以及初始化的部分。实际上是调用实现层中的 mm_camera_open 来真正实现打开相机设备的操作,设备的各种信息都填充到 cam_obj 结构中。
int32_t camera_open(uint8_t camera_idx, mm_camera_vtbl_t **camera_vtbl)
{int32_t rc = 0;mm_camera_obj_t *cam_obj = NULL;/* Do something in */....../* Do something out */rc = mm_camera_open(cam_obj);/* Do something in */....../* Do something out */
}
而关于初始化时调用的 mm_camera_intf_add_channel 代码如下:
static uint32_t mm_camera_intf_add_channel(uint32_t camera_handle,mm_camera_channel_attr_t *attr,mm_camera_buf_notify_t channel_cb,void *userdata)
{uint32_t ch_id = 0;mm_camera_obj_t * my_obj = NULL;LOGD("E camera_handler = %d", camera_handle);pthread_mutex_lock(&g_intf_lock);my_obj = mm_camera_util_get_camera_by_handler(camera_handle);if(my_obj) {pthread_mutex_lock(&my_obj->cam_lock);pthread_mutex_unlock(&g_intf_lock);ch_id = mm_camera_add_channel(my_obj, attr, channel_cb, userdata); //通过调用实现层的 mm_camera_add_channel 来获取一个 channel id,也就是其句柄。} else {pthread_mutex_unlock(&g_intf_lock);}LOGD("X ch_id = %d", ch_id);return ch_id;
}
(5)mm_camera.c(实现层) :hardware\qcom\camera\qcamera2\stack\mm-camera-interface\src\mm_camera.c
终于来到最底层的实现了,mm_camera_open 主要工作是填充 my_obj,并且启动、初始化一些线程相关的东西,关于线程的部分我这里就省略掉了。
int32_t mm_camera_open(mm_camera_obj_t *my_obj)
{char dev_name[MM_CAMERA_DEV_NAME_LEN];int32_t rc = 0;int8_t n_try=MM_CAMERA_DEV_OPEN_TRIES;uint8_t sleep_msec=MM_CAMERA_DEV_OPEN_RETRY_SLEEP;int cam_idx = 0;const char *dev_name_value = NULL;int l_errno = 0;pthread_condattr_t cond_attr;LOGD("begin\n");if (NULL == my_obj) {goto on_error;}dev_name_value = mm_camera_util_get_dev_name(my_obj->my_hdl); //此处调用的函数是为了获取 my_obj 的句柄,这里不深入分析。if (NULL == dev_name_value) {goto on_error;}snprintf(dev_name, sizeof(dev_name), "/dev/%s",dev_name_value);sscanf(dev_name, "/dev/video%d", &cam_idx);LOGD("dev name = %s, cam_idx = %d", dev_name, cam_idx);do{n_try--;errno = 0;my_obj->ctrl_fd = open(dev_name, O_RDWR | O_NONBLOCK); //读取设备文件的文件描述符,存到 my_obj->ctrl_fd 中。l_errno = errno;LOGD("ctrl_fd = %d, errno == %d", my_obj->ctrl_fd, l_errno);if((my_obj->ctrl_fd >= 0) || (errno != EIO && errno != ETIMEDOUT) || (n_try <= 0 )) {break;}LOGE("Failed with %s error, retrying after %d milli-seconds",strerror(errno), sleep_msec);usleep(sleep_msec * 1000U);}while (n_try > 0);if (my_obj->ctrl_fd < 0) {LOGE("cannot open control fd of '%s' (%s)\n",dev_name, strerror(l_errno));if (l_errno == EBUSY)rc = -EUSERS;elserc = -1;goto on_error;} else {mm_camera_get_session_id(my_obj, &my_obj->sessionid); //成功获取到文件描述符后,就要获取 session 的 id 了。LOGH("Camera Opened id = %d sessionid = %d", cam_idx, my_obj->sessionid);}/* Do something in */....../* Do something out *//* unlock cam_lock, we need release global intf_lock in camera_open(),* in order not block operation of other Camera in dual camera use case.*/pthread_mutex_unlock(&my_obj->cam_lock);return rc;
}
初始化的相关部分,mm_camera_add_channel 代码如下:
uint32_t mm_camera_add_channel(mm_camera_obj_t *my_obj,mm_camera_channel_attr_t *attr,mm_camera_buf_notify_t channel_cb,void *userdata)
{mm_channel_t *ch_obj = NULL;uint8_t ch_idx = 0;uint32_t ch_hdl = 0;//从现有的 Channel 中找到第一个状态为 NOTUSED 的,获取到 ch_obj 中for(ch_idx = 0; ch_idx < MM_CAMERA_CHANNEL_MAX; ch_idx++) {if (MM_CHANNEL_STATE_NOTUSED == my_obj->ch[ch_idx].state) {ch_obj = &my_obj->ch[ch_idx];break;}}/*初始化 ch_obj 结构。首先调用 mm_camera_util_generate_handler 为其生成一个句柄(也是该函数的返回值),*然后将状态设置为 STOPPED,注意这里还保存了 my_obj 的指针及其 session id,最后调用 mm_channel_init 完成了 Channel 的初始化。*/if (NULL != ch_obj) {/* initialize channel obj */memset(ch_obj, 0, sizeof(mm_channel_t));ch_hdl = mm_camera_util_generate_handler(ch_idx);ch_obj->my_hdl = ch_hdl;ch_obj->state = MM_CHANNEL_STATE_STOPPED;ch_obj->cam_obj = my_obj;pthread_mutex_init(&ch_obj->ch_lock, NULL);ch_obj->sessionid = my_obj->sessionid;mm_channel_init(ch_obj, attr, channel_cb, userdata);}pthread_mutex_unlock(&my_obj->cam_lock);return ch_hdl;
}
简图总结:
总而言之,上面这一顿操作下来后,相机从上到下的整个连路就已经打通,接下来应该只要 APP 按照流程下发 Preview 的 Request 就可以开始获取预览数据了。
三、核心概念:Request
request是贯穿camera2数据处理流程最为重要的概念,应用框架是通过向camera子系统发送request来获取其想要的result。
request有下述几个重要特征:
- 一个request可以对应一系列的result。
- request应当包含所有必要的配置信息,存放于metadata中。如:分辨率和像素格式;sensor、镜头、闪光等的控制信息;3A 操作模式;RAW 到 YUV 处理控件;以及统计信息的生成等。
- request需要携带对应的surface(也就是框架里面的stream),用于接收返回的图像。
- 多个request可以同时处于in-flight状态,并且submit request是non-blocking方式的。也就是说,上一个request没有处理完,也可以submit新的request。
- 队列中request的处理总是按照FIFO的形式。
- snapshot的request比preview的request拥有更高的优先级。
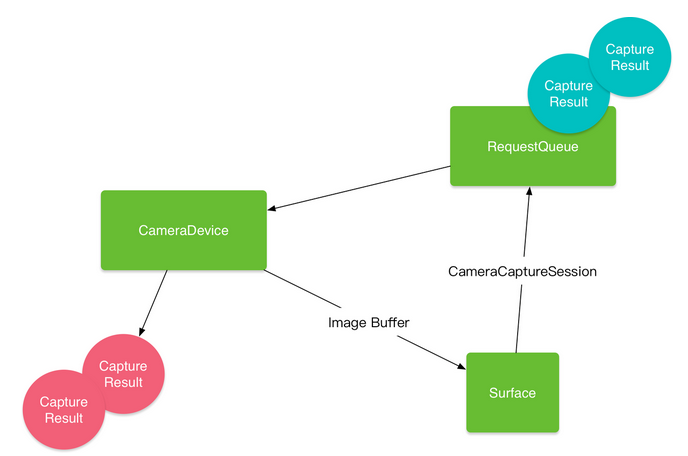
1.request的整体处理流程如下图:
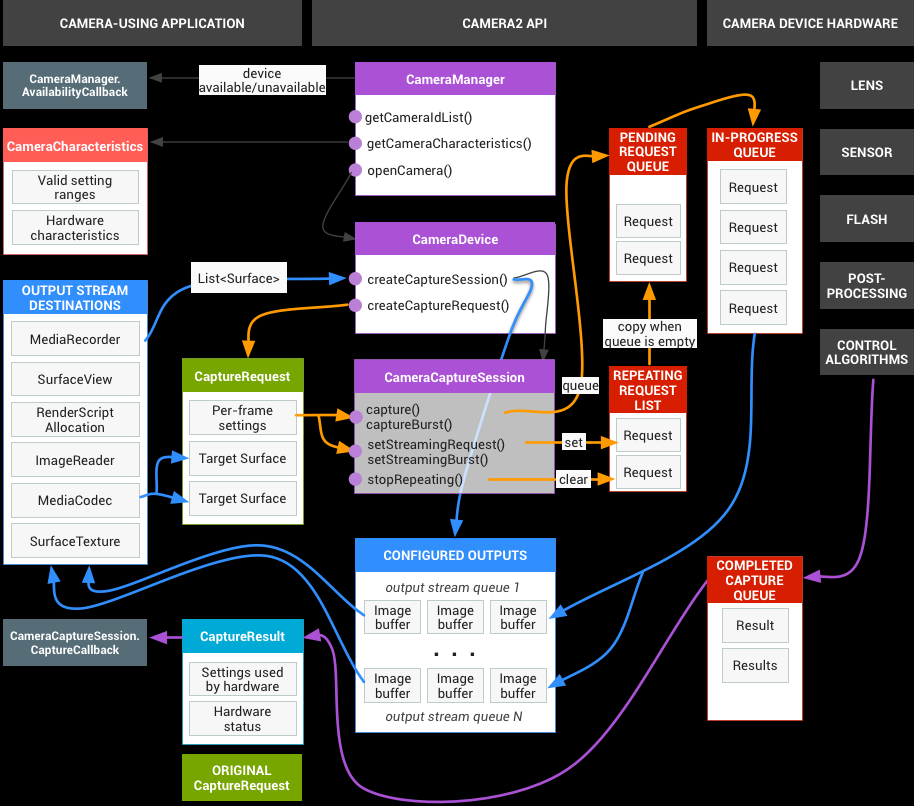
open 流程(黑色箭头线条)CameraManager注册AvailabilityCallback回调,用于接收相机设备的可用性状态变更的通知。CameraManager通过调用getCameraIdList()获取到当前可用的camera id,通过getCameraCharacteristcs()函数获取到指定相机设备的特性。CameraManager调用openCamera()打开指定相机设备,并返回一个CameraDevice对象,后续通过该CameraDevice对象操控具体的相机设备。使用CameraDevice对象的createCaptureSession()创建一个session,数据请求(预览、拍照等)都是通过session进行。在创建session时,需要提供Surface作为参数,用于接收返回的图像。configure stream流程(蓝色箭头线条)申请Surface,如上图的OUTPUT STREAMS DESTINATIONS框,用于在创建session时作为参数,接收session返回的图像。创建session后,surface会被配置成框架的stream。在框架中,stream定义了图像的size及format。每个request都需要携带target surface用于指定返回的图像是归属到哪个被configure的stream的。request处理流程(橙色箭头线条)CameraDevice对象通过createCaptureRequest()来创建request,每个reqeust都需要有surface和settings(settings就是metadata,request包含的所有配置信息都是放在metadata中的)。使用session的capture()、captureBurst()、setStreamingRequest()、setStreamingBurst()等api可以将request发送到框架。预览的request,通过setStreamingRequest()、setStreamingBurst()发送,仅调用一次。将request set到repeating request list里面。只要pending request queue里面没有request,就将repeating list里面的request copy到pending queue里面。拍照的request,通过capture()、captureBurst()发送,每次需要拍照都会调用。每次触发,都会直接将request入到pending request queue里面,所以拍照的request比预览的request的优先级更高。in-progress queue代表当前正在处理的request的queue,每处理完一个,都会从pending queue里面拿出来一个新的request放到这里。数据返回流程(紫色箭头线条)硬件层面返回的数据会放到result里面返回,会通过session的capture callback回调响应。
2.request在HAL的处理方式
(1)framework发送异步的request到hal。
(2)hal必须顺序处理request,对于每一个request都要返回timestamp(shutter,也就是帧的生成时间)、metadata、image buffers。
(3)对于request引用的每一类steam,必须按FIFO的方式返回result。比如:对于预览的stream,result id 9必须要先于result id 10返回。但是拍照的stream,当前可以只返回到result id 7,因为拍照和预览用的stream不一样。
(4)hal需要的信息都通过request携带的metadata接收,hal需要返回的信息都通过result携带的metadata返回。
HAL处理request的整体流程如下图。
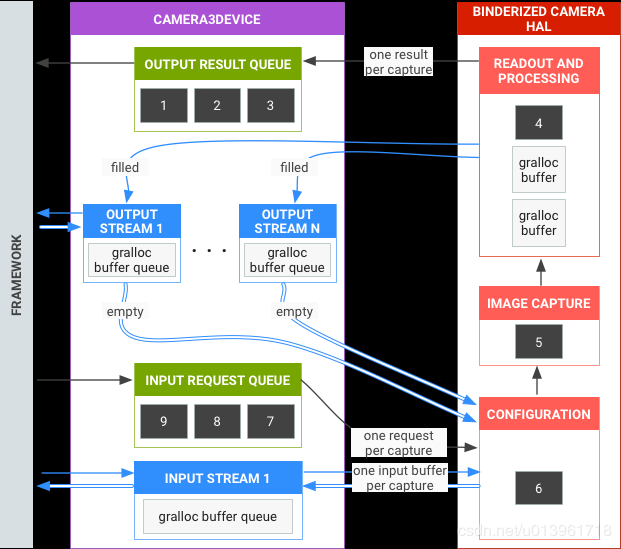
request处理流程(黑色箭头线条)framework异步地submit request到hal,hal依次处理,并返回result。每个被submit到hal的request都必须携带stream。stream分为input stream和output stream:input stream对应的buffer是已有图像数据的buffer,hal对这些buffer进行reprocess;output stream对应的buffer是empty buffer,hal将生成的图像数据填充的这些buffer里面。input stream处理流程(图像的INPUT STREAM 1)request携带input stream及input buffer到hal。hal进行reprocess,然后新的图像数据重新填充到buffer里面,返回到framework。output stream处理流程(图像的OUTPUT STREAM 1…N)request携带output stream及output buffer到hal。hal经过一系列模块的的处理,将图像数据写到buffer中,返回到frameowork。
-end-