���Dz����ͼ���У��
�����Dz���
�������������ƽ�澫λ��ͬһƽ���ϣ����ж��룬���������ϸ�ƽ�С�

���������ι�ϵ�����Dz����Ƴ�Zֵ��

������� c x l c_{x}^{l} cxl?�� c x r c_{x}^{r} cxr?������ͬ��ɼ�Ϊ��

��Ϊ�Ӳ� d = x l ? x r d = x^{l}-x^{r} d=xl?xr���� Z Z ZΪ���ǵ����ֵ d e p t h depth depth���ʣ�
d e p t h = f T d depth = \frac{fT}{d} depth=dfT?
���Ӳ������ͼ��ϵ
��1���Ӳ�����ȳɷ��ȣ��Ӳ�ӽ�0ʱ��С���Ӳ�仯������ϴ����ȱ仯��
��2�����Ӳ�ϴ�ʱ��С���Ӳ�仯��������������ȶ��ı仯��
��3����ˣ������Ӿ�ϵͳ�������������Ͻ�ʱ���нϸߵ���Ⱦ��ȡ�
��������
��1��У���Ĺ��̣����ǽ��������ѧ�϶���ͬһ�۲�ƽ���ϣ�ʹ��������������ϸ����ġ�
��2��У����Ŀ�ģ�������ͼ��Ķ�άƥ���������һά����ʡ���������ų����ƥ��㡣

��У���㷨
Ϊ�˽��������任������Զʹ�ü���ˮƽ�������Ǵ���һ����ת���������� X X X�����ת�����ǽ� X X X����ת���������ͬ�ķ�����ת���� X X X����� O l ? O r O_{l}-O_{r} Ol??Or?����ת������ e 1 = T �O T �O e_{1}=\frac{T}{|T|} e1?=�OT�OT?��
ȷ����ת����� Y Y Y�ᣬֻ�������� e 1 e_{1} e1?�������ɣ�ѡ����������� e 1 e_{1} e1?�ཻ�ķ���
e 2 = e 1 �� ( R l [ 0 , 0 , 1 ] T + t l ) e_{2}=e_{1} \times (R_{l}[0,0,1]^{T}+t_{l}) e2?=e1?��(Rl?[0,0,1]T+tl?)
�µ� Z Z Z�ᣬ�� e 1 , e 2 e_{1},e_{2} e1?,e2?��ֱ���������ַ��� e 3 = e 1 �� e 2 e_{3}=e_{1} \times e_{2} e3?=e1?��e2?��
���յõ�����ת���� R n e w = [ e 1 , e 2 , e 3 ] R_{new}=[e_{1},e_{2},e_{3}] Rnew?=[e1?,e2?,e3?]��
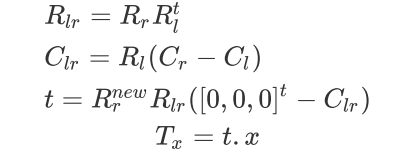
�µ���ת���� R l n e w = R n e w R l t R_{l}^{new}=R_{new}R_{l}^{t} Rlnew?=Rnew?Rlt?�� R r n e w R n e w R r t R_{r}^{new}R_{new}R_{r}^{t} Rrnew?Rnew?Rrt?,
У����baseline T T T���㣺

��ʽ�� c l r c_{lr} clr?��ָ��������������������ϵ�µ����꣨Ҳ���������������[0,0,0]�ľ��룩�� t��ʽ������������������������У���������ϵ�µ����꣨Ҳ�����������У���������ϵ�¹���[0,0,0]�ľ��룩����baseline����x�᷽��ľ��롣
���Ӳ�ͼת���ͼ
�Ӳ�ͼ��У���������ϵ�µõ���ֵ,���Ƚ���ת��ΪУ��������ϵ�µ����ͼ
��֪��

��

����ʽд�ɾ�����ʽ��
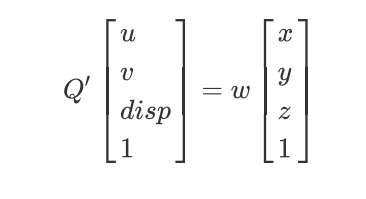
ʽ�� Q �� , w Q^{'},w Q��,w�������£�

��У���������ϵ�����ͼת����У��ǰ���������ϵ��
��֪��У��ǰ���������ϵ������ ( x , y , z ) (x,y,z) (x,y,z)ת��У�����������ϵ������ ( x �� , y �� , z �� ) (x^{'},y^{'},z^{'}) (x��,y��,z��)ת����ϵ���£�
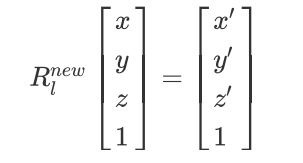
����֪У�������У��ǰ�Ĺ�ʽ����:
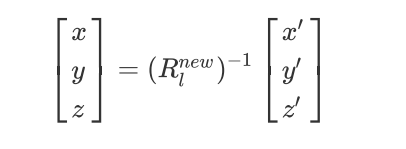
�ٽ���ͶӰ��ͼ������ϵ�£�
����
���������ϲ��õ�У��������ϵ�µ��Ӳ�ͼ ( u �� , v �� , d i s p ) (u^{'},v^{'},disp) (u��,v��,disp) ��У��ǰ������ϵ�µ����ͼ ( u , v , d e p t h ) (u,v,depth) (u,v,depth)��ת������ Q Q Q����֪��

��

������ƥ��
��ά�ؽ��ĺ��ľ�������ƥ�䡣ͨ��Ѱ��ƥ��㣬�������Dz�����Լ�Լ���õ����ڿռ��е�3D��Ϣ��
����ƥ���㷨��Ҫ��Ϊȫ�֡��ֲ�����ȫ�֡�
��1��ȫ������ƥ���㷨��
ȫ������ƥ���㷨��Ҫ�Dz�����ȫ�ֵ��Ż����۷��������Ӳ����ȫ������������ͨ����С��ȫ�����������õ������Ӳ�ֵ��ͨ����ά���������Ӳ�֮���Լ������ƽ����Լ�������õ����õ�ƥ��Ч�������Ƕ��ڴ��ռ�������ٶ������ʺ�ʵʱ���С���Ҫ���㷨��ͼ�graph cuts�����������belief propagation������̬�滮���㷨��
��2���ֲ�����ƥ���㷨��
��Ҫ�Dz��þֲ��Ż����������Ӳ�ֵ���ƣ��ֲ�����ƥ���㷨�� SAD��SSD ���㷨����ȫ������ƥ��
�㷨һ����Ҳ��ͨ��������С�����������Ӳ���ƣ����������������У�ֻ���������û��ƽ���
���㷨����ÿ�����ؼ��㻥�����ſ��Բ��м��㣬���Կ���ʵʱ�������������ڵľֲ������Ӳ���ͬ��
�����ںܶ�����²�����������ƥ��Ч���ϲ
��3����ȫ������ƥ���㷨SGM
�ۺ������ֲ���ȫ���㷨����ȱ�㣬��ȫ���㷨���ɲ���ȫ�ֿ�ܣ������ڼ�������������С���IJ���
ʱʹ�ø�Ч�ʵ�һά·���ۺϷ���������ȫ���㷨�еĶ�ά��С���㷨��ʹ��һά���������ƶ�ά���ţ��õ����Ӳ�ͼ��Ч���Ϻ�ȫ���㷨û��̫��IJ�𣬵����㷨Ч��ȴ�зdz����������