��ʼ������ε���һ�����
ͼ��SfM
�Ӿ���IMU���
��ô֪�������˱ջ���
λ��ͼ�Ż��뻬���Ż���Ϊ�İ㣿
�ջ��Ż���������Ƥ��

�����ʼ���������£�
1��SFM���Ӿ����ƻ�������������֡��λ�˺�3D·��������ȣ�
2��SFM��IMUԤ��������ϣ���������ʼ��������
������Ҫ��������������н��⡣
1��SfM���Ӿ��˶�����
1.1 �Ӿ�������ػ���
1����֪��֡ͼ����������ȡfast��ƥ�䣨���������������ӣ���
2����֪��֡ͼ������ƥ��㣺���öԼ�����Լ����E����H����������ͼ��֮���pose��update to scale����
3����֪���pose����֪�������ά���꣺ͨ�����ǻ��õ���ά���ꣻ
4����֪3d�㣬3d�����㣺ͨ��Perspective-n-Point(PnP)��ȡ�µ����pose��

��ʼ��������estimator.cpp�ļ���processImage()�����У������ڵ��������������VIO�ij�ʼ�����������£�
// Step 3�� VIO��ʼ��
if( ESTIMATE_EXTRINSIC != 2 && (header.stamp.toSec() - initial_timestamp) > 0.1)
{result = initialStructure();initial_timestamp = header.stamp.toSec();
}��������initialStructure()�����Ĵ��´������������£�

Ϊ�˽����Ӿ���ʼ��������һ���������н��ͣ�

2.1 ��ʼ�����룺�Ӿ�����
initialStructure()���������Ƚ��е����Ӿ����ֵij�ʼ��������

���Կ�����Ҫ��������������
1. relativePose�����㵱ǰ֡���ο�֡�����λ��
2. GlobalSFM::construct��SfM���㻬���ڵ�·�������λ��
3. cv::solvePnP�����������
4. visualInitialAlign���Ӿ���IMU���룬��������ڽ���IMUԤ����֮���ٽ����������2.2.2�ڡ���
����˵��initialStructure()������initial�Ĺ������£�
Step1�����IMU�ɹ��ԣ�
1.1 ����ٶ��ۼƺ� �� ƽ��ֵ��
1.2 ���������ƽ��ֵ����ٶȷ���
1.3 ���ݷ�������ٶȱ��
Step2�����Ӿ�SFM
2.1 �������������㣬ÿ�������㹹��һ��sfmFeature
2.2 �����ǰ֡�����������һ֡���뻬��������IJο�֡�����λ�ˡ���relativePose(R,T,l)������
2.3 ����sfm���⣬����sfm��⡣��sfm.construct()������
��PS�����construct()�����Ƚ���Ҫ��һ����Ϊ�����ڹؼ�֡�ij�ʼ��˳����solveFrameByPnP()������������������������ϵ�µı�ʾ���ڵ�ǰ֡�µ�ͶӰ���������ǰ֡λ��R_cw������ע�����ﻹ�����ǻ��������õ�����ǰ֡ �� ���һ֡�����ο�֡����
2.4 ������֡���PnP�����ùؼ�֡��all_image_frame�еķǹؼ�֡���г�ʼ������cv::solvePnP()��������
Step3���Ӿ����Զ��롣��visualInitialAlign()������
���水���沽������initialStructure()��������չ����ϸ���⡣
2.1.1 �������������㣬����һ��sfmFeature
2.1.2 relativePose() ��ǰ֡���ο�֡��λ��
1. �Ҳο�֡��Ѱ������ǰ֡�Ĺ��ӵ����϶ࡢ���Ӳ����ϴ����Ϊ�ο�֡��
2. ���㹻���Ӳ��ͨ��2D-2D�Լ�Լ������������������ǰ֡���ο�֡�����λ��T��

�ٸ�����˵������Ѱ�Ҳο�֡�Լ��������ӵ��ϵ�������

2.1.3 GlobalSFM::construct() ����
�ڽ���construct()����ǰ�����ȿ�һ��GlobalSFM���õ��ļ���������

construct()�����Ĵ����������£�

�ٶ�����������в�⣺


�������ǻ�����δ�ָ��ĵ㣺

������һ��ȫ��BA��

Ceres�Զ��������£�


2.1.4 ��������֡λ��

2��SFM��IMUԤ���������
�Ӿ����Զ��뺯��visualInitialAlign()������Ҫ������VisualIMUAlignment()�����������������ŵ���
visualInitialAlign()����������Ƚ϶�һЩ�����˶����Ӿ���IMU֮�⣬��Ҫ

2.1 IMUԤ���ּ�������
2.1.1 IMU������ģ��

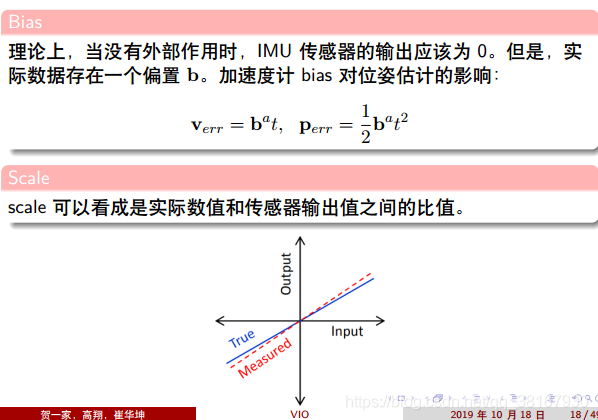
����ֵΪ��ʵֵ+����+biasƫ�á�
����֪ʶ�����ٶȼƺ������ǵ������Է�Ϊ��ȷ�����������
- ȷ��������������ȱ궨��������bias��scale...
- ������ͨ�������������Ӹ�˹�ֲ�����������˹��������bias�������...
2.2.2 IMUԤ����
��һ��ʱ���ڵ�IMU����ֱ�ӻ����������ܵõ�i��j֮�����IMU�IJ���Լ������Ԥ��������

����������PVQ�Ļ��ֹ�ʽ���У�

Ԥ���ֵ���ɢ��ʽ��
����mid-point����������������ʱ��k��k+1��λ����������ʱ�̵IJ���ֵa��w��ƽ��ֵ�����㣺

2.2 �Ӿ�SFM��IMUԤ���ֶ���
2.2.1 �Ӿ���IMU֮�����ϵ
�Ӿ�SFM��IMUԤ����֮����ڵļ���Լ�����£������������ϵc0Ϊ��������ϵ�������������qbc��tbc������ʽ��
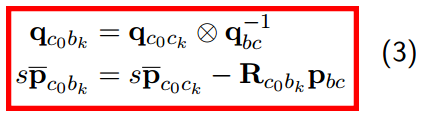
���У�sΪ�߶����ӣ���ʾ�����Ƶ�λ�Ĺ켣����ʽ��3���ȼ��ڣ�


2.2.2 �Ӿ���IMU��������
������������������Ӿ�sfm��IMUԤ���ֶ����

1����û����Σ��ȹ�����ת�����

ͼ�еĹ�ʽ��5����ϵ��Դ����ͼ��

������ʽ��6���������²�����

����ĺ�����estimator.cpp�ļ��е�Estimator::processImage()�����е��ã���Step2�оͻ������γ�ʼ������initial_ex_rotation.CalibrationExRotation()����������ι��ƣ��õ������calib_ric���������£�
// �궨imu�����֮�����ת��Σ�ͨ��imu��ͼ��������תʹ�����۱궨������
bool InitialEXRotation::CalibrationExRotation(vector<pair<Vector3d, Vector3d>> corres, Quaterniond delta_q_imu, Matrix3d &calib_ric_result)
{frame_count ++;// �����������������������֡�������תR12Rc.push_back(solveRelativeR(corres));Rimu.push_back(delta_q_imu.toRotationMatrix());// ͨ����ΰ�imu����תת�Ƶ��������ϵRc_g.push_back(ric.inverse() * delta_q_imu * ric); // ric����һ�����õ������Eigen::MatrixXd A(frame_count * 4, 4);A.setZero();int sum_ok = 0;for (int i = 1; i <= frame_count; i++){Quaterniond r1(Rc[i]);Quaterniond r2(Rc_g[i]);// �Ƕ����r_k+1^k�����ں����³����Ȩ�����double angular_distance = 180 / M_PI * r1.angularDistance(r2);ROS_DEBUG("%d %f", i, angular_distance);// һ���ĺ˺�����ʽ��8����w�����double huber = angular_distance > 5.0 ? 5.0 / angular_distance : 1.0;++ sum_ok;Matrix4d L, R;double w = Quaterniond(Rc[i]).w();Vector3d q = Quaterniond(Rc[i]).vec();L.block<3, 3>(0, 0) = w * Matrix3d::Identity() + Utility::skewSymmetric(q);L.block<3, 1>(0, 3) = q;L.block<1, 3>(3, 0) = -q.transpose();L(3, 3) = w;Quaterniond R_ij(Rimu[i]);w = R_ij.w();q = R_ij.vec();R.block<3, 3>(0, 0) = w * Matrix3d::Identity() - Utility::skewSymmetric(q);R.block<3, 1>(0, 3) = q;R.block<1, 3>(3, 0) = -q.transpose();R(3, 3) = w;// ��ʽ��7��A.block<4, 4>((i - 1) * 4, 0) = huber * (L - R); // �����ڲв�����}// �Թ�ʽ��7������SVD�ֽ�JacobiSVD<MatrixXd> svd(A, ComputeFullU | ComputeFullV);Matrix<double, 4, 1> x = svd.matrixV().col(3);Quaterniond estimated_R(x); // �������Matrix��ʼ����Ԫ��ric = estimated_R.toRotationMatrix().inverse();// cout << svd.singularValues().transpose() << endl;// cout << ric << endl;Vector3d ric_cov;ric_cov = svd.singularValues().tail<3>();// �����ڶ�������ֵ����Ϊ��ת��3�����ɶȣ���˼��һ�µ���С������ֵ�Ƿ��㹻��ͨ����Ҫ�㹻���˶��������ܱ�֤�õ�û������Ľ�if (frame_count >= WINDOW_SIZE && ric_cov(1) > 0.25){calib_ric_result = ric;return true;}elsereturn false;
}����֪ʶ��ΪʲôҪȡ��4��������Ϊ�����

2��������תԼ������������bias
ʣ�µ�����������ʵ�ʶ���visualInitialAlign()�����У�

�μ���д�ñȽϼ�࣬�ܶ���̶�ʡ���ˣ��������ʱ���������������ף��������https://blog.csdn.net/jiweinanyi/article/details/99882311������������������biasУ�����̣�
���ڴ����е�������֡��
���Ѿ����Ӿ�SFM�еõ�����ת
��
����Ԥ�����еõ���������֡��ת
![]() ������Լ�����̣�������������֡��С���ۺ�����
������Լ�����̣�������������֡��С���ۺ�����

���У���������ƫ����IMUԤ���������Ի����У�

�ھ���ʵ�ֵ�ʱ������Լ������Ϊ��

�У�
![]()
������һ��չ��ʽ���У�

ֻ�����鲿���У�
![]()
�������![]() ����LDLT�ֽ���æ�bw?��
����LDLT�ֽ���æ�bw?��

Ȼ����LDLT�ֽ����ƫ�æ�bw?���������£�
void solveGyroscopeBias(map<double, ImageFrame> &all_image_frame, Vector3d* Bgs)
{Matrix3d A;Vector3d b;Vector3d delta_bg;A.setZero();b.setZero();map<double, ImageFrame>::iterator frame_i;map<double, ImageFrame>::iterator frame_j;for (frame_i = all_image_frame.begin(); next(frame_i) != all_image_frame.end(); frame_i++){frame_j = next(frame_i); // �ҵ���һ֡MatrixXd tmp_A(3, 3); // H = J^T*Jtmp_A.setZero();VectorXd tmp_b(3); // rtmp_b.setZero();//R_ij = (R^c0_bk)^-1 * (R^c0_bk+1) ת��Ϊ��Ԫ�� q_ij = (q^c0_bk)^-1 * (q^c0_bk+1)Eigen::Quaterniond q_ij(frame_i->second.R.transpose() * frame_j->second.R);//tmp_A = J_j_bwtmp_A = frame_j->second.pre_integration->jacobian.template block<3, 3>(O_R, O_BG);//tmp_b = 2 * ((r^bk_bk+1)^-1 * (q^c0_bk)^-1 * (q^c0_bk+1))_vec// = 2 * ((r^bk_bk+1)^-1 * q_ij)_vectmp_b = 2 * (frame_j->second.pre_integration->delta_q.inverse() * q_ij).vec();//tmp_A * delta_bg = tmp_bA += tmp_A.transpose() * tmp_A;b += tmp_A.transpose() * tmp_b;}delta_bg = A.ldlt().solve(b); // ���������bias�IJ�ֵROS_WARN_STREAM("gyroscope bias initial calibration " << delta_bg.transpose());// �����е���ƫ����Ϊ����������ƫfor (int i = 0; i <= WINDOW_SIZE; i ++)Bgs[i] += delta_bg;// ��all_image_frame��Ԥ���������ݵ�ǰ��ƫ���»���for (frame_i = all_image_frame.begin(); next(frame_i) != all_image_frame.end( ); frame_i++){frame_j = next(frame_i);frame_j->second.pre_integration->repropagate(Vector3d::Zero(), Bgs[0]);}
}3������ƽ��Լ�������������ٶȣ��Լ��߶�����s



���ݴ��Ż������������������̣�ת����Hx=b����ʽ���У�
![]()
ת���ɾ�����ʽ��

ͬ���У�

���õ���

Ҳ���ǣ�

��������LinearAlignment()������
bool LinearAlignment(map<double, ImageFrame> &all_image_frame, Vector3d &g, VectorXd& x)
{// ��һ�������ݶ������Ľ�������// �����ǡ�VIO ��7���� ���� �Ӿ���IMU����������̵�3��������ƽ��Լ�������������ٶ��Լ��߶ȳ�ʼֵint all_frame_count = all_image_frame.size();int n_state = all_frame_count * 3 + 3 + 1; // �ٶ� + ���� + �߶�����MatrixXd A{n_state, n_state};A.setZero();VectorXd b{n_state};b.setZero();map<double, ImageFrame>::iterator frame_i;map<double, ImageFrame>::iterator frame_j;int i = 0;for (frame_i = all_image_frame.begin(); next(frame_i) != all_image_frame.end(); frame_i ++, i ++){frame_j = next(frame_i);MatrixXd tmp_A(6, 10);tmp_A.setZero();VectorXd tmp_b(6);tmp_b.setZero();double dt = frame_j->second.pre_integration->sum_dt;// ��VIO��7��������ʽ��17��tmp_A.block<3, 3>(0, 0) = -dt * Matrix3d::Identity();tmp_A.block<3, 3>(0, 6) = frame_i->second.R.transpose() * dt * dt / 2 * Matrix3d::Identity();tmp_A.block<3, 1>(0, 9) = frame_i->second.R.transpose() * (frame_j->second.T - frame_i->second.T) / 100.0; tmp_b.block<3, 1>(0, 0) = frame_j->second.pre_integration->delta_p + frame_i->second.R.transpose() * frame_j->second.R * TIC[0] - TIC[0];// cout << "delta_p " << frame_j->second.pre_integration->delta_p.transpose() << endl;tmp_A.block<3, 3>(3, 0) = -Matrix3d::Identity();tmp_A.block<3, 3>(3, 3) = frame_i->second.R.transpose() * frame_j->second.R;tmp_A.block<3, 3>(3, 6) = frame_i->second.R.transpose() * dt * Matrix3d::Identity();tmp_b.block<3, 1>(3, 0) = frame_j->second.pre_integration->delta_v;// cout << "delta_v " << frame_j->second.pre_integration->delta_v.transpose() << endl;Matrix<double, 6, 6> cov_inv = Matrix<double, 6, 6>::Zero();// cov.block<6, 6>(0, 0) = IMU_cov[i + 1];// MatrixXd cov_inv = cov.inverse();cov_inv.setIdentity();MatrixXd r_A = tmp_A.transpose() * cov_inv * tmp_A;VectorXd r_b = tmp_A.transpose() * cov_inv * tmp_b;A.block<6, 6>(i * 3, i * 3) += r_A.topLeftCorner<6, 6>();b.segment<6>(i * 3) += r_b.head<6>();A.bottomRightCorner<4, 4>() += r_A.bottomRightCorner<4, 4>();b.tail<4>() += r_b.tail<4>();A.block<6, 4>(i * 3, n_state - 4) += r_A.topRightCorner<6, 4>();A.block<4, 6>(n_state - 4, i * 3) += r_A.bottomLeftCorner<4, 6>();}// ��ǿ��ֵ�ȶ���A = A * 1000.0;b = b * 1000.0;x = A.ldlt().solve(b); // ע���������ⷽʽ��ldlt�ֽ�double s = x(n_state - 1) / 100.0; // ȡ���߶�ROS_DEBUG("estimated scale: %f", s);g = x.segment<3>(n_state - 4); // ȡ���������ӵ�����4��λ�ã�ȡһ��vector3d���������ð�����ȡ����ROS_DEBUG_STREAM(" result g " << g.norm() << " " << g.transpose());// ��һЩ���if(fabs(g.norm() - G.norm()) > 1.0 || s < 0){return false;}// ����������VIO��7���� ���� �Ӿ���IMU���������е�4��������������g_c0�����Ż�RefineGravity(all_image_frame, g, x);// �õ���ʵ�߶�s = (x.tail<1>())(0) / 100.0;(x.tail<1>())(0) = s;ROS_DEBUG_STREAM(" refine " << g.norm() << " " << g.transpose());if(s < 0.0 )return false; elsereturn true;
}4���Ż���������???????
�������⣺1��Ϊʲô��Ҫ�Ż�����������2������Ż�����������
���ǵ���һ����õ�g������һ����Ϊ����ʸ����ģ������֪�ģ��������ֻʣ���������ɶȣ������߿ռ����������������²�����������


������initial_alignment.cpp�ļ��е�RefineGravity()�����У��������£�
void RefineGravity(map<double, ImageFrame>& all_image_frame, Vector3d& g, VectorXd& x)
{// �ο�����Vector3d g0 = g.normalized() * G.norm();Vector3d lx, ly;//VectorXd x;int all_frame_count = all_image_frame.size();int n_state = all_frame_count * 3 + 2 + 1;MatrixXd A{n_state, n_state};A.setZero();VectorXd b{n_state};b.setZero();map<double, ImageFrame>::iterator frame_i;map<double, ImageFrame>::iterator frame_j;for(int k = 0; k < 4; k ++){MatrixXd lxly(3, 2);lxly = TangentBasis(g0); // // ���������Ż�������������������,������b1 b2�������У��γɵ�3��2����int i = 0;for (frame_i = all_image_frame.begin(); next(frame_i) != all_image_frame.end(); frame_i++, i++){frame_j = next(frame_i);MatrixXd tmp_A(6, 9);tmp_A.setZero();VectorXd tmp_b(6);tmp_b.setZero();double dt = frame_j->second.pre_integration->sum_dt;// ���ǹ�ʽ��17��,ֻ�����Ż������� g^c0 ��Ϊ w^c0 ����ʽ21��ת����tmp_A.block<3, 3>(0, 0) = -dt * Matrix3d::Identity();tmp_A.block<3, 2>(0, 6) = frame_i->second.R.transpose() * dt * dt / 2 * Matrix3d::Identity() * lxly; // ���һ����[b1 b2]��ע���Ż�����w����Ҫ�����w������Ҳ����b1��b2�IJ��� ��tmp_A.block<3, 1>(0, 8) = frame_i->second.R.transpose() * (frame_j->second.T - frame_i->second.T) / 100.0; tmp_b.block<3, 1>(0, 0) = frame_j->second.pre_integration->delta_p + frame_i->second.R.transpose() * frame_j->second.R * TIC[0] - TIC[0] - frame_i->second.R.transpose() * dt * dt / 2 * g0; // ��ʽ��22���ϰ벿��tmp_A.block<3, 3>(3, 0) = -Matrix3d::Identity();tmp_A.block<3, 3>(3, 3) = frame_i->second.R.transpose() * frame_j->second.R;tmp_A.block<3, 2>(3, 6) = frame_i->second.R.transpose() * dt * Matrix3d::Identity() * lxly;tmp_b.block<3, 1>(3, 0) = frame_j->second.pre_integration->delta_v - frame_i->second.R.transpose() * dt * Matrix3d::Identity() * g0; // ��ʽ��22���°벿��Matrix<double, 6, 6> cov_inv = Matrix<double, 6, 6>::Zero();//cov.block<6, 6>(0, 0) = IMU_cov[i + 1];//MatrixXd cov_inv = cov.inverse();cov_inv.setIdentity();MatrixXd r_A = tmp_A.transpose() * cov_inv * tmp_A;VectorXd r_b = tmp_A.transpose() * cov_inv * tmp_b;A.block<6, 6>(i * 3, i * 3) += r_A.topLeftCorner<6, 6>();b.segment<6>(i * 3) += r_b.head<6>();A.bottomRightCorner<3, 3>() += r_A.bottomRightCorner<3, 3>();b.tail<3>() += r_b.tail<3>();A.block<6, 3>(i * 3, n_state - 3) += r_A.topRightCorner<6, 3>();A.block<3, 6>(n_state - 3, i * 3) += r_A.bottomLeftCorner<3, 6>();}A = A * 1000.0;b = b * 1000.0;x = A.ldlt().solve(b);VectorXd dg = x.segment<2>(n_state - 3); // ���Ƶ�w������Ҳ����[b1 b2]��ϵ��g0 = (g0 + lxly * dg).normalized() * G.norm();//double s = x(n_state - 1);} g = g0;
}5�������������ϵw�ͳ�ʼ�������ϵc0֮�����ת����q_wc0�������켣���뵽��������ϵ��


���ﻹ������https://blog.csdn.net/jiweinanyi/article/details/99882311�еij�ʼ��˼·��
1������IJ����Ѿ�������תԼ�������������bias bg������ƽ��Լ�������gc0��s����IMU����ϵ�µ��ٶ�Vs��
bool result = VisualIMUAlignment(all_image_frame, Bgs, g, x);if(!result){ROS_DEBUG("solve g failed!");return false;}
2����ȡ����ͼ��֡��frame_count�����ĵ�λ��Ps��Rs����������Ϊ�ؼ�֡��
for (int i = 0; i <= frame_count; i++){Matrix3d Ri = all_image_frame[Headers[i].stamp.toSec()].R;Vector3d Pi = all_image_frame[Headers[i].stamp.toSec()].T;Ps[i] = Pi;Rs[i] = Ri;all_image_frame[Headers[i].stamp.toSec()].is_key_frame = true;}
3���������ǻ����¼�������������Ĵ��߶�ģ������ȡ�
//������������������Ϊ-1VectorXd dep = f_manager.getDepthVector();for (int i = 0; i < dep.size(); i++)dep[i] = -1;f_manager.clearDepth(dep);//���¼�������������Vector3d TIC_TMP[NUM_OF_CAM];for(int i = 0; i < NUM_OF_CAM; i++)TIC_TMP[i].setZero();ric[0] = RIC[0];f_manager.setRic(ric);f_manager.triangulate(Ps, &(TIC_TMP[0]), &(RIC[0]));
4���Ż��������ǵ�ƫ��bg�ı䣬���½���Ԥ���֡�
for (int i = 0; i <= WINDOW_SIZE; i++){pre_integrations[i]->repropagate(Vector3d::Zero(), Bgs[i]);}
5����Ps��Vs��depth�߶�s���ź�ת��Ϊ����ڵ�0֡ͼ������ϵ���������ᵽ���Ե�һ֡c0Ϊ������ϵ��ͨ���������ϵckλ�˵õ�IMU����ϵbkλ�˵Ĺ�ʽΪ��

֮ǰ�Ӿ�SFM�Ľ�������Ե�l֡Ϊ�ؼ���Ŧ֡���Ե�l֡Ϊ������ϵ����ת������һ֡b0Ϊ������ϵ�Ļ�Ӧ���ǣ�
![]()
for (int i = frame_count; i >= 0; i--)Ps[i] = s * Ps[i] - Rs[i] * TIC[0] - (s * Ps[0] - Rs[0] * TIC[0]); 6��ͨ���Ż���������õ�֡�ٶ�Vs�ͳ߶�s��ȥ�����ֵ�ij߶�ģ����
int kv = -1;map<double, ImageFrame>::iterator frame_i;for (frame_i = all_image_frame.begin(); frame_i != all_image_frame.end(); frame_i++){if(frame_i->second.is_key_frame){kv++;Vs[kv] = frame_i->second.R * x.segment<3>(kv * 3);}}for (auto &it_per_id : f_manager.feature){it_per_id.used_num = it_per_id.feature_per_frame.size();if (!(it_per_id.used_num >= 2 && it_per_id.start_frame < WINDOW_SIZE - 2))continue;it_per_id.estimated_depth *= s;}7��ͨ����������ת��z���ϣ��õ���������ϵw���������ϵc0֮�����ת����rot_diff��

Matrix3d R0 = Utility::g2R(g); // �ȵõ�udouble yaw = Utility::R2ypr(R0 * Rs[0]).x(); // �ٵõ���R0 = Utility::ypr2R(Eigen::Vector3d{-yaw, 0, 0}) * R0; // R_wcg = R0 * g; // �������gc0ת������������ϵ��Matrix3d rot_diff = R0;
8�����б����Ӳο�����ϵc0ת������������ϵw��
// Matrix3d rot_diff = R0 * Rs[0].transpose();Matrix3d rot_diff = R0;for (int i = 0; i <= frame_count; i ++){Ps[i] = rot_diff * Ps[i];Rs[i] = rot_diff * Rs[i]; // ȫ�����뵽�����£�ͬʱyaw�Ƕ��뵽��һ֡ R_w_ci = R_w_c0 * R_c0_ciVs[i] = rot_diff * Vs[i];}