Bվ�˺ţ�С��ѧǶ��ʽ
- ? ��Һ��ۣ�����С�⣬Ƕ��ʽ�����ߣ�һ����Ҫ��Ϊϵͳ�ܹ�ʦ�Ĵ��ѧ����
- ?�����ʼϵͳ�Բ�ϰSTM32����֪ʶ���滮�У�����ͨ�ţ�Github��Ucos�ȵȡ�
- ?�����ܽ�һ�´���ͨ�ţ��������ڴ���ʵ�������⡣
����ͨ��
-
- �����벢��
-
-
- 1.����ͨ��
- 2.����ͨ��
-
- ȫ˫�����˫��
-
-
- 1.ȫ˫����
- 2.��˫��
-
- ͬ��ͨ�ź��첽ͨ��
-
-
- 1.ͬ��ͨ��
- 2.�첽ͨ��
-
- һ.SPIͨ��
-
-
- 1.���䲽��
- 2.SPI��ȱ��
-
- ��.UARTͨ��
-
-
- 1.����ԭ��
- 2.���䲽��
- 3.UART��ȱ��
-
- ��.I2Cͨ��
-
-
- 1.����ԭ��
-
- �ܽ�
�����벢��
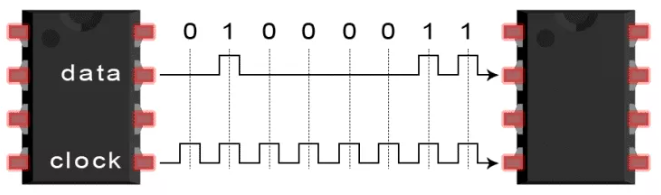
1.����ͨ��
λͨ��������һһ���ͣ���ͼ��ʾ�˶����ƣ�01000011������ĸ��C���Ĵ��д��䡣
��ʱ����Ϊ�ߵ�ƽʱ����������λ���ߵ�ƽΪ1���͵�ƽΪ0��
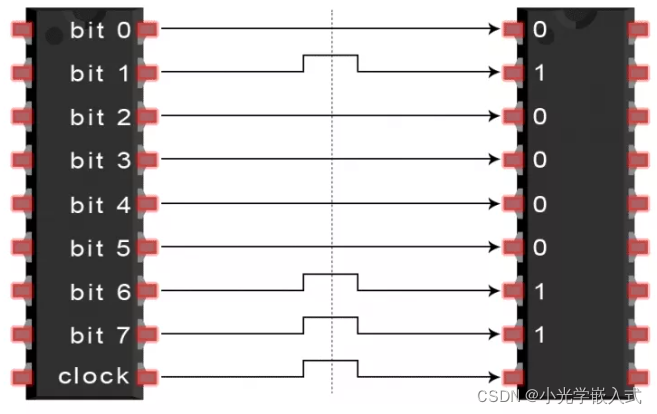
2.����ͨ��
����λ�ڵ�����ͬʱ���䣬��ͼ��ʾ�˶����ƣ�01000011������ĸ��C���IJ��д��䣺
�ĵ�ʱ����Ϊ�ߵ�ƽʱ��8������λͬʱ�������ݣ��ߵ�ƽΪ1���͵�ƽΪ0
����UART��SPI��I2C���Ǵ���ͨ�ţ���Ϊ���Ƕ���ͨ��һ������Ϊ�����ߴ������ݡ�
ȫ˫�����˫��
1.ȫ˫����
����˵�����������ڴ�绰ʱ�����ǿ�����ͬһʱ��˵���������ȫ˫��ͨ�ţ�
2.��˫��
��Եģ���Ȼ��˫��Ҳ���Ի����ͨ�ţ�������ͬһʱ��ֻ�ܵ����������ݣ�
UART��SPI����ȫ˫��ͨ�ŷ�ʽ����Ϊ���ǵ������߶�����������������ͬһʱ��A�����ݸ�B��BҲ���������ʱ�������ݸ�A����I2Cͨ�ţ���Ϊ��ֻ��һ�������ߣ�������������ͬһʱ��˫�������ݡ�
ͬ��ͨ�ź��첽ͨ��
ͬ��������ģʽ���첽��������ģʽ��
1.ͬ��ͨ��
�����ͷ��������ݺȽ��շ�������Ӧ�Ժ�ŷ���һ�����ݰ���ͨѶ��ʽ��
2.�첽ͨ��
�����ͷ��������ݺ��Ƚ��շ�������Ӧ�����ŷ����¸����ݰ���ͨѶ��ʽ��
����SPI��I2C����ͬ��ͨ�ţ���Ϊ���Ƕ���ʱ���ߣ�UART���첽ͨ�ŷ�ʽ����ֻ�����������ߣ����������ݲ���ȷ�����Ƿ���յ���
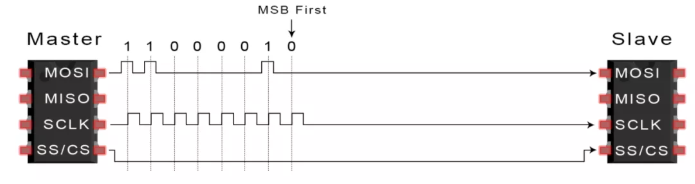
һ.SPIͨ��
SPI�������жϴ������ݣ����������ط��ͻ��������������λ������I2C��UART�У����������ݰ�����ʽ���ͣ�����λ����
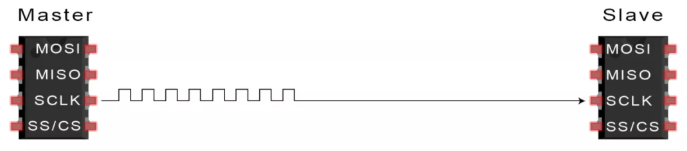
��SPI�豸�У��豸��Ϊ���������豸��ͨ�������������ʹӻ���ͨ���Ǵ���������ʾ���ʹ洢оƬ���豸���ӻ��������ǻ�ȡָ�
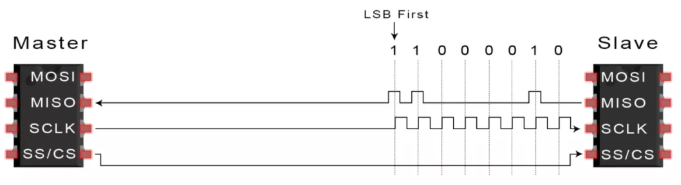
SPI�ź��������֣�
MOSI-�ź��ߣ�����������ӻ����룻
MISO-�ź��ߣ��������룬�ӻ������
SCLK-ʱ���źţ�
SS/CS-Ƭѡ�źţ�
SPIЭ���ص�
ʵ���ϣ��ӻ���������ϵͳ���ص��ݵ����ƣ����ή�������ڵ�ѹ��ƽ֮��ȷ�л���������
ʱ���ź�
ÿ��ʱ�����ڴ���һλ���ݣ�������ݴ�����ٶ�ȡ����ʱ���źŵ�Ƶ�ʡ� ʱ���ź������������������ɵģ����SPIͨ��ʼ��������������
�豸����ʱ���źŵ��κ�ͨ��Э�鶼��Ϊͬ����SPI��һ��ͬ��ͨ��Э�飬����һЩ�첽ͨ�Ų�ʹ��ʱ���źš� ������UARTͨ���У�˫��������ΪԤ�����õIJ����ʣ��ò����ʾ��������ݴ�����ٶȺ�ʱ��
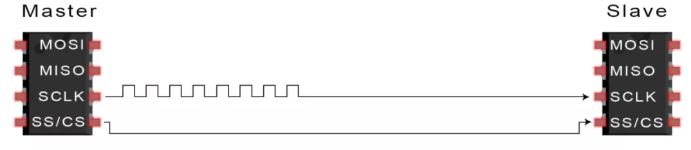
Ƭѡ�ź�
����ͨ�����ʹӻ���CS/SS��ʹ��ͨ�š�������������ڶ��CS/SS���ţ��������������ӻ�����ͨ�š�
1.���䲽��
1.�������ʱ���ź�
2.��������SS/CS���ţ�����ӻ�
3.����ͨ��MOSI�����ݷ����ӻ�
4.�����Ҫ��Ӧ����ӻ�ͨ��MISO�����ݷ��ظ��ӻ�
2.SPI��ȱ��
�ŵ�������ʼλ��ֹͣλ��������ݿ��Գ������䲻���жϣ����ݴ������ʿ죨��I2C�켸����������������MISO��MOSI����ͬʱ���ͺͽ������ݡ�
ȱ����ʹ���ĸ��ߣ�I2Cʹ�������ߣ���û���źŽ��ճɹ���ȷ�ϣ�I2C�ɴ˹��ܣ���û���κ���ʽ�Ĵ����飨UART�е���żУ��λ����
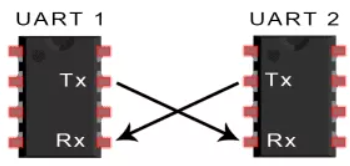
��.UARTͨ��
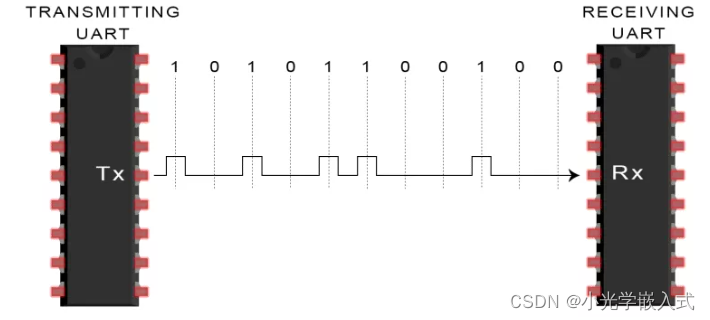
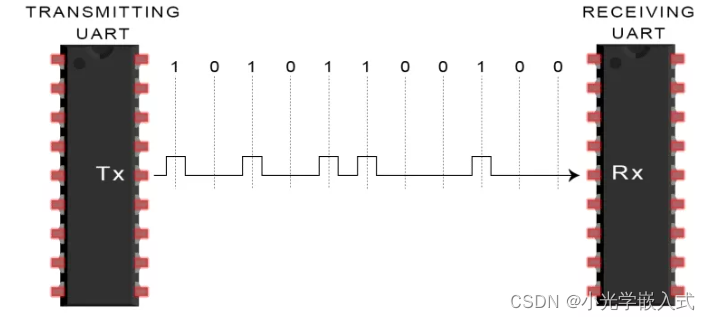
����UARTֱ���ͨ�š�����UART�������豸����CPU���IJ�������ת��λ������ʽ���Դ��е���ʽ���䷢�͵�����UART��ֻ��Ҫ��������������UART֮�䴫����Ϣ��
UART�����첽ͨ�ţ�û��ʱ���źš����������ݰ������ӿ�ʼ��ֹͣλ����Щλ���������ݰ��Ŀ�ʼ�ͽ�������˽���UART֪����ʱ��ȡ��Щ���ݡ�
������UART����ʼλʱ���������ض��IJ����ʵ�Ƶ�ʶ�ȡ�����ݴ����ٶȵĶ���������ÿ���������bps����ʾ������UART�����Դ�Լ��ͬ�IJ����ʹ��������͵Ľ���UART֮��IJ�����ֻ�����Լ10%��
1.����ԭ��
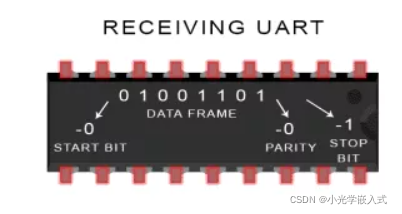
UART���ݰ�������һ����ʼλ��5��9������λ��ȡ����UART����һ����ѡ�����ż����λ�Լ�һ��������ֹͣλ��
screen-capture
��ʼλ
UART���ݴ�����ͨ���ڲ���������ʱ�����ڸߵ�ƽ��ƽ����ʼ����ʱ����UART��һ��ʱ�������ڽ������ߴӸߵ�ƽ���͵��͵�ƽ��������UART���ߵ�ѹת��ʱ������ʼ�Բ����ʵ�Ƶ�ʶ�ȡ����֡�е�λ��
����֡
����֡�ڰ������ڴ����ʵ�����ݡ�ʹ����żУ��λ��5-8λ����ʹ����������9λ��
У��λ
��żУ��λ�ǽ���UART�жϴ����ڼ��Ƿ����κ����ݸ��ĵķ�ʽ������UART��ȡ����֡��������ֵΪ1�������м��������Ҽ��������ż�������������Ƿ���������ƥ�䡣
ֹͣλ
�����ݰ��Ľ�β�����źţ�����UART�����ݴ����ߴӵ͵�ѹ�������ߵ�ѹ������λ��ʱ�䡣
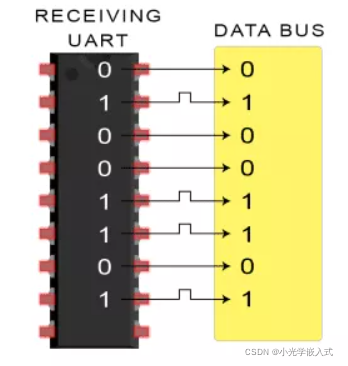
2.���䲽��
1.����UART���������߲��н�������
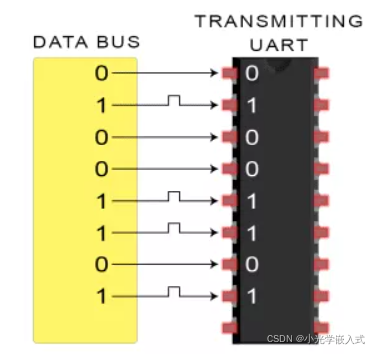
2.����UART����ʼλ����żУ��λ��ֹͣλ���ӵ�����֡��
3.�������ݰ��ӷ���UART���з��͵�����UART������UART��Ԥ�����õIJ����ʶ������߽��в�����
4.����UART��������֡�е���ʼλ����żУ��λ��ֹͣλ��
5.����UART����������ת���ز������ݣ������䴫�䵽���ն˵��������ߣ�
3.UART��ȱ��
�ŵ㣺
1.��ʹ��������
2.�첽ͨ�ţ�����ʱ���ź�
3.������żУ��λ���������д����顢
4.ֻҪ˫�������ú����ݰ��Ľṹ
ȱ�㣺
1.����֡�Ĵ�С���Ϊ9λ
2.��֧�ֶ������ϵͳ����ϵͳ
3.ÿ��UART�IJ����ʱ����ڱ˴˵�10%֮��
��.I2Cͨ��
��˫��ͨ�ţ��������SPI��UART���ŵ㣬���Խ�����ӻ����ӵ�������������SPI����Ҳ���Զ����������һ�������ӻ���
���ߣ�
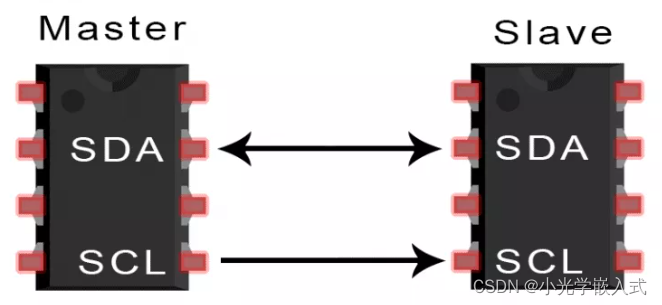
SDA�C������
SCL�Cʱ����
����ͨ��Э�飬��Ҫʱ��ͬ���źŲ������������ơ�
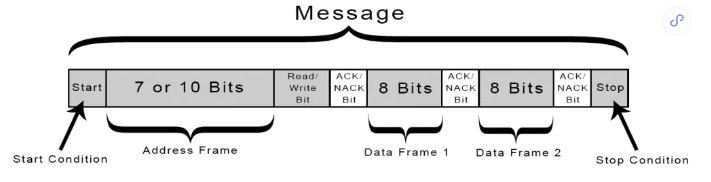
1.����ԭ��
I2C�����ݴ������Զ��msg����ʽ���С�ÿ��msg�������ӻ������Ƶ�ַ֡���Լ�һ�����߶������֡����ʼ������ֹͣ��������/дλ������֮֡���ACK/NACKλ��
*
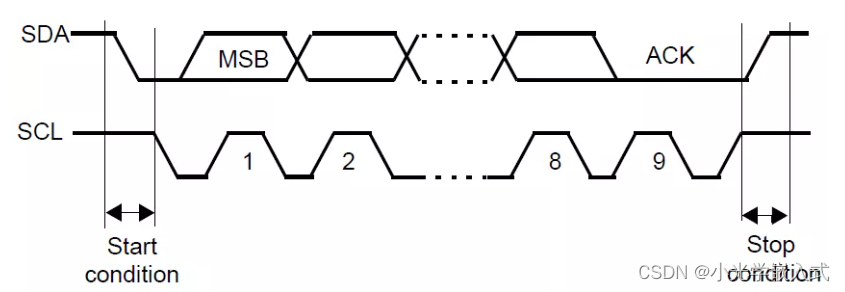
��������
��SCLΪ�ߵ�ƽʱ��SDA�Ӹߵ�ƽ��͵�ƽ�л�
ֹͣ����
��SCL�Ǹߵ�ƽʱ��SDA�ɵ͵�ƽ��ߵ�ƽ�л�
��ַ֡
ÿ�������豸Ψһ��7λ��10λ���У����������豸֮��ĵ�ַʶ��
��/дλ
һλ�������������ӻ�����������Ϊ�͵�ƽ������������Ϊ�ߵ�ƽ
ACK/NACK
��Ϣ�е�ÿ��֡�����һ��ACK/NACKλ������ɹ����յ���ַ֡������֡�������豸�᷵��һ��ACKλ���ڱ�ʾȷ�ϡ�
Ѱַ
��ͬ��SPI��Ƭѡ�ߣ�����Ѱַȷ�ϴӻ��豸��
������Ҫͨ�ŵĴӻ���ַ����ÿ���ӻ���Ȼ��ÿ���ӻ��������Լ��ĵ�ַ����ƥ��Ƚϣ����ƥ�䣬��������������һ���͵�ƽACKλ����ƥ�䲻ִ�в�����SDA���ָߵ�ƽ��
��/дλ
λ�ڵ�ַ֡��ĩβ���������Ҫ��ӻ��������ݣ���Ϊ�͵�ƽ�������������ӻ������������ݣ���Ϊ�ߵ�ƽ��
����֡
���������ӻ���ACKλ�Ϳ��Է���һ������֡�ˡ�����֡ʼ��Ϊ8λ��ÿ������֡�����һ��ACK/NACK��δ��֤����״̬�����������ݷ���ֹͣ������
���䲽��
1.��SCL��Ϊ�ߵ�ƽʱ������ͨ����SDA�ߴӸߵ�ƽ�л����͵�ƽ����������ͨ�š�
2.���������߷���Ҫ��֮ͨ�ŵĴӻ���7λ��10λ��ַ���Լ���/дλ
3.ÿ���ӻ����������͵ĵ�ַ�����Լ��ĵ�ַ���бȽϡ������ַƥ�䣬��ӻ�ͨ����SDA������һλ����һ��ACKλ����������ĵ�ַ��ӻ��ĵ�ַ��ƥ�䣬��ӻ���SDA�����ߡ�
4.�������ͻ��������֡��
5.������ÿ������֡�����豸����һ��ACKλ���ظ����ͷ�����ȷ���ѳɹ����յ���֡��
6.���������SCL�л�Ϊ�ߵ�ƽ��Ȼ���ٽ�SDA�л�Ϊ�ߵ�ƽ���Ӷ���ӻ�����ֹͣ������
I2C�ŵ�
1.����ʹ��������
2.֧�ֶ�������ʹӻ�
3.Ӳ����UART����
I2Cȱ��
1.���ݴ����SPI��
2.����֡��С����Ϊ8λ
�ܽ�
�ڲ�ͬ��ʱ�����ѡ��ʹ�ò�ͬ��ͨ�ŷ�ʽȥ���һ����Ŀ��������ʹ��һЩ��������ʱ���������ض���ͨ�ŷ�ʽ��������Щͨ�ŷ�ʽ��Ҫȥ�˽�ȥѧϰ��ʵ�ֵġ�