三维场景下使用交集、并集、差集方法CSG建模
- 1. CSG介绍
- 2. demo效果
- 3. 实现过程
-
- 3.1 交集、并集、差集函数
- 3.2 旋转矩阵
- 3.3 基础形状
- 3.4 组合过程
-
- 3.4.1 互相垂直圆柱实现
- 3.4.2 相交的球体与立方体
- 3.4.3 二者取差集
- 4. demo代码
1. CSG介绍
上一篇文章学习了模型的基本变换(旋转、缩放、平移),这篇简单说说CSG建模,即构造实体形状,它是一种通过交集、并集、差集的运算用简单的几何形状创建复杂几何形状的方法,下面的图片可以清楚的描述这种方式建模的思路和过程

2. demo效果
sdf-csg
这个demo按照上面的图片中的思路,使用基础形状圆柱、立方体、球体通过交集、并集、差集将它们组合而成
3. 实现过程
3.1 交集、并集、差集函数
之前在二维空间中实现过交集、并集、差集函数,转换到三维空间思路是一样的,不过这一次处理的时候是附带了材质,所以使用x分量即距离进行比较,返回的是输入的其中一个vec2变量,具体如下
//交集
vec2 opI( vec2 d1, vec2 d2 )
{
return (d1.x>d2.x) ? d1 : d2;
} //并集
vec2 opU( vec2 d1, vec2 d2 )
{
return (d1.x<d2.x) ? d1 : d2;
}//差集
vec2 opS( vec2 d1, vec2 d2 )
{
return opI(d1,-d2);
}
3.2 旋转矩阵
旋转矩阵与上一篇文章中的一模一样,直接搬过来,如下
//绕z轴旋转矩阵
mat4 rotZ(float a) {
return mat4(cos(a),-sin(a),0.0,0.0,sin(a),cos(a),0.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,0.0,1.0);
}//绕x轴旋转矩阵
mat4 rotX(float a) {
return mat4(1.0,0.0,0.0,0.0,0.0,cos(a),-sin(a),0.0,0.0,sin(a),cos(a),0.0,0.0,0.0,0.0,1.0);
}//绕y轴旋转矩阵
mat4 rotY(float a) {
return mat4(cos(a),0.0,sin(a),0.0,0.0,1.0,0.0,0.0,-sin(a),0.0,cos(a),0.0,0.0,0.0,0.0,1.0);
}
3.3 基础形状
我们这用到的基础形状是圆柱、立方体、球体,它们的sdf函数如下
//球体
float sdSphere( vec3 p, float s )
{
return length(p)-s;
}//立方体
float sdBox( vec3 p, vec3 b,float rad )
{
vec3 d = abs(p) - b;return min(max(d.x,max(d.y,d.z)),0.0) + length(max(d,0.0)) - rad;
}//圆柱
float sdCylinder( vec3 p, float h, float r )
{
vec2 d = abs(vec2(length(p.xz),p.y)) - vec2(r,h);return min(max(d.x,d.y),0.0) + length(max(d,0.0));
}
3.4 组合过程
3.4.1 互相垂直圆柱实现
相交圆柱的实现就是绘制三根相互垂直的圆柱,然后用并集函数将它们合并,绘制过程是首先绘制出一根圆柱,然后将坐标系绕Z轴旋转90度绘制第二个圆柱,接着再将坐标系绕X轴旋转90度绘制第三根圆柱,最后合并它们,实现过程如下
//绘制三根垂直相交的圆柱
vec3 pos = p-vec3(0,2,5);//确定模型的中心
vec4 cylindersPos = vec4(pos,1.0);//转为其次坐标
cylindersPos*=rotY(u_time);//旋转vec2 cylinder1 = vec2(sdCylinder(cylindersPos.xyz,2.0,0.6),1.0);float angle = radians(90.0);//角度转为弧度cylindersPos*=rotZ(angle);
vec2 cylinder2 = vec2(sdCylinder(cylindersPos.xyz,2.0,0.6),1.0);cylindersPos*=rotX(angle);
vec2 cylinder3 = vec2(sdCylinder(cylindersPos.xyz,2.0,0.6),1.0);// 三根圆柱取交集
vec2 cylinderRes = opU(cylinder1,cylinder2);
cylinderRes = opU(cylinderRes,cylinder3);
绘制结果

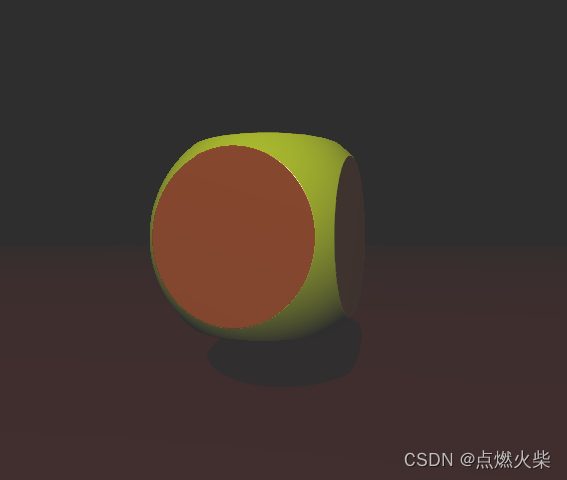
3.4.2 相交的球体与立方体
这一步比较简单,就是绘制球体与立方体然后求交集
pos = p-vec3(0,2,5);//屏幕坐标重置
vec4 boxPos = vec4(pos,1.0);//转为其次坐标
boxPos*=rotY(u_time);//旋转vec2 box = vec2(sdBox(boxPos.xyz,vec3(1.0),0.06),2.0);//方块,材质ID为2.0vec2 sphere = vec2(sdSphere(boxPos.xyz,1.4),3.0);//方块,材质ID为2.0vec2 boxSphere = opI(box,sphere);//方块和球取交集
绘制结果
3.4.3 二者取差集
这一步只需要将上面两步取差集,返回即可
vec2 res = opS(boxSphere,cylinderRes);//方块和球交集结果与三个垂直圆柱取差集res = opU(plane,res); //差集结果与地板取交集return res;
绘制结果

你会发现被掏空的地方是粉色,这个色来自哪里呢,来自main函数中的默认材质色
vec3 materialColor = vec3(1.0, 0.0, 1.0);//默认材质色,使用差集计算出来的内壁会使用该色填充
4. demo代码
又到了最后时刻,上全部代码!
<body><div id="container"></div><script src="http://www.yanhuangxueyuan.com/versions/threejsR92/build/three.js"></script><script>var container;var camera, scene, renderer;var uniforms;var vertexShader = `void main() {gl_Position = vec4( position, 1.0 );} `var fragmentShader = `#ifdef GL_ESprecision mediump float;#endifuniform float u_time;uniform vec2 u_mouse;uniform vec2 u_resolution;const int MAX_STEPS = 100;//最大步进步数const float MAX_DIST = 100.0;//最大步进距离const float SURF_DIST = 0.01;//相交检测临近表面距离//绕z轴旋转矩阵mat4 rotZ(float a) {return mat4(cos(a),-sin(a),0.0,0.0,sin(a),cos(a),0.0,0.0,0.0,0.0,1.0,0.0,0.0,0.0,0.0,1.0);}//绕x轴旋转矩阵mat4 rotX(float a) {return mat4(1.0,0.0,0.0,0.0,0.0,cos(a),-sin(a),0.0,0.0,sin(a),cos(a),0.0,0.0,0.0,0.0,1.0);}//绕y轴旋转矩阵mat4 rotY(float a) {return mat4(cos(a),0.0,sin(a),0.0,0.0,1.0,0.0,0.0,-sin(a),0.0,cos(a),0.0,0.0,0.0,0.0,1.0);} //交集vec2 opI( vec2 d1, vec2 d2 ){return (d1.x>d2.x) ? d1 : d2;} //并集vec2 opU( vec2 d1, vec2 d2 ){return (d1.x<d2.x) ? d1 : d2;}//差集vec2 opS( vec2 d1, vec2 d2 ){return opI(d1,-d2);}//球体float sdSphere( vec3 p, float s ){return length(p)-s;}//立方体float sdBox( vec3 p, vec3 b,float rad ){vec3 d = abs(p) - b;return min(max(d.x,max(d.y,d.z)),0.0) + length(max(d,0.0)) - rad;}//圆柱float sdCylinder( vec3 p, float h, float r ){vec2 d = abs(vec2(length(p.xz),p.y)) - vec2(r,h);return min(max(d.x,d.y),0.0) + length(max(d,0.0));}vec2 getDistandMaterial(vec3 p){vec2 plane = vec2(p.y,0.0);//地面//绘制三根垂直相交的圆柱vec3 pos = p-vec3(0,2,5);//确定模型的中心vec4 cylindersPos = vec4(pos,1.0);//转为其次坐标cylindersPos*=rotY(u_time);//旋转vec2 cylinder1 = vec2(sdCylinder(cylindersPos.xyz,2.0,0.6),1.0);float angle = radians(90.0);//角度转为弧度cylindersPos*=rotZ(angle);vec2 cylinder2 = vec2(sdCylinder(cylindersPos.xyz,2.0,0.6),1.0);cylindersPos*=rotX(angle);vec2 cylinder3 = vec2(sdCylinder(cylindersPos.xyz,2.0,0.6),1.0);// 三根圆柱取交集vec2 cylinderRes = opU(cylinder1,cylinder2);cylinderRes = opU(cylinderRes,cylinder3);pos = p-vec3(0,2,5);//屏幕坐标重置vec4 boxPos = vec4(pos,1.0);//转为其次坐标boxPos*=rotY(u_time);//旋转vec2 box = vec2(sdBox(boxPos.xyz,vec3(1.0),0.06),2.0);//方块,材质ID为2.0vec2 sphere = vec2(sdSphere(boxPos.xyz,1.4),3.0);//方块,材质ID为2.0vec2 boxSphere = opI(box,sphere);//方块和球取交集vec2 res = opS(boxSphere,cylinderRes);//方块和球交集结果与三个垂直圆柱取差集res = opU(plane,res); //差集结果与地板取交集return res;}vec2 rayMarch(vec3 rayStart, vec3 rayDirection) {float depth=0.;float material=0.;for(int i=0; i<MAX_STEPS; i++) {vec3 p = rayStart + rayDirection*depth;//上一次步进结束后的坐标也就是这一次步进出发点vec2 dm = getDistandMaterial(p);float dist = dm.x;//获取当前步进出发点与物体相交时距离material = dm.y;depth += dist; //步进长度累加if(depth>MAX_DIST || dist<SURF_DIST) break;//步进距离大于最大步进距离或与物体表面距离小于最小表面距离(光线进入物体)停止前进}return vec2(depth,material);}vec3 getNormal(vec3 p){return normalize(vec3(getDistandMaterial(vec3(p.x + SURF_DIST, p.y, p.z)).x - getDistandMaterial(vec3(p.x - SURF_DIST, p.y, p.z)).x,getDistandMaterial(vec3(p.x, p.y + SURF_DIST, p.z)).x - getDistandMaterial(vec3(p.x, p.y - SURF_DIST, p.z)).x,getDistandMaterial(vec3(p.x, p.y, p.z + SURF_DIST)).x - getDistandMaterial(vec3(p.x, p.y, p.z - SURF_DIST)).x));}//Blinn-Phong模型光照计算vec3 calcBlinnPhongLight( vec3 materialColor, vec3 p, vec3 ro) {vec3 lightPos = vec3(5.0 * sin(u_time), 20.0, 10.0*cos(u_time)-18.);//光源坐标//计算环境光float k_a = 0.3;//环境光反射系数vec3 ambientLight = 0.6 * vec3(1.0, 1.0, 1.0);vec3 ambient = k_a*ambientLight;vec3 N = getNormal(p); //法线vec3 L = normalize(lightPos - p); //光照方向vec3 V = normalize(ro - p); //视线vec3 H = normalize(V+L); //半程向量float r = length(lightPos - p);//计算漫反射光float k_d = 0.6;//漫反射系数float dotLN = clamp(dot(L, N),0.0,1.0);//点乘,并将结果限定在0~1vec3 diffuse = k_d * (materialColor/r*r) * dotLN;//计算高光反射光float k_s = 0.8;//镜面反射系数float shininess = 160.0;vec3 specularColor = vec3(1.0, 1.0, 1.0);vec3 specular = k_s * (specularColor/r*r)* pow(clamp(dot(N, H), 0.0, 1.0), shininess);//计算高光//计算阴影vec2 res = rayMarch(p + N*SURF_DIST*2.0,L); if(res.x<length(lightPos-p)-0.001){diffuse*=0.1;}//颜色 = 环境光 + 漫反射光 + 镜面反射光return ambient +diffuse + specular;}void main( void ) {//窗口坐标调整为[-1,1],坐标原点在屏幕中心vec2 st = (gl_FragCoord.xy * 2. - u_resolution) / u_resolution.y;vec3 ro = vec3(0.0,2.0,0.0);//视点vec3 rd = normalize(vec3(st.x,st.y,1.0));//视线方向vec2 res = rayMarch(ro,rd);//反向光线追踪求交点距离与材质IDfloat d = res.x;//物体与视点的距离float m = res.y;//材质IDvec3 p = ro + rd * d;vec3 materialColor = vec3(1.0, 0.0, 1.0);//默认材质色,使用差集计算出来的内壁会使用该色填充//为不同物体设置不同的材质颜色if(m==0.0){materialColor = vec3(.2, 0.0, 0.0);}if(m==1.0){materialColor = vec3(.2, 0.0, 1.0);}if(m==2.0){materialColor = vec3(.7, 0.2, 0.0);}if(m==3.0){materialColor = vec3(.8, .9, 0.0);}vec3 color = vec3(1.0,1.0,1.0);//使用Blinn-Phong模型计算光照color *= calcBlinnPhongLight( materialColor, p, ro);gl_FragColor = vec4(color, 1.0);}`init();animate();function init() {
container = document.getElementById('container');camera = new THREE.Camera();camera.position.z = 1;scene = new THREE.Scene();var geometry = new THREE.PlaneBufferGeometry(2, 2);uniforms = {
u_time: {
type: "f",value: 1.0},u_resolution: {
type: "v2",value: new THREE.Vector2()},u_mouse: {
type: "v2",value: new THREE.Vector2()}};var material = new THREE.ShaderMaterial({
uniforms: uniforms,vertexShader: vertexShader,fragmentShader: fragmentShader});var mesh = new THREE.Mesh(geometry, material);scene.add(mesh);renderer = new THREE.WebGLRenderer();//renderer.setPixelRatio(window.devicePixelRatio);container.appendChild(renderer.domElement);onWindowResize();window.addEventListener('resize', onWindowResize, false);document.onmousemove = function (e) {
uniforms.u_mouse.value.x = e.pageXuniforms.u_mouse.value.y = e.pageY}}function onWindowResize(event) {
renderer.setSize(800, 800);uniforms.u_resolution.value.x = renderer.domElement.width;uniforms.u_resolution.value.y = renderer.domElement.height;}function animate() {
requestAnimationFrame(animate);render();}function render() {
uniforms.u_time.value += 0.02;renderer.render(scene, camera);}</script>
</body>