作者:RayChiu_Labloy
版权声明:著作权归作者所有,商业转载请联系作者获得授权,非商业转载请注明出处
目录
2D图像变换包括:
仿射变换和透视变换区别:
仿射变换:
使用场景:
原理:
平移、旋转、缩放和翻转等对应的仿射变换矩阵:
平移:
旋转:
翻转:
缩放:
刚体变换:
相似变换:
总结:
相关函数:
C++ 实现:
透视(投影)变换:
使用场景:
原理:
相关函数:
C++实现:
python实现仿射变换和透视变换:

2D图像变换包括:
- 基于2×3矩阵的仿射变换
- 基于3×3矩阵透视变换
仿射变换和透视变换区别:
仿射变换后平行四边形的各边仍操持平行,透视变换结果允许是梯形等四边形,所以仿射变换是透视变换的子集
仿射变换:
使用场景:
- 平移
- 旋转
- 缩放
- 错切(类似矩形变平行四边形)
- 翻转
原理:
其实就是二维坐标的变换:从一种二维坐标(x,y)到另一种二维坐标(u,v)的线性变换:

如果写成矩阵的形式,就是:
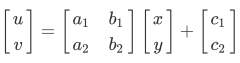
任意的仿射变换都能表示为乘以一个矩阵(线性变换),再加上一个向量 (平移) 的形式.
我们作如下定义:


平移、旋转、缩放和翻转等对应的仿射变换矩阵:
平移:

平移就是x和y方向上的直接移动,可以上下 ty /左右 tx 移动,自由度为2,变换矩阵可以表示为:

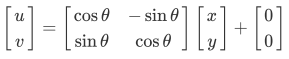
旋转:

旋转是坐标轴方向饶原点旋转一定的角度θ,自由度为1,不包含平移,如顺时针旋转可以表示为:
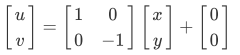
翻转:
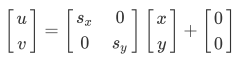
缩放:

刚体变换:
就是平移、旋转和翻转的组合,图像变换前后两点间的距离仍然保持不变,自由度为3(夹角、tx、ty)。变换矩阵可以表示为:

相似变换:
就是刚体变换的基础上加了缩放,所以并不会保持欧氏距离不变,但直线间的夹角依然不变。自由度为4(缩放比例、旋转角度、x和y向平移量)。若缩放比例为scale,旋转角度为θ,旋转中心是$ (center_x,center_y) $,则仿射变换可以表示为:

其中:
![]()
总结:

相关函数:
cvWrapAffine(src,dst,mat)
C++ 实现:
//仿射变换―平移,旋转,缩放,翻转,错切#include "stdafx.h"
#include<opencv2/opencv.hpp>
#include<iostream>
#include<math.h>using namespace cv;
using namespace std;int main(int argc, char* argv) {Mat src, dst;src = imread("C:/Users/59235/Desktop/image/girl5.jpg");if (!src.data) {printf("could not load image...\n");return -1;}namedWindow("original image", CV_WINDOW_AUTOSIZE);imshow("original image", src);Mat dst_warp, dst_warpRotateScale, dst_warpTransformation, dst_warpFlip;Point2f srcPoints[3];//原图中的三点 ,一个包含三维点(x,y)的数组,其中x、y是浮点型数Point2f dstPoints[3];//目标图中的三点 //第一种仿射变换的调用方式:三点法//三个点对的值,上面也说了,只要知道你想要变换后图的三个点的坐标,就可以实现仿射变换 srcPoints[0] = Point2f(0, 0);srcPoints[1] = Point2f(0, src.rows);srcPoints[2] = Point2f(src.cols, 0);//映射后的三个坐标值dstPoints[0] = Point2f(0, src.rows*0.3);dstPoints[1] = Point2f(src.cols*0.25, src.rows*0.75);dstPoints[2] = Point2f(src.cols*0.75, src.rows*0.25);Mat M1 = getAffineTransform(srcPoints, dstPoints);//由三个点对计算变换矩阵 warpAffine(src, dst_warp, M1, src.size());//仿射变换 //第二种仿射变换的调用方式:直接指定角度和比例 //旋转加缩放 Point2f center(src.cols / 2, src.rows / 2);//旋转中心 double angle = 45;//逆时针旋转45度 double scale = 0.5;//缩放比例 Mat M2 = getRotationMatrix2D(center, angle, scale);//计算旋转加缩放的变换矩阵 warpAffine(src, dst_warpRotateScale, M2, Size(src.cols, src.rows), INTER_LINEAR);//仿射变换//仿射变换―平移Point2f srcPoints1[3];Point2f dstPoints1[3];srcPoints1[0] = Point2i(0, 0);srcPoints1[1] = Point2i(0, src.rows);srcPoints1[2] = Point2i(src.cols, 0);dstPoints1[0] = Point2i(src.cols / 3, 0);dstPoints1[1] = Point2i(src.cols / 3, src.rows);dstPoints1[2] = Point2i(src.cols + src.cols / 3, 0);Mat M3 = getAffineTransform(srcPoints1, dstPoints1);warpAffine(src, dst_warpTransformation, M3, Size(src.cols + src.cols / 3, src.rows));//仿射变换―翻转、镜像Point2f srcPoints2[3];Point2f dstPoints2[3];srcPoints2[0] = Point2i(0, 0);srcPoints2[1] = Point2i(0, src.rows);srcPoints2[2] = Point2i(src.cols, 0);dstPoints2[0] = Point2i(src.cols, 0);dstPoints2[1] = Point2i(src.cols, src.rows);dstPoints2[2] = Point2i(0, 0);Mat M4 = getAffineTransform(srcPoints2, dstPoints2);warpAffine(src, dst_warpFlip, M4, Size(src.cols, src.rows));//flip(src, dst_warpFlip, 1);// flipCode:= 0 图像向下翻转//> 0 图像向右翻转//< 0 图像同时向下向右翻转imshow("affine transformation1(三点法)", dst_warp);imshow("affine transfoemation2(指定比例和角度)", dst_warpRotateScale);imshow("affine transfoemation3(仿射变换平移)", dst_warpTransformation);imshow("affine transformation4(仿射变换镜像)", dst_warpFlip);waitKey(0);return 0;
}透视(投影)变换:
使用场景:
将2D矩阵图像变换成3D的空间显示效果,全景拼接 。
原理:
前面仿射变换后依然是平行四边形,并不能做到任意的变换。

透视变换(Perspective Transformation)是将二维的图片投影到一个三维视平面上,然后再转换到二维坐标下,所以也称为投影映射(Projective Mapping)。简单来说就是 二维(x,y) →三维(X,Y,Z)→二维(x’,y’) 的一个过程。

齐次矩阵的形式:
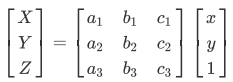
其中a1、b1、a2、b2表示线性变换,a3、b3产生透视变换,c1、c2、c3是平移变换。
接下来再通过除以Z轴转换成二维坐标:
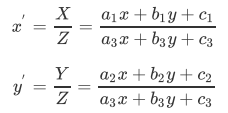
透视变换相比仿射变换更加灵活,变换后会产生一个新的四边形,但不一定是平行四边形,所以需要非共线的四个点才能唯一确定,原图中的直线变换后依然是直线。因为四边形包括了所有的平行四边形,所以透视变换包括了所有的仿射变换。
相关函数:
cvWrapPerspective(src,dst,mat)
C++实现:
#include <iostream>
#include <opencv.hpp>
using namespace std;
using namespace cv;Mat PerspectiveTrans(Mat src, Point2f* scrPoints, Point2f* dstPoints)
{Mat dst;Mat Trans = getPerspectiveTransform(scrPoints, dstPoints);warpPerspective(src, dst, Trans, Size(src.cols, src.rows), CV_INTER_CUBIC);return dst;
}void main()
{Mat I = imread("1.jpg"); //700*438Point2f AffinePoints0[4] = { Point2f(100, 50), Point2f(100, 390), Point2f(600, 50), Point2f(600, 390) };Point2f AffinePoints1[4] = { Point2f(200, 100), Point2f(200, 330), Point2f(500, 50), Point2f(600, 390) };Mat dst_perspective = PerspectiveTrans(I, AffinePoints0, AffinePoints1);for (int i = 0; i < 4; i++){circle(I, AffinePoints0[i], 2, Scalar(0, 0, 255), 2);circle(dst_perspective, AffinePoints1[i], 2, Scalar(0, 0, 255), 2);}imshow("origin", I);imshow("perspective", dst_perspective);waitKey();
}效果:

python实现仿射变换和透视变换:
请看我的另外一篇文章:opencv-python 实现仿射变换和透视变换_RayChiu757374816的博客-CSDN博客
【如果对您有帮助,交个朋友给个一键三连吧,您的肯定是我博客高质量维护的动力!!!】