БОЮФМЧТМСЫORB-SLAMдкUbuntu14.04ЯТЕФАВзАЙ§ГЬ.
АВзАЛЗОГЃК
- Trusty (Ubuntu 14.04) amd64
- ROS Indigo Igloo
- ORB-SLAM
ЮФеТФПТМ
-
- 1 зМБИЙЄзї
- 2 ROS Indigo Igloo ЕФАВзАКЭХфжУ
-
- 2.1 ХфжУUbuntuШэМўжааФ
- 2.2 ЩшжУsources.listЃЈШэМўдДЃЉ
- 2.3 ЩшжУЕФУмдП
- 2.4 АВзА
- 2.5 ГѕЪМЛЏ rosdep
- 2.6 ЩшжУЛЗОГ
- 2.7 АВзА rosinstall
- 2.8 ВтЪд ROS
- 2.9 ДДНЈ ROS ЙЄзїПеМф
- 3 ORB-SLAMвРРЕЯюЕФАВзА
-
- 3.1 Boost
- 3.2 OpenCV
- 3.3 Eigen3
- 4 БрвыАВзА ORB-SLAM
-
- 4.1 ЯТди ORB-SLAM дДТы
- 4.2 ЩшжУЛЗОГБфСП
- 4.3 Брвыg2o
- 4.4 БрвыDBoW2
- 4.5 БрвыORB-SLAMЯюФП
- 5 дЫаа ORB-SLAM
-
- 5.1 зМБИВтЪдЪ§Он
- 5.2 дЫаа ORB-SLAM
1 зМБИЙЄзї
ЪзЯШЃЌАВзАШєИЩБиБИЙЄОпЃК
sudo apt-get install vim git cmake -y
НгЯТРДНЋАВзА ROS Indigo Igloo
2 ROS Indigo Igloo ЕФАВзАКЭХфжУ
ЯТУцЮвНЋИјГі ROS Indigo Igloo дк Trusty (Ubuntu 14.04) ЩЯЕФАВзАКЭВтЪдЙ§ГЬЁЃ
ЕуЛїетРяЃЌВщПД ROS ЙйЭјЕФ ROS Indigo Igloo АВзАЪжВсЁЃ
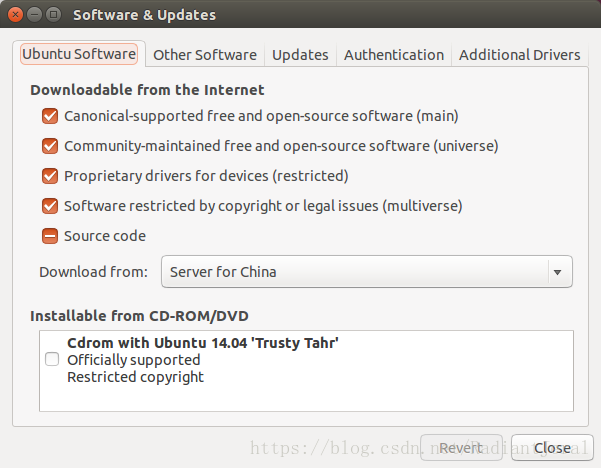
2.1 ХфжУUbuntuШэМўжааФ
ХфжУUbuntuвЊЧѓдЪаэНгЪм"restrictedЃЌuniverse КЭ multiverse. ЕФШэМўдД,ПЩвдИљОнЯТУцЕФСДНгХфжУ:
https://help.ubuntu.com/community/Repositories/Ubuntu
вЛАуЕиЃЌетЪЧЯЕЭГФЌШЯЩшжУЃЌШчЯТЭМЫљЪОЃК
ROS Indigo ONLY supports Saucy (Ubuntu13.10) and Trusty (Ubuntu14.04) for debian packages.
2.2 ЩшжУsources.listЃЈШэМўдДЃЉ
ЩшжУФуЕФМЦЫуЛњДгpackages.ros.orgНгЪеШэМўАќЁЃ
ЬэМгROSЙйЗНШэМўдДЃК
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
вЛАуЕиЃЌROSЙйЗНдДЫйЖШКмТ§ЛђепСЌНгВЛЩЯЃЌЭЦМіЪЙгУЧхЛЊ TUNA Mirror ЁЃ
ЩшжУЧхЛЊДѓбЇTUNAдД:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
Ыљга Mirrors.
2.3 ЩшжУЕФУмдП
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
ШчЙћФудкСЌНгУидПЗўЮёЦїЪБгіЕНЮЪЬтЃЌФуПЩвддкЩЯУцЕФУќСюжаЬцЛЛСДНгЮЊhkp://pgp.mit.edu:80Лђепhkp://keyserver.ubuntu.com:80
2.4 АВзА
ЪзЯШЃЌИќаТDebianАќЫїв§
sudo apt-get update
If you are using Ubuntu Trusty 14.04.2 and experience dependency issues during the ROS installation, you may have to install some additional system dependencies.
Do not install these packages if you are using 14.04, it will destroy your X server:sudo apt-get install xserver-xorg-dev-lts-trusty mesa-common-dev-lts-trusty libxatracker-dev-lts-trusty libopenvg1-mesa-dev-lts-trusty libgles2-mesa-dev-lts-trusty libgles1-mesa-dev-lts-trusty libgl1-mesa-dev-lts-trusty libgbm-dev-lts-trusty libegl1-mesa-dev-lts-trustyDo not install the above packages if you are using 14.04, it will destroy your X server
Alternatively, try installing just this to fix dependency issues:sudo apt-get install libgl1-mesa-dev-lts-trusty
For more information on this issue see this answers.ros.org thread or this launchpad issue
X server is an application that manages one or more graphics displays and one or more input devices (keyboard, mouse, etc.) connected to the computer.
It works as a server and can run on the local computer or on another computer on the network. Services can communicate with the X server to display graphical interfaces and receive input from the user.
ItЁЏs worth noting, a common component used with an X server is the Window Manager, an application that manages the resizing and moving of windows and decorative elements of windows such as title bars, minimize, and close buttons.
The X server can be started with the ЁЎstartxЁЏ command, or more commonly, from a display manager such as gdm.
- ~/.xinitrc is a shell script used by xinit, that starts the X server when not using a display manager, to define some application to start automatically in the X server.
- /etc/X11/xorg.conf is a configuration file used to give the X server information about the hardware components used, but now the X server can avoid using it, because it is capable of autoconfiguring itself.
-дкАВзАжЎЧАЃЌЧыШЯецдФЖСЩЯЪів§гУЁЃАВзАROSЭъећАцКѓПЩФмЛсЕМжТ X server Ы№ЛЕЃЌдкжиаТЦєЖЏUbuntuКѓГіЯжThe system is running in low-graphics modeЕФДэЮѓЃЌЕМжТЮоЗЈНјШыUbuntuзРУцЁЃЧыГЂЪдЕуЛї answers.ros.org thread Лђеп launchpad issue НтОіЮЪЬтЁЃ
ROSКЌгаЖржжПтКЭЙЄОпЁЃЙйЭјЬсЙЉСЫ4жжФЌШЯХфжУЕФАВзАЙЉФубЁдёЁЃФувВПЩвдвРОнздМКашЧѓНјааИіадЛЏАВзАЁЃ
- (1) зРУцЭъећАц
Desktop-Full Install: (Recommended) : ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators and 2D/3D perception
Indigo uses Gazebo 2 which is the default version of Gazebo on Trusty and is recommended. If you would like to instead use a newer version of Gazebo (5, 6 or 7), refer to these instructions on the Gazebo site. Note that installing a newer version of Gazebo will require you to build dependent packages (such as turtlebot_gazebo) to be built from source. See also Using a specific Gazebo version with ROS.
sudo apt-get install ros-indigo-desktop-full
- (2) зРУцАц
Desktop Install: ROS, rqt, rviz, and robot-generic libraries
sudo apt-get install ros-indigo-desktop
- (3) ЛљДЁАц
ROS-Base: (Bare Bones) ROS package, build, and communication libraries. No GUI tools.
sudo apt-get install ros-indigo-ros-base
- (4) ИіадЛЏАВзА
Individual Package: You can also install a specific ROS package (replace underscores with dashes of the package name):
sudo apt-get install ros-indigo-PACKAGE
PACKAGEжИАќЕФУћГЦ
e.g.
sudo apt-get install ros-indigo-slam-gmapping
ЫбЫїПЩгУАќ:
apt-cache search ros-indigo
ЮвУЧЪЙгУ Desktop-Full Install
sudo apt-get install ros-indigo-desktop-full
2.5 ГѕЪМЛЏ rosdep
дкЪЙгУROSжЎЧАЃЌЮвУЧашвЊЪзЯШГѕЪМЛЏrosdepЃЌrosdepАяжњФуЧсЫЩЕиНјааЯЕЭГвРРЕЯюдДТыЕФБрвыКЭАВзАЃЌВЂЧвЫќЪЧROSКЫаФзщМўдЫааЕФБивЊГЩЗжЁЃ
sudo rosdep init
rosdepГѕЪМЛЏКѓШчЯТЭМЃЌаДШы/etc/ros/rosdep/sources.list.d/20-default.listЁЃ
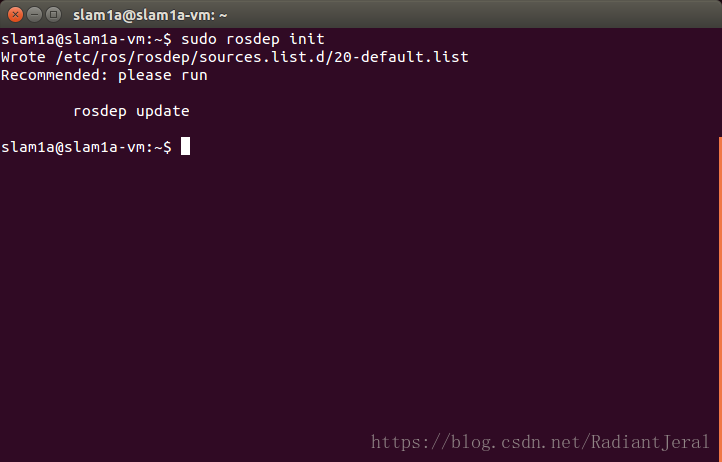
ИќаТROSШэМўАќ
rosdep update
2.6 ЩшжУЛЗОГ
ЪЙгУapt-getЗНЪНдк UbuntuЩЯАВзА ROSЃЌдкЪЙгУЧАашвЊМЄЛю/opt/ros/indigo/ФПТМЯТЕФsetup.bashЮФМўРДЬэМг ROS ЛЗОГБфСПЁЃ
ЮвУЧАВзАЕФЪЧROS Indigo IglooЃЌУќСюШчЯТ:
source /opt/ros/indigo/setup.bash
дкУПДЮДђПЊвЛИіаТЕФ shell ЪБЃЌЮвУЧЖМашвЊЪЙгУЩЯЪіУќСюМЄЛюsetup.bashЮФМўЁЃетбљКмЗБЫіЁЃ
вђДЫЃЌПЩвдЬэМг ROS ЕФЛЗОГБфСПЃЌетбљЃЌЕБЮвУЧДђПЊаТЕФshellЪБ,ЮвУЧЕФbashЛсЛАжаЛсздЖЏЬэМгЛЗОГБфСПЁЃ
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrcsource ~/.bashrc #ЃЈЪЙЛЗОГБфСПЩшжУСЂМДЩњаЇЃЉ
Tips:
ЪЙгУЯТУцУќСюПЩвддкВЛЭЌЕФ ROS distribution ЃЈROS ЗЂааАцЃЉМфЧаЛЛ$ source /opt/ros/<distro>/setup.bashЪЙгУ ROS distribution ЕФЖЬУћГЦЬцЛЛ
<distro>
ШчЙћЮвУЧЯыЧаЛЛЕН ROS Kinetic Kame :$ source /opt/ros/kinetic/setup.bash
2.7 АВзА rosinstall
rosinstallЪЧ ROS АќжаГЃгУЕФУќСюааЙЄОпЁЃЫќПЩвдАяжњЮвУЧЧсЫЩЕиЯТдиаэЖр ROS АќдДТыВЂНЈСЂвРРЕЙиЯЕЃЌВЂЧвжЛашвЊвЛааУќСюЁЃ
sudo apt-get install python-rosinstall
ЦфЫћЕФГЃгУЯю
sudo apt-get install python-rosinstall-generator python-wstool -y
2.8 ВтЪд ROS
дЫаа roscore ЪЧЪЙгУ ROS ЕФЪзвЊВНжшЁЃ
roscore
ЮвУЧПЩвдПДЕН
... logging to ~/.ros/log/9cf88ce4-b14d-11df-8a75-00251148e8cf/roslaunch-machine_name-13039.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.started roslaunch server http://machine_name:33919/
ros_comm version 1.4.7SUMMARY
======PARAMETERS* /rosversion* /rosdistroNODESauto-starting new master
process[master]: started with pid [13054]
ROS_MASTER_URI=http://machine_name:11311/setting /run_id to 9cf88ce4-b14d-11df-8a75-00251148e8cf
process[rosout-1]: started with pid [13067]
started core service [/rosout]
ШчЭМЫљЪО
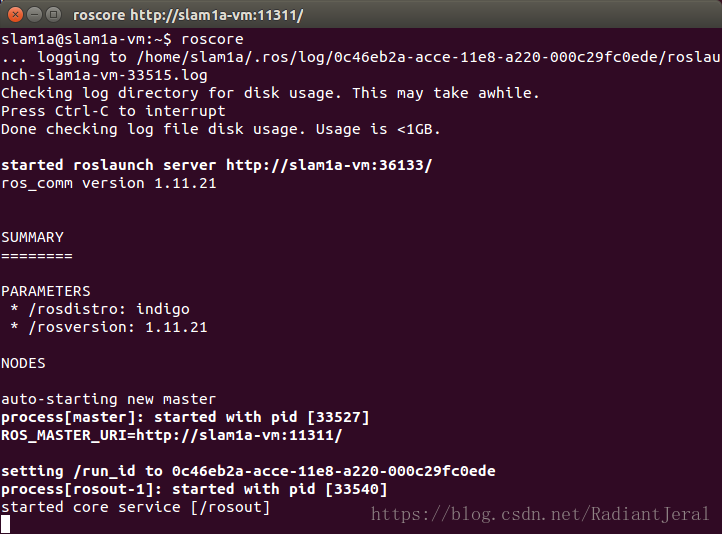
ЫЕУї ROS вбОГЩЙІАВзАВЂХфжУ
2.9 ДДНЈ ROS ЙЄзїПеМф
гаСНжжЗНЪНДДНЈ ROS ЙЄзїПеМфЃК
catkinКЭrosbuild
- ROS Groovy вдМАИќаТЕФАцБОЧыЪЙгУ
catkin- ROS Fuerte вдМАвдЧАЕФАцБОЧыЪЙгУ
rosbuild
ЮвУЧПЊЪМДДНЈ catkin workspaces
mkdir -p ~/catkin_ws/srccd ~/catkin_ws/catkin_make
The catkin_make command is a convenience tool for working with catkin workspaces. Running it the first time in your workspace, it will create a CMakeLists.txt link in your src folder. Additionally, if you look in your current directory you should now have a build and devel folder. Inside the devel folder you can see that there are now several setup.*sh files. Sourcing any of these files will overlay this workspace on top of your environment. To understand more about this see the general catkin documentation: catkin. Before continuing source your new setup.*sh file:
source devel/setup.bash
To make sure your workspace is properly overlayed by the setup script, make sure ROS_PACKAGE_PATH environment variable includes the directory youЁЏre in.
slam1a@slam1a-vm:~/catkin_ws$ echo $ROS_PACKAGE_PATH/home/slam1a/catkin_ws/src:/opt/ros/indigo/share:/opt/ros/indigo/stacks
ГіЯжЩЯЪіНсЙћЃЌЫЕУїЮвУЧЕФ catkin workspaces вбОДДНЈКУСЫЃЌВЂЧв ROS_PACKAGE_PATHвВвбОХфжУКУСЫЁЃ
НгЯТРДЕФЫљгаЙЄзїЖМдк
~/catkin_ws/srcФПТМЯТЭъГЩЃЌМДдкcatkin workspacesЁЃ
=======================================================
3 ORB-SLAMвРРЕЯюЕФАВзА
Г§СЫ ROS ЭтЃЌORB-SLAM ЛЙвРРЕгкЦфЫћШєИЩЕкШ§ЗНПтЃКBoostЁЂOpenCVЁЂEigen3ЁЂg2oКЭDBoW2ЁЃg2oКЭDBoW2 вбОАќКЌдк ORB-SLAM ЯюФПЯТЕФ Thirdparty/ ФПТМЯТЁЃ
ЯТУцЮвУЧНЋвРДЮАВзАЦфЫќИїЕкШ§ЗНПтЁЃ
3.1 Boost
ЪЙгУ Boost ЙмРэ ORB-SLAM ЖрЯпГЬЁЃ
sudo apt-get install libboost-all-dev
3.2 OpenCV
OpenCV АцБОзюЕЭвЊЧѓЮЊ2.4.3ЃЌНЈвщВЩгУ OpenCV 2.4.13 Лђеп OpenCV 3.2.0ЁЃ
ДгOpenCV ЙйЭј Лђеп OpenCV GitHub ЯТди OpenCV2.4.13ЁЃ
вВПЩвджБНгЕуЛїетРяЯТди
ШЛКѓАВзАвРРЕЯюЃК
АВзАБрвыЙЄОп
sudo apt-get install build-essential -y
АВзАвРРЕАќ
sudo apt-get install libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev -y
АВзАПЩбЁАќ
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev -ysudo apt-get install libgtk2.0-dev -ysudo apt-get install pkg-config -y
НјШы ~/catkin_ws/src
ДгGitHubЯТдиopencv2.4.13ЃЌетВЛЪЧвЛИі git repositoryЃЌЪЙгУwgetЁЃ
НЋЯТдиЕФOpenCVНтбЙ~/catkin_ws/srcФПТМЯТЁЃ
cd ~/catkin_ws/srcwget https://github.com/Itseez/opencv/archive/2.4.13.zipunzip 2.4.13.zip
НјШыOpenCVЕФФПТМЯТЁЃ
БрвыАВзАOpenCV 2.4.13 дДТыЁЃ
cd opencv-2.4.13/mkdir buildcd buildcmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local .. makesudo make install
АВзАЭъБЯЁЃ
ВщПДOpenCVАцБОЁЃ
pkg-config --modversion opencv
ЯТУцНјааВтЪдЁЃ
ВтЪдЪЕР§
//ЮФМўУћзжlena.cpp
#include <stdio.h>
#include <opencv2/opencv.hpp>
using namespace cv;int main( )
{
Mat image;//АДеездМКЕФФПТМЃЌЛђепНЋimage = imread("lena.png", 1 );if ( !image.data ){
printf("No image data \n");return -1;}namedWindow("Display Image", WINDOW_AUTOSIZE );imshow("Display Image", image);waitKey(0);return 0;
}

НЋЩЯЪі lena.cpp КЭ lena.png ЮФМўЗХШыЭЌвЛФПТМЯТЃЌБрвы
g++ lena.cpp -o lena.o `pkg-config --cflags --libs opencv`
дЫаа
./lena.o
аЇЙћШчЯТ
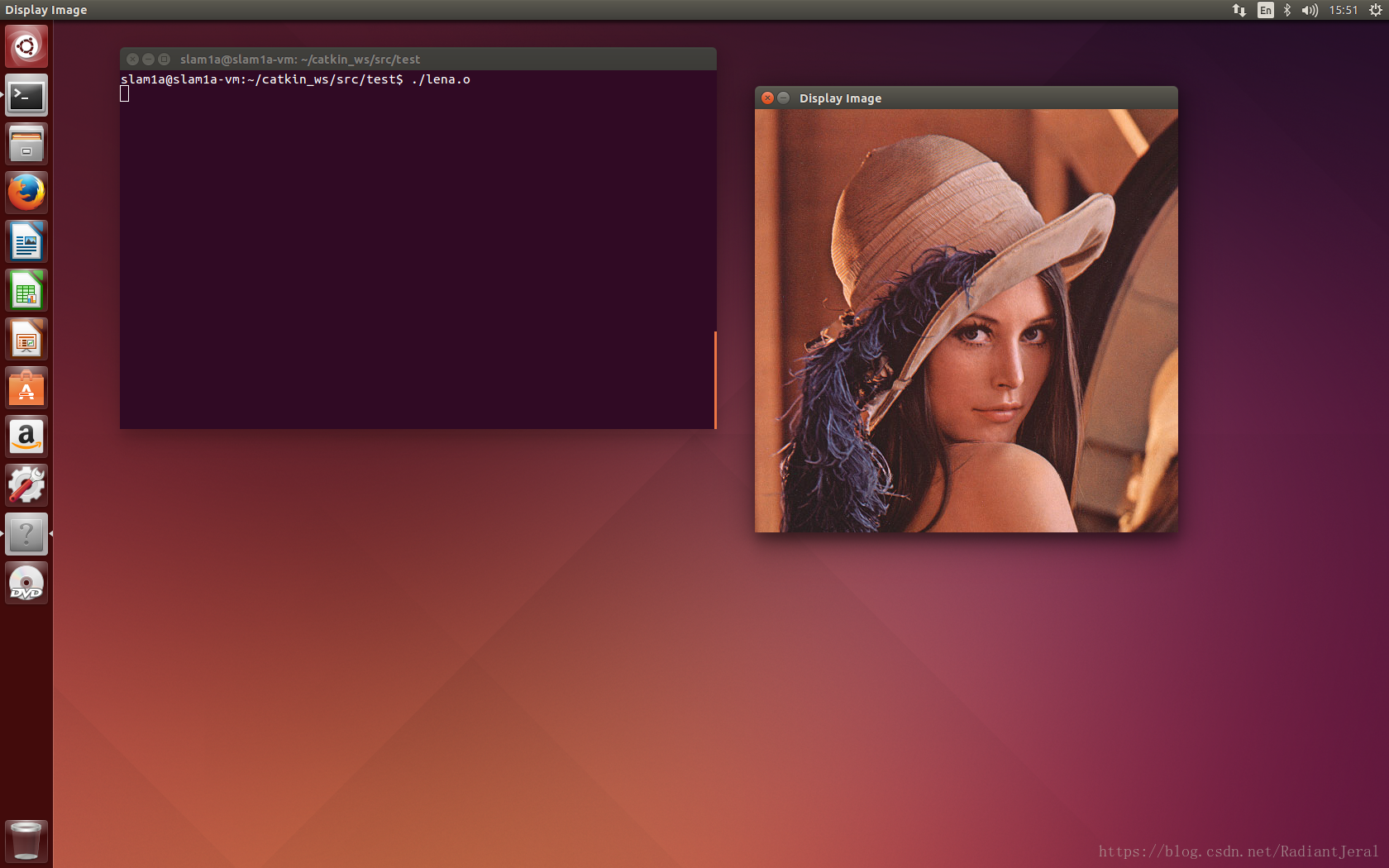
OpenCVC вбОГЩЙІАВзАЁЃ
3.3 Eigen3
зюЕЭвЊЧѓАцБОЮЊ3.1.0ЁЃдкhttp://eigen.tuxfamily.org ЯТди Eigen3.2.10 бЙЫѕЮФМўЃЌВЂНтбЙЁЃ
НјШы~/catkin_ws/src/
cd ~/catkin_ws/src/
wget https://bitbucket.org/eigen/eigen/get/3.2.10.tar.bz2
tar -xjf 3.2.10.tar.bz2
ЕУЕНeigen-eigen-b9cd8366d4e8ФПТМЃЌжиУќУћeigen-3.2.10
mv eigen-eigen-b9cd8366d4e8/ eigen-3.2.10
БрвыАВзАeigen3.2.10
cd eigen-3.2.10/mkdir buildcd buildcmake ..makesudo make install
Eigen3.2.10 АВзАЭъБЯ
4 БрвыАВзА ORB-SLAM
4.1 ЯТди ORB-SLAM дДТы
НјШы ROS ЙЄзїПеМф ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/raulmur/ORB_SLAM.git ORB_SLAM
4.2 ЩшжУЛЗОГБфСП
ORB-SLAMЯюФПЕФОјЖдТЗОЖPATH_TO_PARENT_OF_ORB_SLAMЮЊ~/catkin_ws/src/ORB-SLAMЁЃЩшжУЛЗОГБфСПROS_PACKAGE_PATHЮЊ~/catkin_ws/src/ORB_SLAMЁЃ
- ДђПЊ
~/.bashrcЃЌНЋЯТСаУќСюЬэМгдкЮФМўзюЯТУцЃЌБЃДцЭЫГіЁЃ
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/catkin_ws/src/ORB_SLAM
- МЄЛю
~/.bashrcЮФМў
source ~/.bashrc
етбљЃЌДђПЊУПИіаТЕФshellКѓОЭздЖЏЬэМгСЫЛЗОГБфСПЁЃ
4.3 Брвыg2o
НјШыФПТМ ORB_SLAM/Thirdparty/g2o/ЃЌВЂдкУќСюаажажДааУќСюЃЌ
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make
g2o БрвыЭъБЯ
4.4 БрвыDBoW2
НјШыФПТМ ORB_SLAM/Thirdparty/DBoW2/ЃЌВЂдкУќСюаажажДааУќСюЃЌ
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make
DBoW2 БрвыЭъБЯ
4.5 БрвыORB-SLAMЯюФП
ЬиБ№ашвЊзЂвтЕФЪЧЃЌЮвУЧАВзАЕФ ROS АцБОЪЧ ROS IndigoЃЌашвЊНЋИљФПТМЯТЕФ
manifest.xmlЮФМўжаЕФopencv2вРРЕвЛааЕФДњТыШЅЕєЃЁ
# гУ <!-- ... --!> НјаазЂЪЭ
#
<!-- <depend package="opencv2"/> -->
НјШыФПТМORB_SLAMЯюФПИљФПТМЃЌВЂдкУќСюаажажДааУќСюЃЌ
mkdir build
cd build
cmake .. -DROS_BUILD_TYPE=Release
make
ORB-SLAM БрвыЭъГЩ
5 дЫаа ORB-SLAM
5.1 зМБИВтЪдЪ§Он
- ЯТдиЪ§ОнМЏ
Дгhttp://webdiis.unizar.es/~raulmur/orbslam/downloads/Example.bag.tar.gzЯТдиНтбЙЕУЕН
Example.bagНјааВтЪдЁЃ
cd ~/Downloads/http://webdiis.unizar.es/~raulmur/orbslam/downloads/Example.bag.tar.gztar -xzf Example.bag.tar.gz
- НјШы
~/catkin_ws/src/ORB_SLAM/DataФПТМЃЌНтбЙORBvoc.txt.tar.gzЕУЕНORBvoc.txt
cd ~/catkin_ws/src/ORB_SLAM/Datatar -xzvf ORBvoc.txt.tar.gz
ВтЪдЪ§ОнМЏзМБИОЭаї
5.2 дЫаа ORB-SLAM
ЪЙгУИљФПТМЯТЕФlaunchЮФМўЦєЖЏГЬађЃЌORB_SLAMЯюФПФПТМЯТАќКЌСНИіlaunchЮФМўЃКExampleFuerte.launch КЭ ExampleGroovyOrNewer.launchЃЌЖдгІВЛЭЌЕФROSАцБОЃЌИљОнROSЕФАцБОбЁдёВЛЭЌЕФlaunchЮФМўЁЃlaunchЮФМўЪЧвЛИіНХБОЮФМўЃЌАќКЌЦєЖЏГЬађЕФИїИіВНжшЁЃНгЯТРДЃЌАДЯТСаВНжшЦєЖЏ ORB-SLAMЁЃ
- ДђПЊжеЖЫЃЈПьНнМќctrl+alt+tЃЉЃЌжДааУќСюЦєЖЏROSЗўЮё
roscore
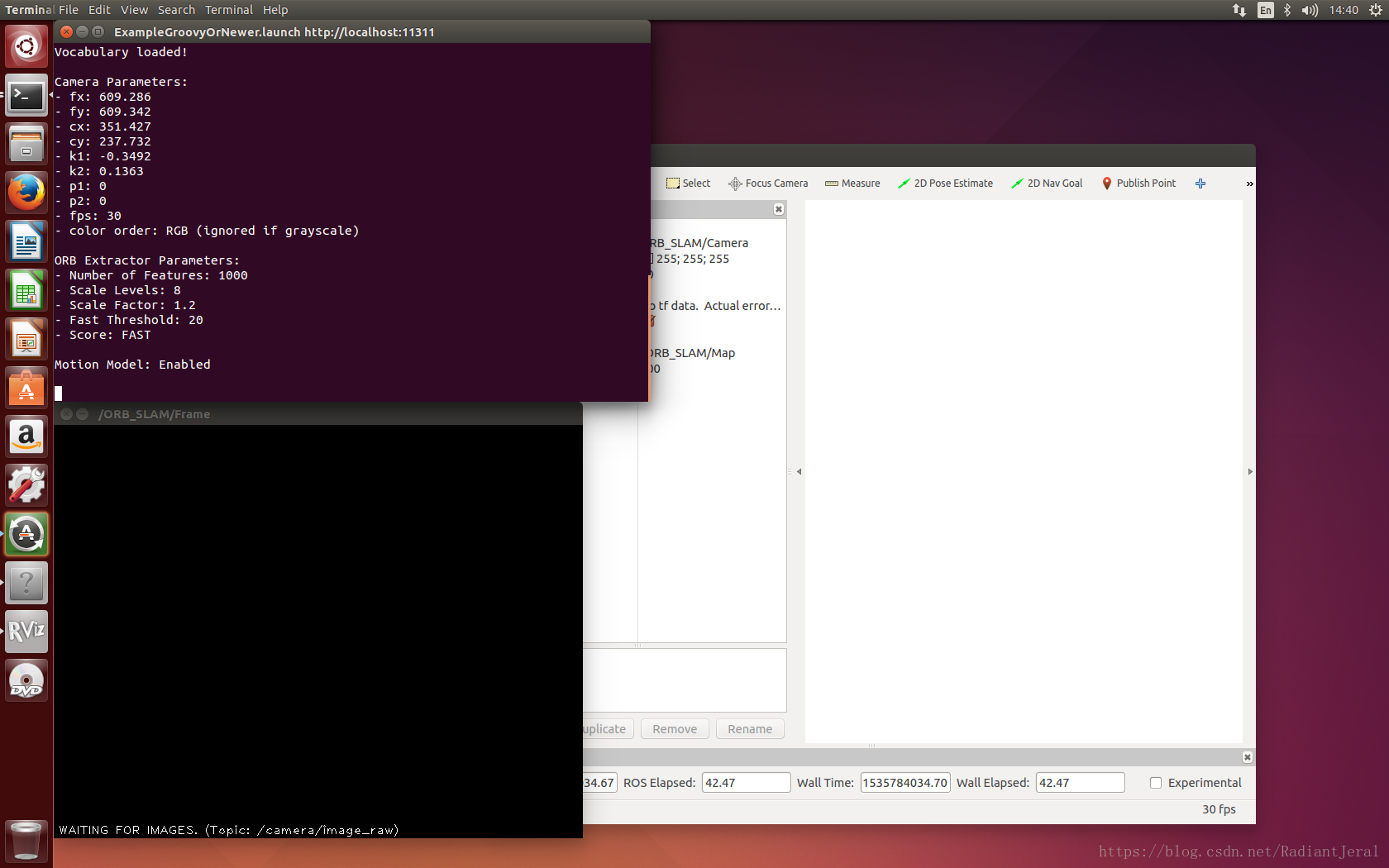
- ПЊЦєаТЕФжеЖЫЃЌНјШыlaunchЫљдкФПТМЃЌжДааУќСю
roslaunch ExampleGroovyOrNewer.launch
- ПЊЦєаТЕФжеЖЫЃЌНјШыВтЪдгУР§Example.bagЫљдкЕФФПТМЃЌжДааЯТУцЕФУќСюЃЌЦєЖЏКѓЃЌАДsМќПЩвдЕЅВНВщПДдЫааНсЙћ
rosbag play --pause Example.bag
жДааЯТУцУќСюЃЌЭъећдЫаа
rosbag play Example.bag
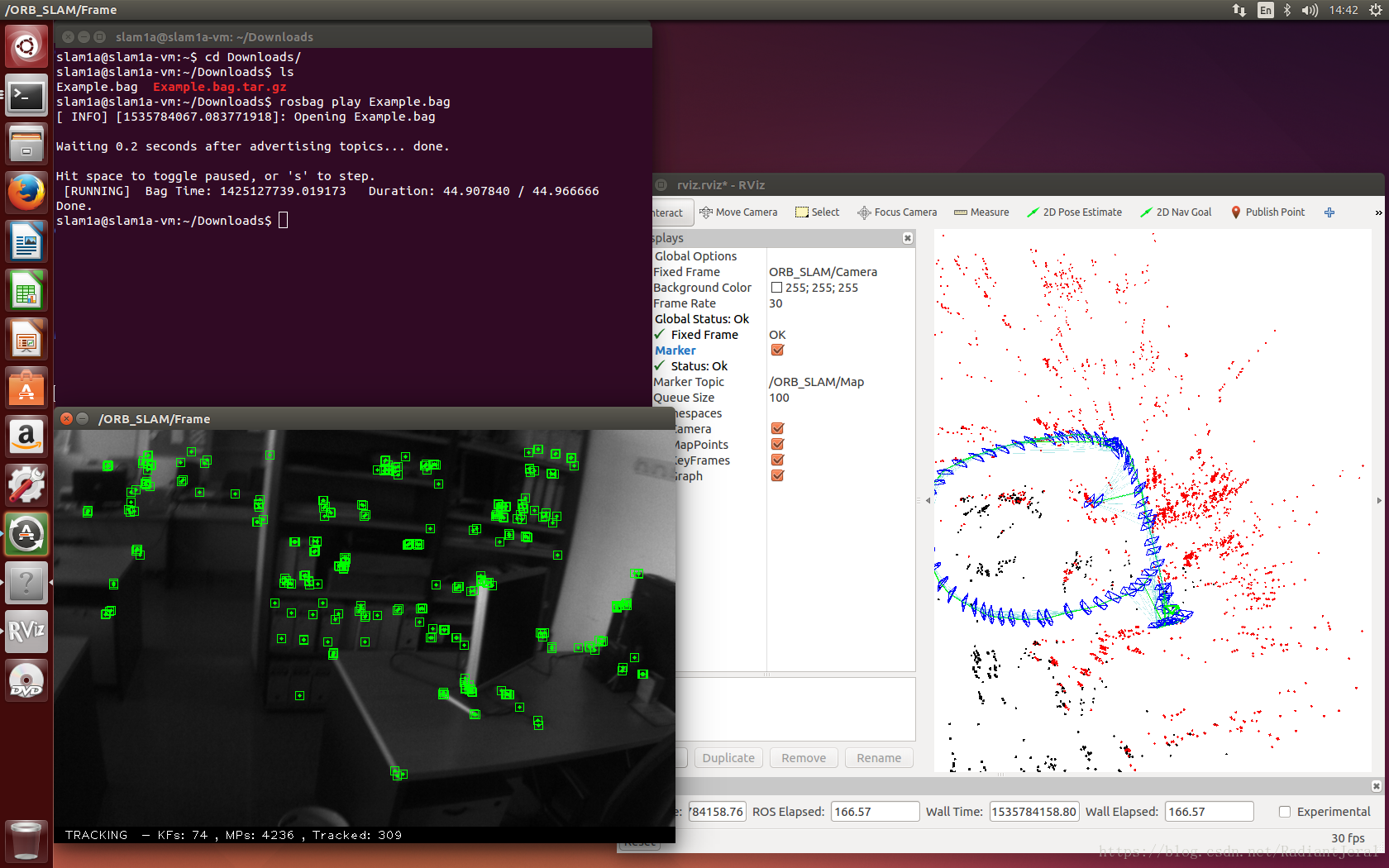
ORB-SLAM ГЩЙІдЫаа