文章目录
- 前言
- 四、Uniform grids
-
-
- 预处理(Pre-Processing)――构建加速网格
- 求光线-场景相交
- 格子的分辨率
- Uniform Grads的利弊
-
- 五、空间划分Spatial Partitions
-
-
- 不同的空间划分示例
- KD-Tree预处理
- 用于存储KD-Tree的数据结构
- KD-Tree的遍历(Traversing a KD-Tree)
-
- 六、物体划分与层次包围盒(Object Partitions & Bounding Volume Hierarchy, BVH)
-
-
- BVH的原理
- BVH的构建
- BVH的存储数据结构
- BVH的光线求交算法
- 空间划分与物体划分的比较(Spatial vs Object Partitions)
-
- 课程的最后
前言
本篇的内容是光线追踪的加速方法。
四、Uniform grids
预处理(Pre-Processing)――构建加速网格
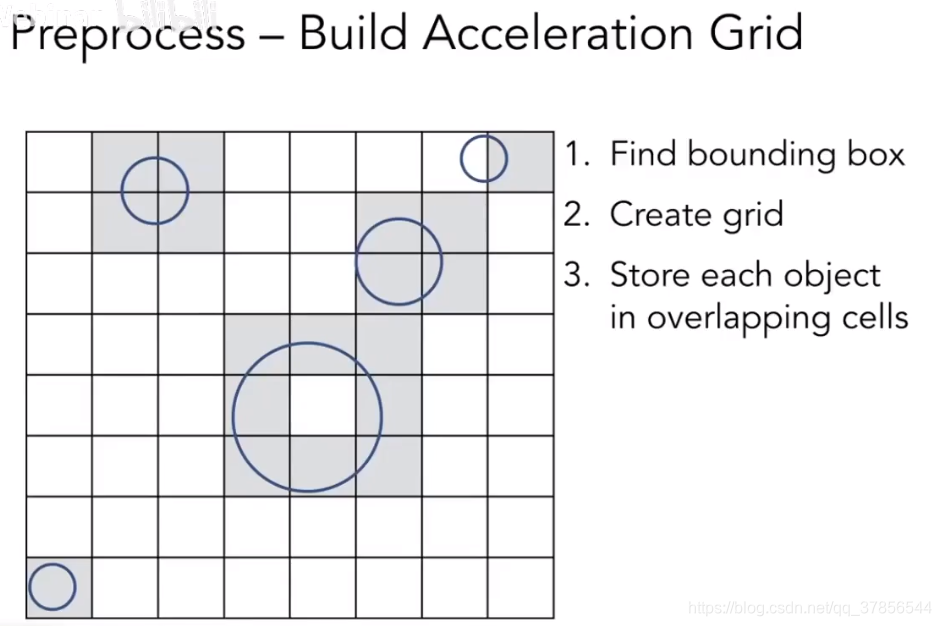
1.找到场景包围盒。2.创建网格。3.将场景中的每个物体存入重叠的格子中,也就是将于物体表面相交的格子标记出来。
求光线-场景相交
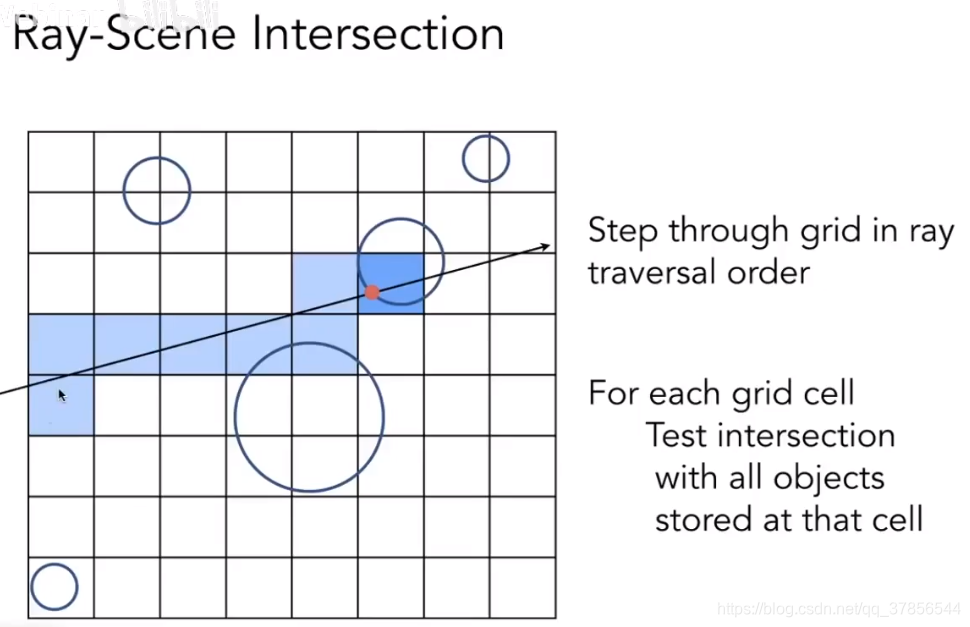
我们首先假设,光线与格子相交相对于与物体相交的效率更高。我们按照光线的寻访顺序将与光线相交的格子再标记出来。然后测试同时与光线和物体相交的格子中,光线与物体是否相交。
格子的分辨率
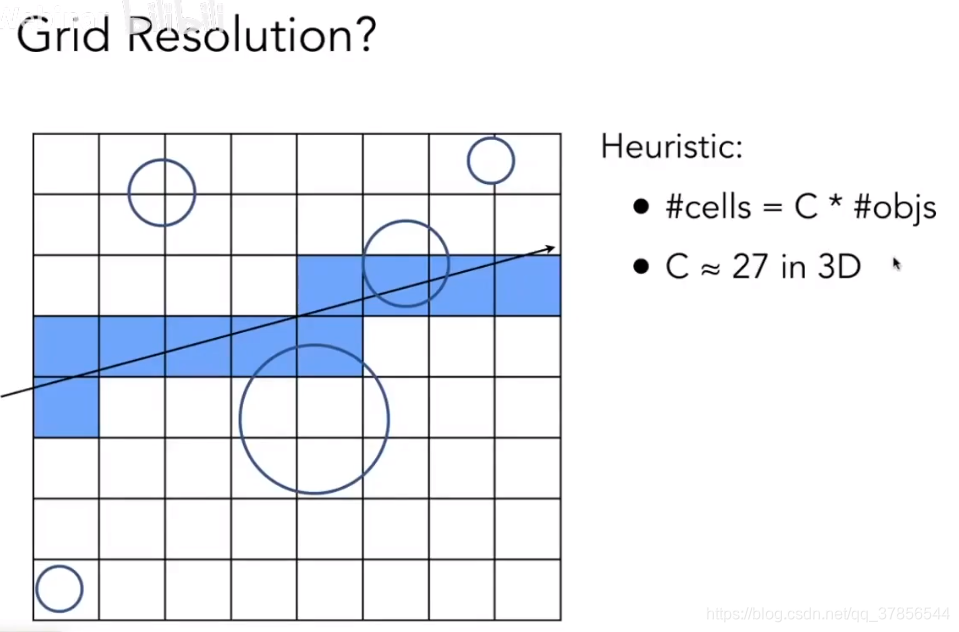
格子不能太稀疏也不能太密集。人们根据经验总结得出以上公式。
Uniform Grads的利弊

对于上述方法,当处理物体分布均匀的场景时。带来的性能提升比较明显。

对于场景中物体分布比较稀疏的场景,比如类似“运动场中的茶壶”这样的场景,拥有大片留空的场景,效果就很不好。因为会进行大量无用的计算。
五、空间划分Spatial Partitions
空间划分的思想是,识别空间中比较空旷的区域,采用不同大小的网格。
不同的空间划分示例
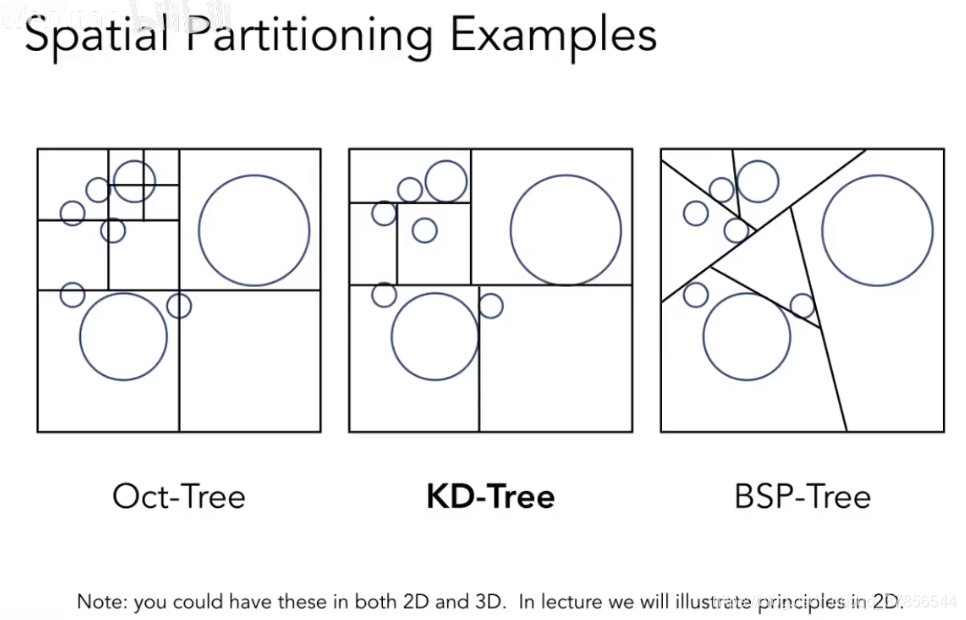
八叉树(Oct-Tree):二叉树是一个节点有两个子节点,八叉树就是一个节点有八个子节点。
八叉树空间划分将一个三维空间切成八份(上图用二维空间演示所有是四分,不要奇怪)。再将切出来的子空间再切成八份。直到出现某些子空间不再包围物体,或者该子空间如果再切的话其中七个子空间都不再包围物体,或者子空间已经很小了(我想说的是,切到什么程度有不同的标准)。
通过上述切割方法,我们将原本的空间划分成若干大小不均匀的空间。
八叉树有个问题,如果我们不是在三维空间中使用空间划分(游戏应该用不上),而是在更高维的空间中使用,比如说四维空间,那就不是八叉树了而是十六叉树。
KD-Tree:KD-Tree和八叉树有点相似,但是KD-Tree会在一个格子中,沿着x,y或者z轴,找到一个特定的位置,再在这个特定位置沿着特定轴划分空间。
BSP-Tree:相较于KD-Tree,BSP-Tree不再局限于沿着x,y,z轴,而是沿着任意方向划分空间。但是还记得之前提到过的吗?AABB之所以要沿轴是因为沿轴的公式相对简单。所以KD-Tree在性能上要优于BSP-Tree。
KD-Tree预处理
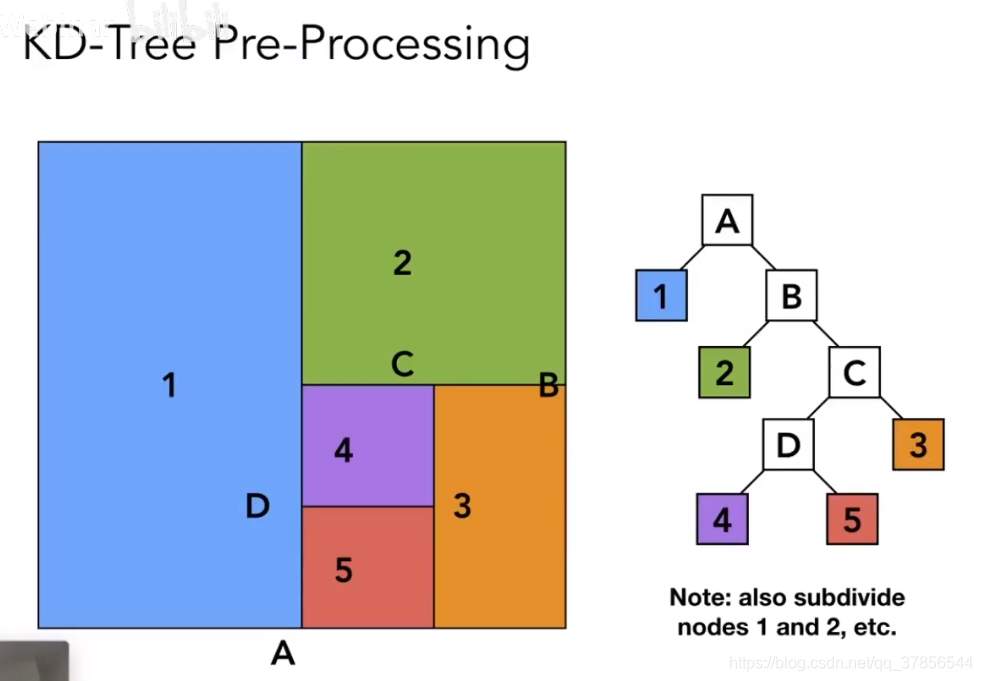
该怎么做,之前已经说了。需要再提一句的是,对于KD-Tree分割完毕的实际物体信息,我们只需要存储到叶子节点就行了。
用于存储KD-Tree的数据结构
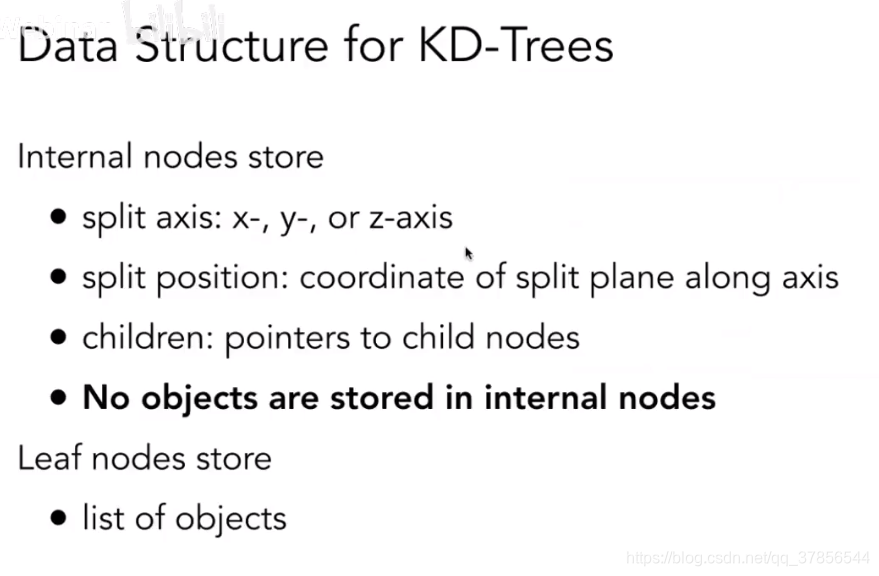
那么如何存储KD-Tree。对于中间节点我们需要保存切割轴,切割点,以及切割后的子节点。不需要保存物体信息。
对于叶子节点,我们需要存储实际的物体信息。
KD-Tree的遍历(Traversing a KD-Tree)
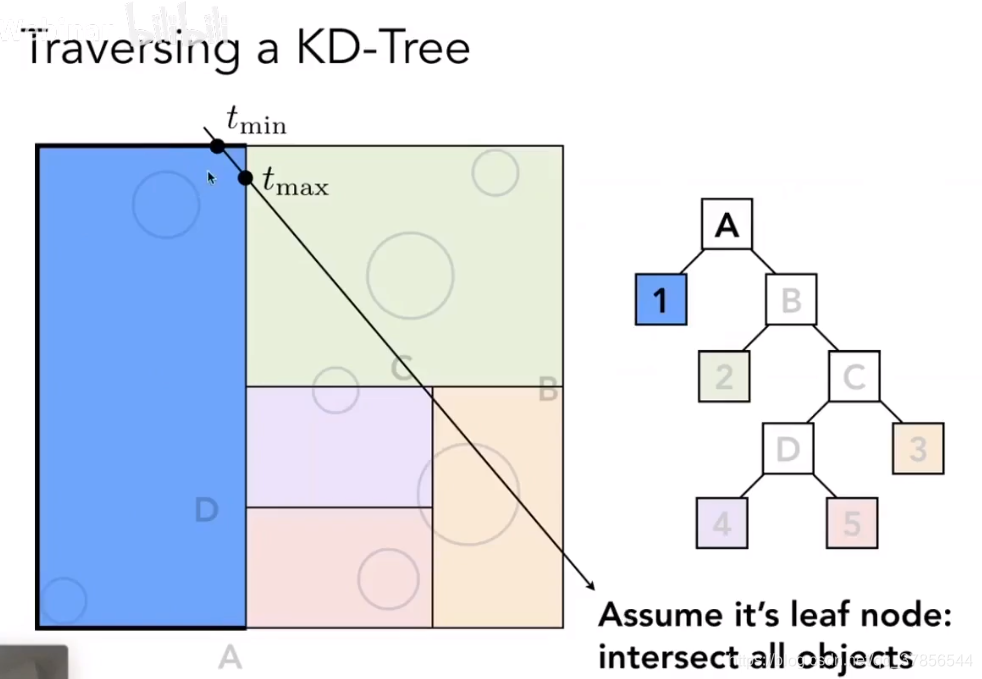
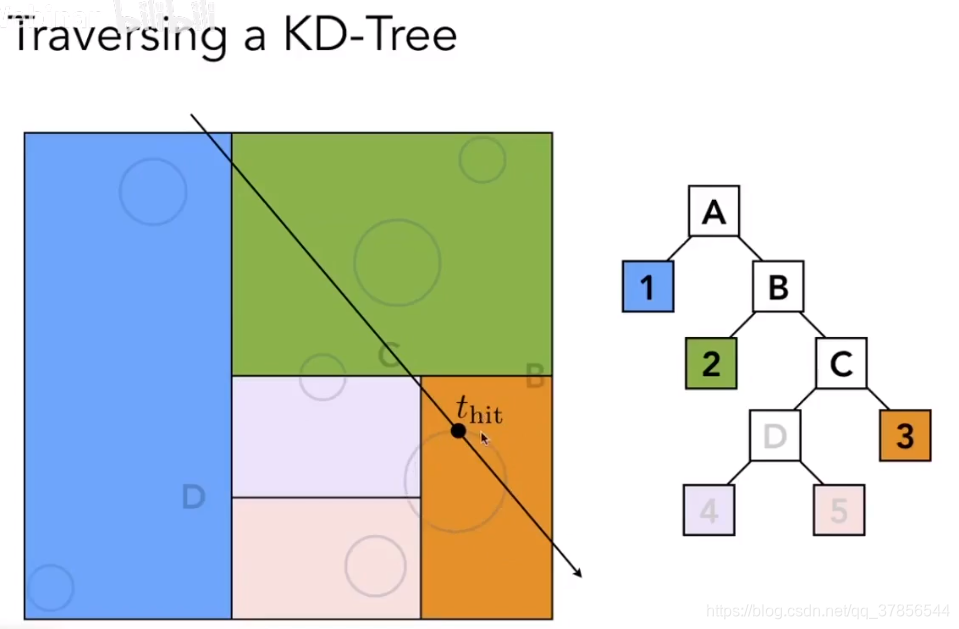
当光线穿过叶子节点时, 计算与该叶子节点中的物体的交点。当不是叶子节点时,遍历到下一级。
六、物体划分与层次包围盒(Object Partitions & Bounding Volume Hierarchy, BVH)
BVH的原理
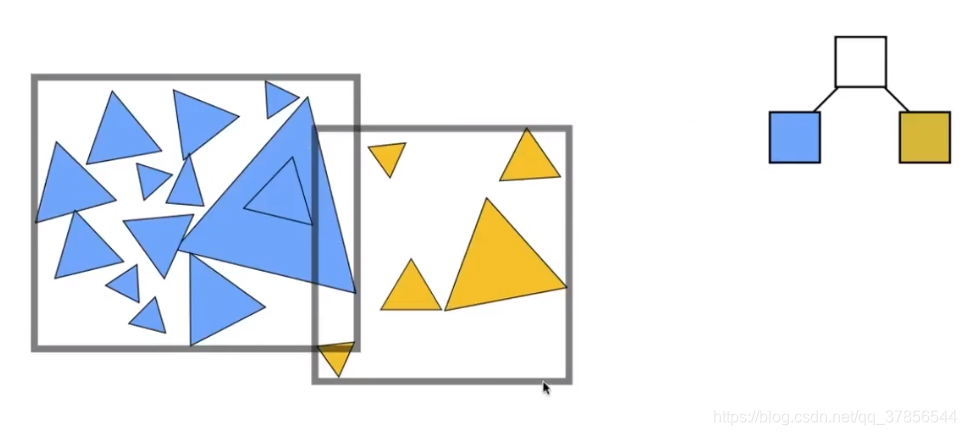
将一个场景中的物体(三角形)组织成两部分,再分别求他们的包围盒。
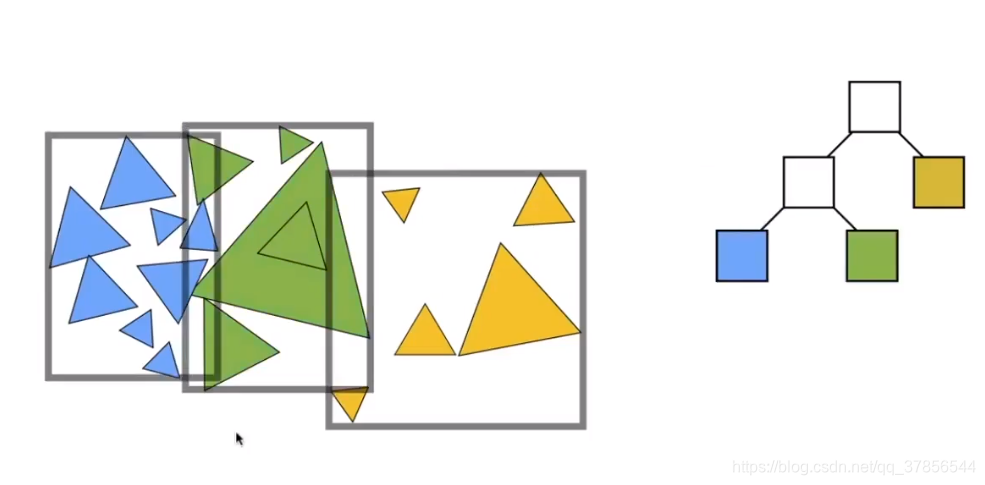
接着,对划分之后的两部分再进行划分,再分别求包围盒。
可以看出,BVH解决了KD-Tree单个几何结构会出现在多个子节点的问题。但是BVH自己也有一个问题,那就是包围盒可能重叠,如上图出现的情况。所以BVH的物体划分是一门学问。
BVH的构建
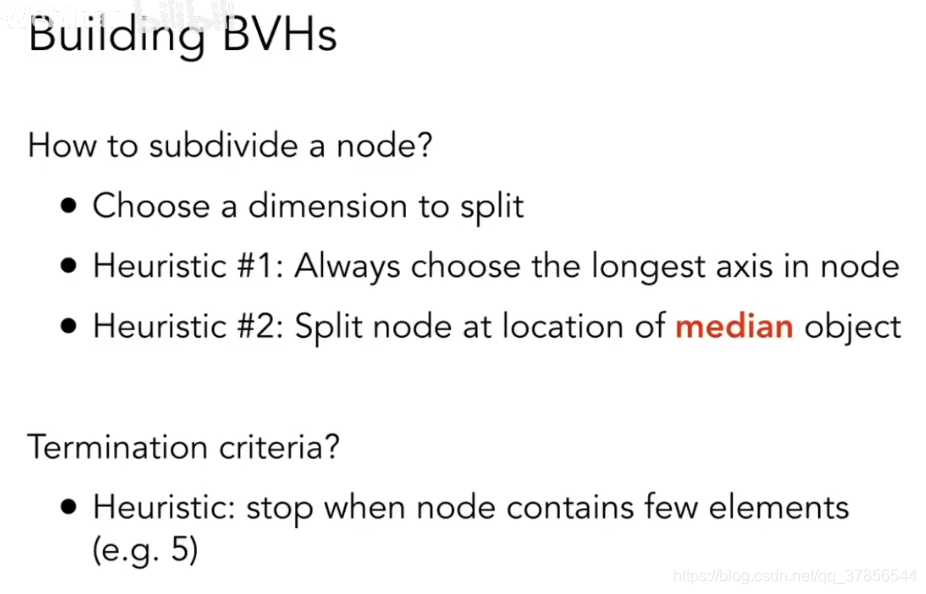
选择一个维度(x, y, z)来进行划分。
技巧1:总是选择节点中最长的轴来进行划分,假如是一堆物体在空间中占了一个长条,也就是在某个轴上占的越多,那么就划分这个轴。
技巧2:在中间的物体那里将物体分成两部分。这样能保证分出来的两部分包含的物体数量差不多。在数据结构中,这样的结构更利于查询。具体做法可以根据物体在轴上的位置进行排序来得到中间的物体。
当划分后的节点中物体数量很少(比如小于5个)时,就不再进行划分。
BVH的存储数据结构
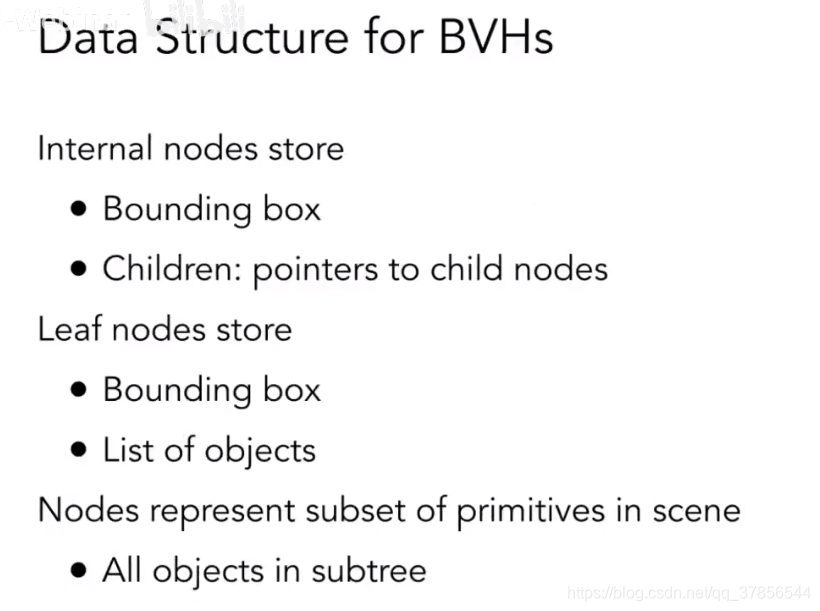
中间节点只存储包围盒,和子节点指针。叶子节点存储包围盒以及其中的物体。和KD-Tree的数据结构相似。
BVH的光线求交算法
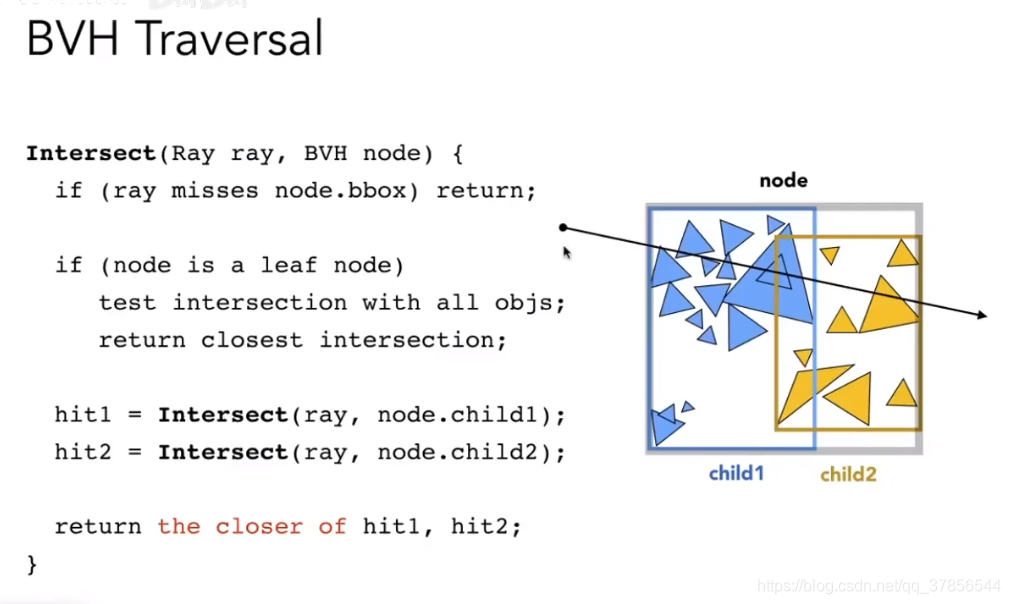
上图为BVH节点和光线求交的伪代码。如果节点为叶子节点,我们就需要将光线和叶子节点中的物体再求交。如果节点为中间节点,也就是光线确实打到了Bounding Box的同时打到的不是叶子节点,那么我们需要递归计算该中间节点的两个子节点和光线的相交。
空间划分与物体划分的比较(Spatial vs Object Partitions)
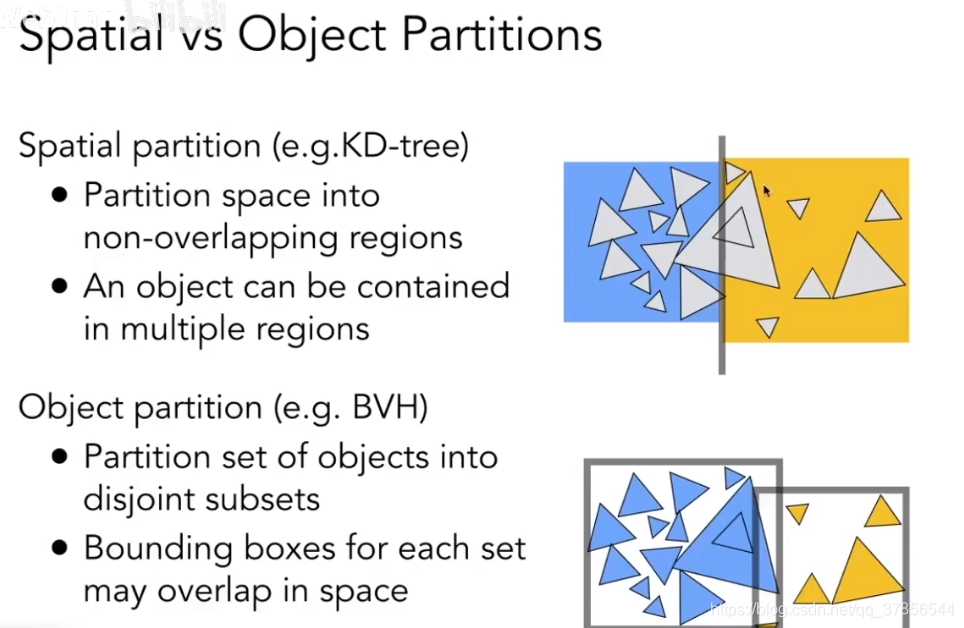
空间划分划分出的空间不会重叠,但是一个物体可能被划分到多个空间。物体划分划分出的空间可能会重叠,但是一个物体只会被划分到一个空间。事实是,空间重叠带来的问题并不大。
课程的最后
接下来的内容为辐射度量学。