���ã�
-
��ת����3X3��:Eigen::Matrix3d
-
��ת������3X1��:Eigen::AngleAxisd
-
��Ԫ����4X1��:Eigen::Quaterniond
-
ƽ��������3X1��:Eigen::Vector3d
- �任����4X4��:Eigen::Isometry3d
AngleAxis��angle, axis�����Ƹ�����ʱ����תangle(rad)��
�任����
Eigen::Isometry3d T;
T.matrix()���DZ任����������ʱ���.matrix()��;
T.pretranslate()�Լ�T.prerotate()���Ը�ƽ�Ʋ��ֺ���ת����ֵ��������ѭ����ʹ�ã�ĩβ�����ñ任����Ļ���������������ۼӣ������Ǹ�����
��Ԫ����ֵ��Eigen::Quaterniond Q;
Q.x() = 3 �����Ƶ� Q.y() = Q.z() = Q.w()����
- ��ת����R������ת������V������Ԫ����Q����Eigen��ת����ϵ���ܽ
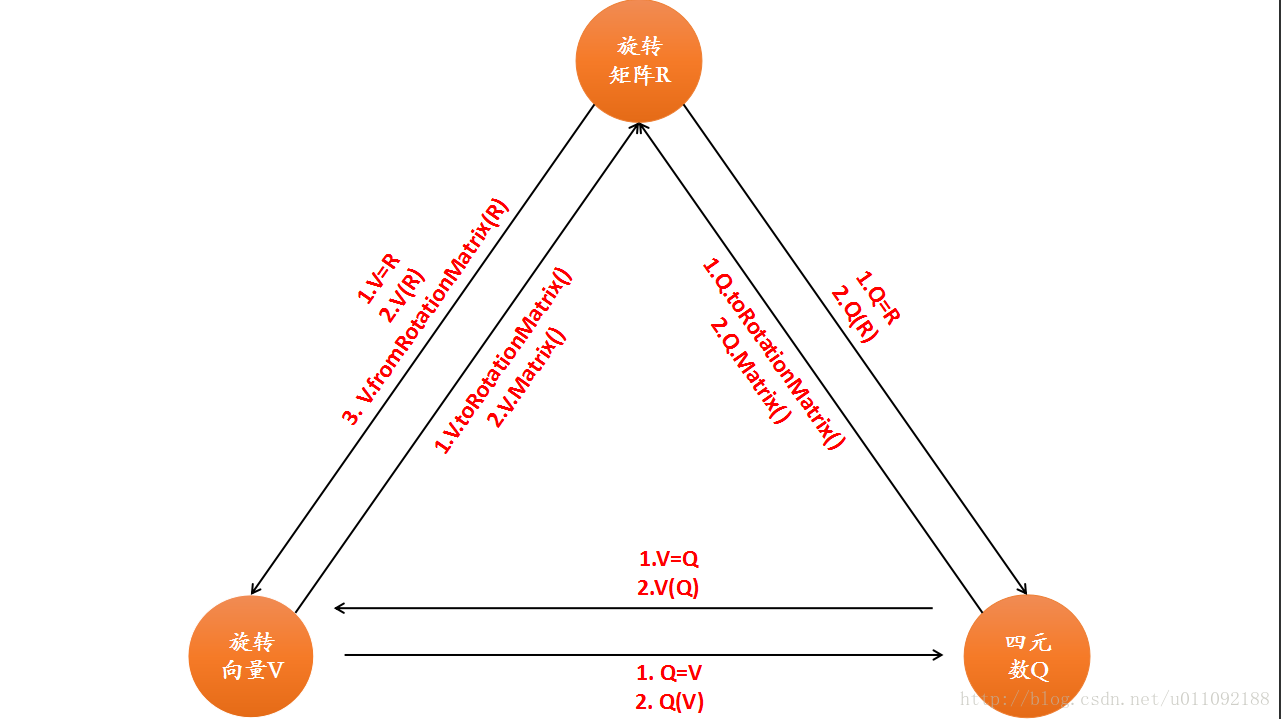
2.��ת����R������ת������V������Ԫ����Q���ֱ�ͨ��������ʼ���Լ��ķ�ʽ��
Rͨ��������ʼ���ķ�����
//1.ʹ����ת����ĺ�������ʼ����ת����
Matrix3d R1=Matrix3d::Identity();
cout << "Rotation_matrix1" << endl << R1 << endl;
Vͨ��������ʼ���ķ�����
//1.ʹ����ת�ĽǶȺ���ת��������������Ϊ��λ����������ʼ������
AngleAxisd V1(M_PI / 4, Vector3d(0, 0, 1));//�ԣ�0,0,1��Ϊ��ת�ᣬ��ת45��
cout << "Rotation_vector1" << endl << V1.matrix() << endl;
Qͨ��������ʼ���ķ�����
//1.ʹ����ת�ĽǶȺ���ת��������������Ϊ��λ����������ʼ����Ԫ��,��ʹ��
q=[cos(A/2),n_x*sin(A/2),n_y*sin(A/2),n_z*sin(A/2)]
Quaterniond Q1(cos((M_PI / 4) / 2), 0 * sin((M_PI / 4) / 2), 0 * sin((M_PI / 4) / 2), 1 * sin((M_PI / 4) / 2));//�ԣ�0,0,1��Ϊ��ת�ᣬ��ת45��
cout << "Quaternion1" << endl << Q1.coeffs() << endl;
��ʾ����1��eigen_geometry.cpp
#include <iostream>
#include <Eigen/Dense>
#define M_PI 3.1415926using namespace std;
using namespace Eigen;void run_eigen_geometry()
{//��������������Ϊ������ʾ���м����AngleAxisd t_V(M_PI / 4, Vector3d(0, 0, 1));Matrix3d t_R = t_V.matrix();Quaterniond t_Q(t_V);//����ת��������ǣ���ֵ�������cout << "����ת��������ǣ���ֵ�������" << endl;//1.ʹ����ת�ĽǶȺ���ת��������������Ϊ��λ����������ʼ������AngleAxisd V1(M_PI / 4, Vector3d(0, 0, 1));//�ԣ�0,0,1��Ϊ��ת�ᣬ��ת45��cout << "Rotation_vector1" << endl << V1.matrix() << endl;//2.ͨ����ת����ķ�ʽ//2.1 ʹ����ת������fromRotationMatrix()����������ת������ֵ��ע��˷���Ϊ��ת��������,��Ԫ��û�У�AngleAxisd V2;V2.fromRotationMatrix(t_R);cout << "Rotation_vector2" << endl << V2.matrix() << endl;//2.2 ֱ��ʹ����ת����������ת������ֵAngleAxisd V3;V3 = t_R;cout << "Rotation_vector3" << endl << V3.matrix() << endl;//2.3 ʹ����ת����������ת�������г�ʼ��AngleAxisd V4(t_R);cout << "Rotation_vector4" << endl << V4.matrix() << endl;//3. ʹ����Ԫ��������ת�������и�ֵ//3.1 ֱ��ʹ����Ԫ��������ת������ֵAngleAxisd V5;V5 = t_Q;cout << "Rotation_vector5" << endl << V5.matrix() << endl;//3.2 ʹ����Ԫ��������ת�������г�ʼ��AngleAxisd V6(t_Q);cout << "Rotation_vector6" << endl << V6.matrix() << endl;//------------------------------------------------------//����Ԫ����ֵ���������ע��Eigen���е���Ԫ��ǰ��ά���鲿,���һά��ʵ����cout << "����Ԫ����ֵ�������" << endl;//1.ʹ����ת�ĽǶȺ���ת��������������Ϊ��λ����������ʼ����Ԫ��,��ʹ��q=[cos(A/2),n_x*sin(A/2),n_y*sin(A/2),n_z*sin(A/2)]Quaterniond Q1(cos((M_PI / 4) / 2), 0 * sin((M_PI / 4) / 2), 0 * sin((M_PI / 4) / 2), 1 * sin((M_PI / 4) / 2));//�ԣ�0,0,1��Ϊ��ת�ᣬ��ת45��//��һ�������Ԫ���ķ�ʽcout << "Quaternion1" << endl << Q1.coeffs() << endl;//�ڶ��������Ԫ���ķ�ʽcout << Q1.x() << endl << endl;cout << Q1.y() << endl << endl;cout << Q1.z() << endl << endl;cout << Q1.w() << endl << endl;//2. ʹ����ת����ת��Ԫ���ķ�ʽ//2.1 ֱ��ʹ����ת����������ת������ֵQuaterniond Q2;Q2 = t_R;cout << "Quaternion2" << endl << Q2.coeffs() << endl;//2.2 ʹ����ת����������Ԫ�����г�ʼ��Quaterniond Q3(t_R);cout << "Quaternion3" << endl << Q3.coeffs() << endl;//3. ʹ����ת��������Ԫ�������и�ֵ//3.1 ֱ��ʹ����ת��������Ԫ������ֵQuaterniond Q4;Q4 = t_V;cout << "Quaternion4" << endl << Q4.coeffs() << endl;//3.2 ʹ����ת����������Ԫ�����г�ʼ��Quaterniond Q5(t_V);cout << "Quaternion5" << endl << Q5.coeffs() << endl;//----------------------------------------------------//����ת����ֵ�������cout << "����ת����ֵ�������" << endl;//1.ʹ����ת����ĺ�������ʼ����ת����Matrix3d R1 = Matrix3d::Identity();cout << "Rotation_matrix1" << endl << R1 << endl;//2. ʹ����ת����ת��ת����������ת����ֵ//2.1 ʹ����ת�����ij�Ա����matrix()������ת����ֵMatrix3d R2;R2 = t_V.matrix();cout << "Rotation_matrix2" << endl << R2 << endl;//2.2 ʹ����ת�����ij�Ա����toRotationMatrix()������ת����ֵMatrix3d R3;R3 = t_V.toRotationMatrix();cout << "Rotation_matrix3" << endl << R3 << endl;//3. ʹ����Ԫ��ת��ת����������ת����ֵ//3.1 ʹ����Ԫ���ij�Ա����matrix()������ת����ֵMatrix3d R4;R4 = t_Q.matrix();cout << "Rotation_matrix4" << endl << R4 << endl;//3.2 ʹ����Ԫ���ij�Ա����toRotationMatrix()������ת����ֵMatrix3d R5;R5 = t_Q.toRotationMatrix();cout << "Rotation_matrix5" << endl << R5 << endl;}��ʾ����2��eigen_geometry_2.cpp
#include <iostream>
#include <cmath>
#define M_PI 3.1415926
using namespace std;#include <Eigen/Core>
// Eigen ����ģ��
#include <Eigen/Geometry>/****************************
* ��������ʾ�� Eigen ����ģ���ʹ�÷���
****************************/void run_eigen_geometry_2()
{//ע��һ�������������һ���ַ�Ϊd��ʾ˫��������,����f��ʾ���������ͣ��������Ͳ��ܻ��ã�������ʾת��// Eigen/Geometry ģ���ṩ�˸�����ת��ƽ�Ƶı�ʾ// 3D ��ת����ֱ��ʹ�� Matrix3d �� Matrix3f/****��ת����****/// ��ת����ʹ�� AngleAxis, ���ײ㲻ֱ����Matrix����������Ե���������Ϊ�������������// ���Ը���������ʾ����һ������任//������ת����һ����ת���һ����ת�Ƕ�����ʾ��//��ת��������ת�����ķ�������ת��һ�£�����Ϊ��ת�Ƕȡ�/*********************************//*��ת�������� Z ����ת 45 �� �Ƕȡ��� */Eigen::AngleAxisd rotation_vector(M_PI / 4, Eigen::Vector3d(0, 0, 1)); //�� Z ����ת 45 ��cout.precision(3);cout << "rotation matrix =\n" << rotation_vector.matrix() << endl; //��matrix()ת���ɾ���,Ҳ����ֱ�Ӹ�ֵ/*********************************//*��ת����*/Eigen::Matrix3d rotation_matrix = Eigen::Matrix3d::Identity();//��λ��rotation_matrix = rotation_vector.toRotationMatrix();//ת����ת�����������ʽ����ת��// �� AngleAxis ���Խ�������任Eigen::Vector3d v(1, 0, 0);/*************��ת������������任********************/Eigen::Vector3d v_rotated = rotation_vector * v;cout << "(1,0,0) after rotation = " << v_rotated.transpose() << endl;// ��������ת����/*****************��ת�����������任****************/v_rotated = rotation_matrix * v;cout << "(1,0,0) after rotation = " << v_rotated.transpose() << endl;/**ŷ���DZ�ʾ����ת**/// ŷ����: ���Խ���ת����ֱ��ת����ŷ����Eigen::Vector3d euler_angles = rotation_matrix.eulerAngles(2, 1, 0); // ZYX˳��roll pitch yaw˳��cout << "yaw pitch roll = " << euler_angles.transpose() << endl;/***ŷʽ�任�����ʾ��ת**/// ŷ�ϱ任����ʹ�� Eigen::IsometryEigen::Isometry3d T = Eigen::Isometry3d::Identity();// ��Ȼ��Ϊ3d��ʵ������4��4�ľ����������T.rotate(rotation_vector); // ����rotation_vector������תT.pretranslate(Eigen::Vector3d(1, 3, 4)); // ��ƽ���������(1,3,4)cout << "Transform matrix = \n" << T.matrix() << endl;// �ñ任�����������任Eigen::Vector3d v_transformed = T*v; // �൱��R*v+tcout << "(1,0,0) after Isometry3d tranformed = " << v_transformed.transpose() << endl;// ���ڷ������Ӱ�任��ʹ�� Eigen::Affine3d �� Eigen::Projective3d ���ɣ���/*******��Ԫ����ʾ����ת***********/// ����ֱ�Ӱ�AngleAxis��ֵ����Ԫ������֮��Ȼ Quaterniond ��ʾ˫���ȡ���Ԫ�ء�Quaternionf����ʾ��������Ԫ��Eigen::Quaterniond q = Eigen::Quaterniond(rotation_vector);// ��ʾ��Z ����ת 45 �ȡ�����Ԫ�ر任 cout << "quaternion from AngleAxis rotation_vector = \n" << q.coeffs() << endl; // ��ע��coeffs��˳����(x,y,z,w),wΪʵ����ǰ����Ϊ�鲿// Ҳ������ת������q = Eigen::Quaterniond(rotation_matrix);cout << "quaternion from rotation_matrix = \n" << q.coeffs() << endl;// ʹ����Ԫ����תһ��������ʹ�����صij˷�����/*ע����������ʽ��ʵ������IJ�һ��*/v_rotated = q*v; // ע����ѧ����q*v*q^{-1} ������Ϊ�˼�ʾ��ֱ��ʹ�á�q*v����cout << "(1,0,0) after Quaterniond rotation = " << v_rotated.transpose() << endl;/*�����ĿС�ܲ�����λ��q1=[0.35,0.2,0.3,0.1],t1=[0.3,0.1,0.1]'��������������ϵ������任С�ܲ�����λ��q2=[-0.5,0.4,-0.1,0.2],t2=[-0.1,0.5,0.3]'С�ܲ����ſ���λ����������ϵ��p=[0.5,0,0.2]'���������С�ܲ������µ�����*/Eigen::Quaterniond q1(0.35, 0.2, 0.3, 0.1);//wxyz q1.coeffs() xyzw q1.vec() xyz//q1 << 0.35,0.2,0.3,0.1;Eigen::Matrix<double, 3, 1> t1;//float����t1 << 0.3, 0.1, 0.1;Eigen::Quaterniond q2(-0.5, 0.4, -0.1, 0.2);//q2 << -0.5,0.4,-0.1,0.2;Eigen::Matrix<double, 3, 1> t2;//float����t2 << -0.1, 0.5, 0.3;Eigen::Matrix<double, 3, 1> p1;//float����p1 << 0.5, 0, 0.2;cout << "q1= \n" << q1.coeffs() << endl;cout << "t1= \n" << t1 << endl;cout << "q2= \n" << q2.coeffs() << endl;cout << "t2= \n" << t2 << endl;/*q1.setIdentity();cout<<"q1 after setIdentity \n"<<q1.coeffs() <<endl;q2.setIdentity();cout<<"q2 after setIdentity \n"<<q2.coeffs() <<endl;*/q1 = q1.normalized();//�淶��������һ�� ����ģ��cout << "q1 after normalized\n" << q1.coeffs() << endl;q2 = q2.normalized();cout << "q2 after normalized \n" << q2.coeffs() << endl;Eigen::Matrix3d q1rotation_matrix = Eigen::Matrix3d::Identity();//��λ��q1rotation_matrix = q1.toRotationMatrix();Eigen::Isometry3d Tc1w = Eigen::Isometry3d::Identity();// ��Ȼ��Ϊ3d��ʵ������4��4�ľ����������Tc1w.rotate(q1rotation_matrix); // ����q1rotation_matrix������תTc1w.pretranslate(t1); // ��ƽ���������t1//Eigen::Isometry3d Twc1=Tc1w.inverse();//��world ��c1����任�����ɡ�c1��worldEigen::Matrix<double, 3, 1> pw = Tc1w.inverse()*p1; //��c1����ϵ�µĵ�p1�任��world����ϵ��Eigen::Matrix3d q2rotation_matrix = Eigen::Matrix3d::Identity();//��λ��q2rotation_matrix = q2.toRotationMatrix();Eigen::Isometry3d Tc2w = Eigen::Isometry3d::Identity();// ��Ȼ��Ϊ3d��ʵ������4��4�ľ����������Tc2w.rotate(q2rotation_matrix); // ����q1rotation_matrix������תTc2w.pretranslate(t2); // ��ƽ���������t1Eigen::Matrix<double, 3, 1> p2 = Tc2w*pw; //��world����ϵ�µĵ�pw�任��c2����ϵ��cout << "the loc of p1 in c1 = \n" << p1 << endl;cout << "the loc of p1 in world = \n" << pw << endl;cout << "the loc of p1 in c2 = \n" << p2 << endl;}
���https://blog.csdn.net/u011092188/article/details/77430988