目录
- 前言
- 什么是k-means?
- 什么是bpr?
- 什么是白化操作whiten?
- 0、导入需要的包
- 1、check_anchor_order
- 2、check_anchors
- 3、kmean_anchors
- 总结
- Reference
前言
源码: YOLOv5源码.
导航: 【YOLOV5-5.x 源码讲解】整体项目文件导航.
注释版全部项目文件已上传至GitHub: yolov5-5.x-annotations.
这个文件是通过 k-means 聚类 + 遗传算法来生成和当前数据集匹配度更高的anchors。如果要使用这个脚本要注意两点:
-
train.py的parse_opt下的参数noautoanchor必须为False

-
hyp.scratch.yaml下的anchors参数必须注释掉

什么是k-means?
\qquadk-means是非常经典且有效的聚类方法,通过计算样本之间的距离(相似程度)将较近的样本聚为同一类别(簇)。
使用k-means时主要关注两点
- 如何表示样本与样本之间的距离(核心问题),这个一般需要根据具体场景去设计,不同的方法聚类效果也不同,最常见的就是欧式距离,在目标检测领域常见的是IOU。
- 分为几类,这个也是需要根据应用场景取选择的,也是一个超参数。
k-means算法主要流程
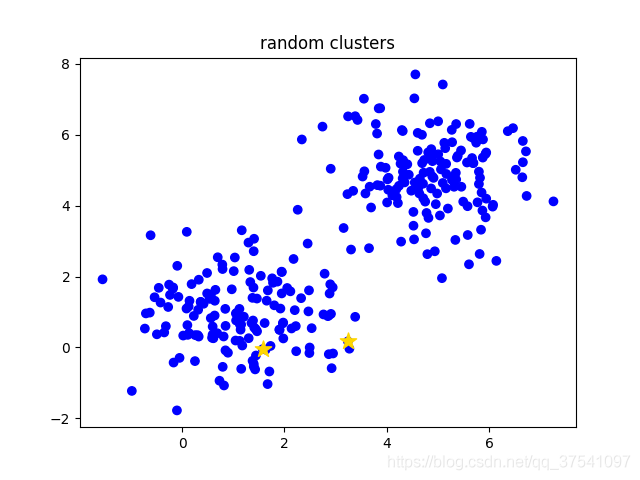
- 手动设定簇的个数k,假设k=2;
- 在所有样本中随机选取k个样本作为簇的初始中心,如下图(random clusters)中两个黄色的小星星代表随机初始化的两个簇中心;
- 计算每个样本离每个簇中心的距离(这里以欧式距离为例),然后将样本划分到离它最近的簇中。如下图(step 0)用不同的颜色区分不同的簇;
- 更新簇的中心,计算每个簇中所有样本的均值(方法不唯一)作为新的簇中心。如下图(step 1)所示,两个黄色的小星星已经移动到对应簇的中心;
- 重复第3步到第4步直到簇中心不在变化或者簇中心变化很小满足给定终止条件。如下图(step2)所示,最终聚类结果。



什么是bpr?
BPR(bpr best possible recall来源于论文: FCOS.
原论文解释:
BPR is defined as the ratio of the number of ground-truth boxes a detector can recall at the most divided by all ground-truth boxes. A ground-truth box is considered being recalled if the box is assigned to at least one sample (i.e., a location in FCOS or an anchor box in anchor-based detectors) during training.
\qquadbpr(best possible recall): 最多能被召回的gt框数量 / 所有gt框数量 最大值为1 越大越好 小于0.98就需要使用k-means + 遗传进化算法选择出与数据集更匹配的anchors框。
什么是白化操作whiten?
\qquad 白化的目的是去除输入数据的冗余信息。假设训练数据是图像,由于图像中相邻像素之间具有很强的相关性,所以用于训练时输入是冗余的;白化的目的就是降低输入的冗余性。
输入数据集X,经过白化处理后,新的数据X’满足两个性质:
- 特征之间相关性较低;
- 所有特征具有相同的方差=1
\qquad常见的作法是:对每一个数据做一个标准差归一化处理(除以标准差)。scipy.cluster.vq.kmeans() 函数输入的数据就是必须是白化后的数据。相应的输出的anchor k也是白化后的anchor,所以需要将anchor k 都乘以标准差恢复。
0、导入需要的包
import numpy as np # numpy矩阵操作模块
import matplotlib.pyplot as plt # matplotlib画图模块
import torch # PyTorch深度学习模块
import yaml # 操作yaml文件模块
from tqdm import tqdm # Python进度条模块from utils.general import colorstr
from utils.metrics import wh_iou
1、check_anchor_order
\qquad这个函数用于确认当前anchors和stride的顺序是否是一直的,因为我们的m.anchors是相对各个feature map(每个feature map的感受野不同 检测的目标大小也不同 适合的anchor大小也不同)所以必须要顺序一致 否则效果会很不好。这个函数一般用于check_anchors最后阶段。
def check_anchor_order(m):"""用在check_anchors最后 确定anchors和stride的顺序是一致的Check anchor order against stride order for YOLOv5 Detect() module m, and correct if necessary:params m: model中的最后一层 Detect层"""# 计算anchor的面积 anchor area [9]# tensor([134.4, 576.3, 1302.2, 5027.15, 12354.6, 25296.5e, 77122.3, 161472, 245507])a = m.anchor_grid.prod(-1).view(-1)# 计算最大anchor与最小anchor面积差da = a[-1] - a[0] # delta a tensor(245372.65625)# 计算最大stride与最小stride差ds = m.stride[-1] - m.stride[0] # delta s tensor(24.)# torch.sign(x):当x大于/小于0时,返回1/-1# 如果这里anchor与stride顺序不一致,则重新调整顺序if da.sign() != ds.sign(): # same orderprint('Reversing anchor order')m.anchors[:] = m.anchors.flip(0)m.anchor_grid[:] = m.anchor_grid.flip(0)
2、check_anchors
\qquad这个函数是通过计算bpr确定是否需要改变anchors 需要就调用k-means重新计算anchors。
def check_anchors(dataset, model, thr=4.0, imgsz=640):"""用于train.py中通过bpr确定是否需要改变anchors 需要就调用k-means重新计算anchorsCheck anchor fit to data, recompute if necessary:params dataset: 自定义数据集LoadImagesAndLabels返回的数据集:params model: 初始化的模型:params thr: 超参中得到 界定anchor与label匹配程度的阈值:params imgsz: 图片尺寸 默认640"""# 一些可视化: autoanchor: Analyzing anchors...prefix = colorstr('autoanchor: ')print(f'\n{
prefix}Origin anchors... ')# m: 从model中取出最后一层(Detect)m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()# dataset.shapes.max(1, keepdims=True) = 每张图片的较长边# shapes: 将数据集图片的最长边缩放到img_size, 较小边相应缩放 得到新的所有数据集图片的宽高 [N, 2]shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)# 产生随机数scale [2501, 1]scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale# [6301, 2] 所有target(6301个)的wh 基于原图大小 shapes * scale: 随机化尺度变化wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # whdef metric(k):"""用在check_anchors函数中 compute metric根据数据集的所有图片的wh和当前所有anchors k计算 bpr(best possible recall) 和 aat(anchors above threshold):params k: anchors [9, 2] wh: [N, 2]:return bpr: best possible recall 最多能被召回(通过thr)的gt框数量 / 所有gt框数量 小于0.98 才会用k-means计算anchor:return aat: anchors above threshold 每个target平均有多少个anchors"""# None添加维度 所有target(gt)的wh wh[:, None] [6301, 2]->[6301, 1, 2]# 所有anchor的wh k[None] [9, 2]->[1, 9, 2]# r: target的高h宽w与anchor的高h_a宽w_a的比值,即h/h_a, w/w_a [6301, 9, 2] 有可能大于1,也可能小于等于1r = wh[:, None] / k[None]# x 高宽比和宽高比的最小值 无论r大于1,还是小于等于1最后统一结果都要小于1 [6301, 9]x = torch.min(r, 1. / r).min(2)[0]# best [6301] 为每个gt框选择匹配所有anchors宽高比例值最好的那一个比值best = x.max(1)[0]# aat(anchors above threshold) 每个target平均有多少个anchorsaat = (x > 1. / thr).float().sum(1).mean() # 当axis=1时,求的是每一行元素的和# bpr(best possible recall) = 最多能被召回(通过thr)的gt框数量 / 所有gt框数量 小于0.98 才会用k-means计算anchorbpr = (best > 1. / thr).float().mean()fitness = (best * (best > 1. / thr).float()).mean()return bpr, aat, fitness# anchors: [N,2] 所有anchors的宽高 基于缩放后的图片大小(较长边为640 较小边相应缩放)anchors = m.anchor_grid.clone().cpu().view(-1, 2) # current anchors# 计算出数据集所有图片的wh和当前所有anchors的bpr和aat# bpr: bpr(best possible recall): 最多能被召回(通过thr)的gt框数量 / 所有gt框数量 [1] 0.96223 小于0.98 才会用k-means计算anchor# aat(anchors past thr): [1] 3.54360 通过阈值的anchor个数bpr, aat, fitness = metric(anchors)print(f"aat: {
aat:.5f}, fitness: {
fitness:.5f}, best possible recall: {
bpr:.5f}")print(" ".join([f"[{
int(i[0])}, {
int(i[1])}]" for i in anchors]))# threshold to recompute# 考虑这9类anchor的宽高和gt框的宽高之间的差距, 如果bpr<0.98(说明当前anchor不能很好的匹配数据集gt框)就会根据k-means算法重新聚类新的anchorif bpr < 0.98:print('. Attempting to improve anchors, please wait...')na = m.anchor_grid.numel() // 2 # number of anchorstry:# 如果bpr<0.98(最大为1 越大越好) 使用k-means + 遗传进化算法选择出与数据集更匹配的anchors框 [9, 2]anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)except Exception as e:print(f'{
prefix}ERROR: {
e}')# 计算新的anchors的new_bprnew_bpr = metric(anchors)[0]# 比较k-means + 遗传进化算法进化后的anchors的new_bpr和原始anchors的bpr# 注意: 这里并不一定进化后的bpr必大于原始anchors的bpr, 因为两者的衡量标注是不一样的 进化算法的衡量标准是适应度 而这里比的是bprif new_bpr > bpr: # replace anchorsanchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)# 替换m的anchor_grid [9, 2] -> [3, 1, 3, 1, 1, 2]m.anchor_grid[:] = anchors.clone().view_as(m.anchor_grid) # for inference# 替换m的anchors(相对各个feature map) [9, 2] -> [3, 3, 2]m.anchors[:] = anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # loss# 检查anchor顺序和stride顺序是否一致 不一致就调整# 因为我们的m.anchors是相对各个feature map 所以必须要顺序一致 否则效果会很不好check_anchor_order(m)print(f'{
prefix}New anchors saved to model. Update model *.yaml to use these anchors in the future.')else:print(f'{
prefix}Original anchors better than new anchors. Proceeding with original anchors.')print('') # newline
这个函数会在train.py中调用:

3、kmean_anchors
\qquad这个函数才是这个这个文件的核心函数,功能:使用K-means + 遗传算法 算出更符合当前数据集的anchors。
\qquad这里不仅仅使用了k-means聚类,还使用了Genetic Algorithm遗传算法,在k-means聚类的结果上进行mutation变异。接下来简单介绍下代码流程:
- 载入数据集,得到数据集中所有数据的wh
- 将每张图片中wh的最大值等比例缩放到指定大小img_size,较小边也相应缩放
- 将bboxes从相对坐标改成绝对坐标(乘以缩放后的wh)
- 筛选bboxes,保留wh都大于等于两个像素的bboxes
- 使用k-means聚类得到n个anchors(掉k-means包 涉及一个白化操作)
- 使用遗传算法随机对anchors的wh进行变异,如果变异后效果变得更好(使用anchor_fitness方法计算得到的fitness(适应度)进行评估)就将变异后的结果赋值给anchors,如果变异后效果变差就跳过,默认变异1000次
\qquad如果不知道什么是遗传算法,可以看看这两个b站视频:遗传算法超细致+透彻理解 和 霹雳吧啦Wz
def kmean_anchors(path='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):"""在check_anchors中调用使用K-means + 遗传算法 算出更符合当前数据集的anchorsCreates kmeans-evolved anchors from training dataset:params path: 数据集的路径/数据集本身:params n: anchor框的个数:params img_size: 数据集图片约定的大小:params thr: 阈值 由hyp['anchor_t']参数控制:params gen: 遗传算法进化迭代的次数(突变 + 选择):params verbose: 是否打印所有的进化(成功的)结果 默认传入是Fasle的 只打印最佳的进化结果即可:return k: k-means + 遗传算法进化 后的anchors"""from scipy.cluster.vq import kmeans# 注意一下下面的thr不是传入的thr,而是1/thr, 所以在计算指标这方面还是和check_anchor一样thr = 1. / thr # 0.25prefix = colorstr('autoanchor: ')def metric(k, wh): # compute metrics"""用于print_results函数和anchor_fitness函数计算ratio metric: 整个数据集的gt框与anchor对应宽比和高比即:gt_w/k_w,gt_h/k_h + x + best_x 用于后续计算bpr+aat注意我们这里选择的metric是gt框与anchor对应宽比和高比 而不是常用的iou 这点也与nms的筛选条件对应 是yolov5中使用的新方法:params k: anchor框:params wh: 整个数据集的wh [N, 2]:return x: [N, 9] N个gt框与所有anchor框的宽比或高比(两者之中较小者):return x.max(1)[0]: [N] N个gt框与所有anchor框中的最大宽比或高比(两者之中较小者)"""# [N, 1, 2] / [1, 9, 2] = [N, 9, 2] N个gt_wh和9个anchor的k_wh宽比和高比# 两者的重合程度越高 就越趋近于1 远离1(<1 或 >1)重合程度都越低r = wh[:, None] / k[None]# r=gt_height/anchor_height gt_width / anchor_width 有可能大于1,也可能小于等于1# torch.min(r, 1. / r): [N, 9, 2] 将所有的宽比和高比统一到<=1# .min(2): value=[N, 9] 选出每个gt个和anchor的宽比和高比最小的值 index: [N, 9] 这个最小值是宽比(0)还是高比(1)# [0] 返回value [N, 9] 每个gt个和anchor的宽比和高比最小的值 就是所有gt与anchor重合程度最低的x = torch.min(r, 1. / r).min(2)[0] # ratio metric# x = wh_iou(wh, torch.tensor(k)) # iou metric# x.max(1)[0]: [N] 返回每个gt和所有anchor(9个)中宽比/高比最大的值return x, x.max(1)[0] # x, best_xdef anchor_fitness(k): # mutation fitness"""用于kmean_anchors函数适应度计算 优胜劣汰 用于遗传算法中衡量突变是否有效的标注 如果有效就进行选择操作 没效就继续下一轮的突变:params k: [9, 2] k-means生成的9个anchors wh: [N, 2]: 数据集的所有gt框的宽高:return (best * (best > thr).float()).mean()=适应度计算公式 [1] 注意和bpr有区别 这里是自定义的一种适应度公式返回的是输入此时anchor k 对应的适应度"""_, best = metric(torch.tensor(k, dtype=torch.float32), wh)return (best * (best > thr).float()).mean() # fitnessdef print_results(k):"""用于kmean_anchors函数中打印k-means计算相关信息计算bpr、aat=>打印信息: 阈值+bpr+aat anchor个数+图片大小+metric_all+best_mean+past_mean+Kmeans聚类出来的anchor框(四舍五入):params k: k-means得到的anchor k:return k: input"""# 将k-means得到的anchor k按面积从小到大啊排序k = k[np.argsort(k.prod(1))]# x: [N, 9] N个gt框与所有anchor框的宽比或高比(两者之中较小者)# best: [N] N个gt框与所有anchor框中的最大 宽比或高比(两者之中较小者)x, best = metric(k, wh0)# (best > thr).float(): True=>1. False->0. .mean(): 求均值# bpr(best possible recall): 最多能被召回(通过thr)的gt框数量 / 所有gt框数量 [1] 0.96223 小于0.98 才会用k-means计算anchor# aat(anchors above threshold): [1] 3.54360 每个target平均有多少个anchorsbpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thrf = anchor_fitness(k)# print(f'{prefix}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr')# print(f'{prefix}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, '# f'past_thr={x[x > thr].mean():.3f}-mean: ', end='')print(f"aat: {
aat:.5f}, fitness: {
f:.5f}, best possible recall: {
bpr:.5f}")for i, x in enumerate(k):print('%i,%i' % (round(x[0]), round(x[1])), end=', ' if i < len(k) - 1 else '\n') # use in *.cfgreturn k# 载入数据集if isinstance(path, str): # *.yaml filewith open(path) as f:data_dict = yaml.safe_load(f) # model dictfrom utils.datasets import LoadImagesAndLabelsdataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)else:dataset = path # dataset# 得到数据集中所有数据的wh# 将数据集图片的最长边缩放到img_size, 较小边相应缩放shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)# 将原本数据集中gt boxes归一化的wh缩放到shapes尺度wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)])# 统计gt boxes中宽或者高小于3个像素的个数, 目标太小 发出警告i = (wh0 < 3.0).any(1).sum()if i:print(f'{
prefix}WARNING: Extremely small objects found. {
i} of {
len(wh0)} labels are < 3 pixels in size.')# 筛选出label大于2个像素的框拿来聚类,[...]内的相当于一个筛选器,为True的留下wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels# wh = wh * (np.random.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1# Kmeans聚类方法: 使用欧式距离来进行聚类print(f'{
prefix}Running kmeans for {
n} anchors on {
len(wh)} gt boxes...')# 计算宽和高的标准差->[w_std,h_std]s = wh.std(0) # sigmas for whitening# 开始聚类,仍然是聚成n类,返回聚类后的anchors k(这个anchor k是白化后数据的anchor框)# 另外还要注意的是这里的kmeans使用欧式距离来计算的# 运行k-means的次数为30次 obs: 传入的数据必须先白化处理 'whiten operation'# 白化处理: 新数据的标准差=1 降低数据之间的相关度,不同数据所蕴含的信息之间的重复性就会降低,网络的训练效率就会提高# 白化操作博客: https://blog.csdn.net/weixin_37872766/article/details/102957235k, dist = kmeans(wh / s, n, iter=30) # points, mean distanceassert len(k) == n, print(f'{
prefix}ERROR: scipy.cluster.vq.kmeans requested {
n} points but returned only {
len(k)}')k *= s # k*s 得到原来数据(白化前)的anchor框wh = torch.tensor(wh, dtype=torch.float32) # filtered whwh0 = torch.tensor(wh0, dtype=torch.float32) # unfiltered wh0# 输出新算的anchors k 相关的信息k = print_results(k)# Plot wh# k, d = [None] * 20, [None] * 20# for i in tqdm(range(1, 21)):# k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance# fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)# ax = ax.ravel()# ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')# fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh# ax[0].hist(wh[wh[:, 0]<100, 0], 400)# ax[1].hist(wh[wh[:, 1]<100, 1], 400)# fig.savefig('wh.png', dpi=200)# Evolve 类似遗传/进化算法 变异操作npr = np.random # 随机工具# f: fitness 0.62690# sh: (9,2)# mp: 突变比例mutation prob=0.9 s: sigma=0.1f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigmapbar = tqdm(range(gen), desc=f'{
prefix}Evolving anchors with Genetic Algorithm:') # progress bar# 根据聚类出来的n个点采用遗传算法生成新的anchorfor _ in pbar:# 重复1000次突变+选择 选择出1000次突变里的最佳anchor k和最佳适应度fv = np.ones(sh) # v [9, 2] 全是1while (v == 1).all():# 产生变异规则 mutate until a change occurs (prevent duplicates)# npr.random(sh) < mp: 让v以90%的比例进行变异 选到变异的就为1 没有选到变异的就为0v = ((npr.random(sh) < mp) * npr.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)# 变异(改变这一时刻之前的最佳适应度对应的anchor k)kg = (k.copy() * v).clip(min=2.0)# 计算变异后的anchor kg的适应度fg = anchor_fitness(kg)# 如果变异后的anchor kg的适应度>最佳适应度k 就进行选择操作if fg > f:# 选择变异后的anchor kg为最佳的anchor k 变异后的适应度fg为最佳适应度ff, k = fg, kg.copy()# 打印信息pbar.desc = f'{
prefix}Evolving anchors with Genetic Algorithm: fitness = {
f:.4f}'if verbose:print_results(k)return print_results(k)
如下图当原始anchor bpr>0.98就不会再更新anchor:

但当原始anchor bpr<0.98就可以看到上面是通过k-means(欧式距离)聚类得到的anchors 下面是通过遗传算法得到的anchors:

总结
\qquad这个文件主要就是 K-means_anchors 这个函数比较重要也比较难,涉及到一些机器学习的知识如:K-means、百化操作、遗传算法等需要补补课。先看我下面的Reference几篇文章和视频,再回过头来看这里的代码,加上我的注释,应该就不是很难了,有问题下面讨论区交流。
Reference
CSDN 霹雳吧啦Wz : 使用k-means聚类anchors.
Bilibili 霹雳吧啦Wz : 如何使用k-means聚类得到anchors以及需要注意的坑.
CSDN 恩泽君 : YOLOV3中k-means聚类获得anchor boxes过程详解.
Github 恩泽君: Laughing-q/yolov5_annotations.
CSDN 昌山小屋: 【玩转yolov5】请看代码之自动anchor计算.
CSDN TheOldManAndTheSea: 目标检测 YOLOv5 anchor设置
Bilibili 我家公子Q: 遗传算法超细致+透彻理解