MSM8909+Android5.1.1SPI驱动开发(PSAM部分)
1. PSAM部分的硬件设计
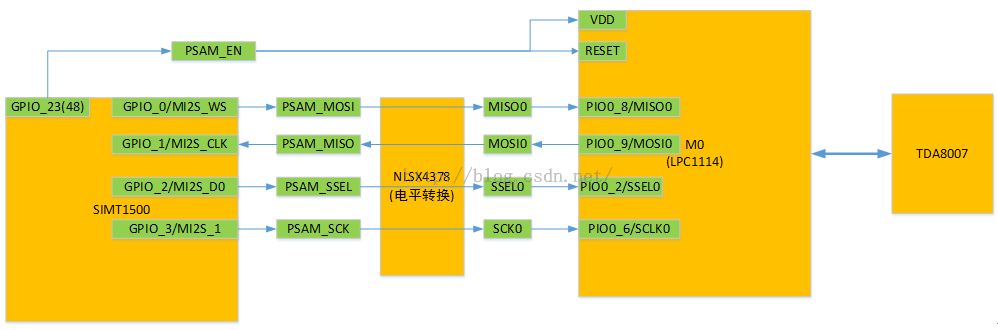
图1
CS 片选信号
SCK 时钟信号
MISO 主设备的数据输入、从设备的数据输出脚
MOSI 主设备的数据输出、从设备的数据输入脚
2. PSAM部分软件设计

图2
(1) PSAM应用
这部分只需要调用API函数即可。
(2) PSAM API
API的主要工作就是给M0上电、设置SPI读写模式、设置SPI读写的每字节的位数、SPI的工作频率等。
(3) SPI驱动
接收到API设置SPI的参数后做相应的工作。
(4) M0固件
和TDA8007的主要工作由M0固件完成,包括协议的等等。
3. 组件配置
kernel\arch\arm\configs\msm8909-1gb-CB03-perf_defconfig配置文件,确保下面选项设置如下:
CONFIG_SPI=y
CONFIG_SPI_QUP=y
CONFIG_SPI_SPIDEV=m,后来给改为y
如果是user版本就采用此文件,如果是eng文件就改msm8909-1gb-CB03_defconfig文件。
4. 设备树配置
PSAM部分设备树节点的设置层次
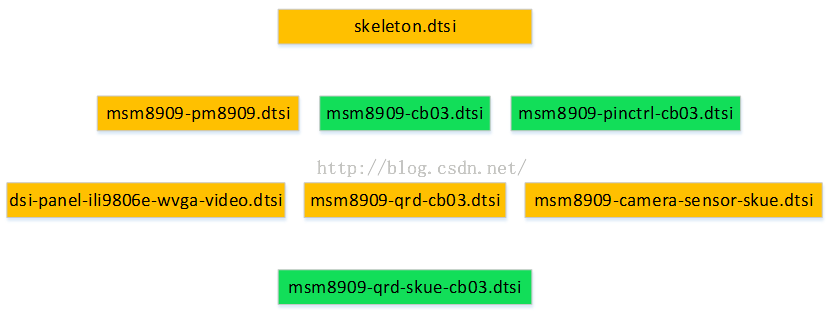
图3
其中绿色矩形框部分是PSAM部分需要修改。
4.1 kernel\arch\arm\boot\dts\qcom\msm8909-cb03.dtsi增加SPI2控制器设备节点
aliases { /* smdtty devices */ smd1= &smdtty_apps_fm; smd2= &smdtty_apps_riva_bt_acl; smd3= &smdtty_apps_riva_bt_cmd; smd5= &smdtty_apps_riva_ant_cmd; smd6= &smdtty_apps_riva_ant_data; smd7= &smdtty_data1; smd8= &smdtty_data4; smd11= &smdtty_data11; smd21= &smdtty_data21; smd36= &smdtty_loopback; sdhc1= &sdhc_1; /* SDC1 eMMC slot */ sdhc2= &sdhc_2; /* SDC2 SD card slot */ //spi0= &spi_0; /* SPI0 controller device */ spi2 = &spi_2; /* SPI2 controller device */ i2c5 = &i2c_5; /* I2c5 cntroller device */ //i2c3= &i2c_3; /* I2C3 controller */ i2c1= &i2c_1; /* I2C1 controller */ i2c2= &i2c_2; /* I2C2 NFC qup2 device */ i2c4= &i2c_4; /* I2C4 controller device */ i2c6= &i2c_6; /* I2c6 cntroller device */ };增加spi2 = &spi_2; /*SPI2 controller device */,同时注释掉i2c3 =&i2c_3;,且去掉msm8909-qrd-skue-cb03.dtsi文件下i2c_3相关的信息
增加SPI2控制器设备节点信息
spi_2: [email protected] { /* BLSP1 QUP3 */ compatible ="qcom,spi-qup-v2"; #address-cells = <1>; #size-cells = <0>; reg-names ="spi_physical", "spi_bam_physical"; reg = <0x78b7000 0x600>, <0x78840000x23000>; interrupt-names ="spi_irq", "spi_bam_irq"; interrupts = <0 97 0>,<0 238 0>; spi-max-frequency =<19200000>; pinctrl-names ="spi_default", "spi_sleep"; pinctrl-0 =<&spi2_default &spi2_cs0_active>; pinctrl-1 = <&spi2_sleep&spi2_cs0_sleep>; clocks = <&clock_gccclk_gcc_blsp1_ahb_clk>, <&clock_gccclk_gcc_blsp1_qup3_spi_apps_clk>; clock-names ="iface_clk", "core_clk"; qcom,infinite-mode = <0>; qcom,use-bam; qcom,use-pinctrl; qcom,ver-reg-exists; qcom,bam-consumer-pipe-index =<8>; qcom,bam-producer-pipe-index =<9>; qcom,master-id = <86>; };
For latest detail please follow /kernel/Documentation/devicetree/bindings/spi/spi_qsd.txt
这里说明下SPI2的2指SPI控制器对应的总线号,对应spi_maste结构体的成员bus_num。
4.2 kernel\arch\arm\boot\dts\qcom\msm8909-pinctrl-cb03.dtsi增加SP2控制器引脚控制设置。
Pin控制的文档可参考/kernel/Documentation/devicetree/bindings/pinctrl/msm-pinctrl.txt
spi2_active { /* MOSI, MISO, CLK */ qcom,pins = <&gp0>, <&gp 1>, <&gp 3>; qcom,num-grp-pins =<3>; qcom,pin-func =<1>; label ="spi2-active"; /* active state */ spi2_default:spi2_default { drive-strength= <12>; /* 12 MA */ bias-disable =<0>; /* No PULL */ }; }; spi2_suspend { /* MOSI, MISO, CLK */ qcom,pins = <&gp0>, <&gp 1>, <&gp 3>; qcom,num-grp-pins =<3>; qcom,pin-func =<0>; label ="spi2-suspend"; /* suspended state */ spi2_sleep: spi2_sleep{ drive-strength= <2>; /* 2 MA */ bias-pull-down; /* pull down */ }; }; spi2_cs0_active { /* CS */ qcom,pins = <&gp2>; qcom,num-grp-pins =<1>; qcom,pin-func =<1>; label ="spi2-cs0-active"; spi2_cs0_active:cs0_active { drive-strength= <2>; bias-disable =<0>; }; }; spi2_cs0_suspend { /* CS */ qcom,pins = <&gp2>; qcom,num-grp-pins =<1>; qcom,pin-func =<0>; label ="spi2-cs0-suspend"; spi2_cs0_sleep:cs0_sleep { drive-strength= <2>; bias-disable =<0>; }; };4.3 kernel\arch\arm\boot\dts\qcom\msm8909-qrd-skue-cb03.dtsi增加SPI2控制器挂载的SPI从设备节点信息
[email protected] { [email protected]{ compatible= "nxp,lpc1114";//挂载的是NXP厂家的lpc1114设备 reg= <0>; spi-max-frequency= <1000000>; qcom,psam_en_gpio= <&msm_gpio 23 0>; }; };
[email protected]择的SPI从设备,对应struct spi_master结构体成员num_chipselect。那为什么我们是用cs0呢。先来看我们用的SPI控制器对应的引脚

图4
这里CS_N的N为什么是0呢?再来看下图:

图5
我们可知BSP1~3都可以通过扩展的CS1、CS2和CS3来片选SPI从设备,当然还有CS0,也就是说BSP1~3对应的SPI0~SPI2控制器,每个都可以支持多达4个SPI从设备,BSP4~6只能挂接1个SPI从设备,只能通过CS0来片选。
5. 驱动代码控制
5.1 PSAM_EN控制
新建PSAM电源控制的结构体
struct psam_control_data { /*system */ structspi_device *client; /*dtsi */ intpsam_en_gpio;};在spidev_probe()函数中默认初始化PSAM_EN为低电平,控制代码如下:
static bool parse_psam_control_dtsi(structdevice *dev, struct psam_control_data *psam_data){ //enumof_gpio_flags dummy; structdevice_node *node = dev->of_node; intret; psam_data->psam_en_gpio= of_get_named_gpio_flags(node, "qcom,psam_en_gpio",0, NULL); if(psam_data->psam_en_gpio < 0) { returnERR_PTR(psam_data->psam_en_gpio); } else{ ret= gpio_request(psam_data->psam_en_gpio, "psam_en_gpio"); if(ret < 0){ pr_err("Failedto request psam_en_gpio, ERRNO:%d", ret); gotofree_gpio; } gpio_direction_output(psam_data->psam_en_gpio,0); } free_gpio: gpio_free(psam_data->psam_en_gpio); returntrue;}在PSAM应用程序打开的时候,应用层通过ioctl(fd, SPI_IOC_SPI_IOC_ENABLE, &sam_enable)来控制上电,对应调用spidev.c下的spidev_ioctl(),增加case
case SPI_IOC_SPI_IOC_ENABLE: retval= __get_user(tmp, (u8 __user *)arg); if(retval == 0) { psam_power_control(tmp); } break;在spidev.h增加SPI_IOC_SPI_IOC_ENABLE定义如下:
#define SPI_IOC_SPI_IOC_ENABLE _IOW(SPI_IOC_MAGIC, 5, __u32)psam_power_control()函数的源代码如下:
static bool psam_power_control( bool on){ intret; psam_control->psam_en_gpio= of_get_named_gpio_flags(psam_control->client->dev.of_node, "qcom,psam_en_gpio",0, NULL); if(psam_control->psam_en_gpio < 0) returnERR_PTR(psam_control->psam_en_gpio); else{ ret= gpio_request(psam_control->psam_en_gpio, "psam_en_gpio"); if(ret < 0){ pr_err("Failedto request psam_en_gpio, ERRNO:%d", ret); gotofree_gpio; } gpio_direction_output(psam_control->psam_en_gpio,on); } free_gpio: gpio_free(psam_control->psam_en_gpio); returnret;}5.2 SPI从设备节点属性compatible要和spidev.c下的spidev_spi_driver保持一致
同时参考2.3部分
static const struct of_device_idspidev_dt_ids[] = { //{.compatible = "rohm,dh2228fv" }, {.compatible = "nxp,lpc1114" }, {},}; MODULE_DEVICE_TABLE(of, spidev_dt_ids); static struct spi_driver spidev_spi_driver= { .driver= { .name= "spidev", .owner= THIS_MODULE, .of_match_table= of_match_ptr(spidev_dt_ids), }, .probe= spidev_probe, .remove= spidev_remove, /*NOTE: suspend/resume methods are notnecessary here. * We don't do anything except pass therequests to/from * the underlying controller. The refrigerator handles * most issues; the controller driver handlesthe rest. */};5.3 CPOL和CPHA极性设置
我们用CPOL表示时钟信号的初始电平的状态,CPOL为0表示时钟信号初始状态为低电平,为1表示时钟信号的初始电平是高电平。另外,我们用CPHA来表示在那个时钟沿采样数据,CPHA为0表示在首个时钟变化沿采样数据,而CPHA为1则表示要在第二个时钟变化沿来采样数据。内核用CPOL和CPHA的组合来表示当前SPI需要的工作模式:
CPOL=0,CPHA=1 模式0
CPOL=0,CPHA=1 模式1
CPOL=1,CPHA=0 模式2
CPOL=1,CPHA=1 模式3
我们这里SPI从设备CPOL和CPHA采用的是模式1,所以我们SPI控制器也采用模式1。
module_init(spidev_init);
spidev_init()相关代码如下:
if (busnum != -1 && chipselect !=-1) { structspi_board_info chip = { .modalias = "spidev", .mode = spimode, .bus_num = busnum, .chip_select = chipselect, .max_speed_hz = maxspeed, }; structspi_master *master; master= spi_busnum_to_master(busnum); if(!master) { status= -ENODEV; gotoerror_busnum; } /*We create a virtual device that will sit on the bus */ spi= spi_new_device(master, &chip);
5.4
6. SPI测试代码
在kernel\Documentation\spi文件夹下就是SPI测试程序,其中spidev_test.c是用于测试自发自收的。我在system\extras下新建spi文件夹,并把spidev_test.c拷贝到spi文件夹下,并创建一个Android.mk文件,内容如下:
LOCAL_PATH := $(call my-dir) include $(CLEAR_VARS)LOCAL_MODULE := spidev_testLOCAL_SRC_FILES := spidev_test.cLOCAL_MODULE_TAGS := optionalinclude $(BUILD_EXECUTABLE)
然后进入此spi目录下用mm命令编译生成的可执行文件spidev_test在out\target\product\msm8909\symbols\system\bin目录下。然后我们可以通过adb push命令把此文件拷贝到设备某个目录下用./spidev_test执行,如果提示权限不够,就用chmod 777 spidev_test命令。
用此程序可以测试spi设备驱动是否正常,但是否能够正常驱动SPI从设备还需要根据具体的从设备来增加对应的控制。
7. 遇到的问题及解决
7.1 /sys/class/spi_master下找不到spi2
把kernel\arch\arm\boot\dts\qcom\msm8909-cb03.dtsi的i2c3 = &i2c_3注释掉就可以看到了
aliases { … //spi0 = &spi_0; /* SPI0 controllerdevice */ spi2= &spi_2; /* SPI0 controller device */ i2c5 = &i2c_5; /* I2c5 cntroller device */ //i2c3 = &i2c_3; /* I2C3 controller */ i2c1= &i2c_1; /* I2C1 controller */ i2c2= &i2c_2; /* I2C2 NFC qup2 device */ i2c4= &i2c_4; /* I2C4 controller device */ i2c6= &i2c_6; /* I2c6 cntroller device */ };7.2 /sys/class/spidev下看不到SPI2控制器下挂载的SPI从设备
(1) Spidev.c下修改
static const struct of_device_idspidev_dt_ids[] = { //{.compatible = "rohm,dh2228fv" }, {.compatible = "nxp,lpc1114" }, {},};(2) kernel\arch\arm\boot\dts\qcom\msm8909-cb03.dtsi的spi_2: [email protected]
[email protected] { [email protected]{ compatible= "nxp,lpc1114"; reg= <0>; spi-max-frequency= <1000000>; qcom,psam_en_gpio= <&msm_gpio 23 0>; }; };
只要这两个地方的名字一样就可以。
7.3 应用层open()设备/dev/spidev2.0失败
在system\core\rootdir\ init_CB03.rc增加下面的内容来修改权限
chmod 0666 /dev/spidev2.0
7.4 应用层用write()和read()测试自发自收失败
用系统自带的spidev_test采用的ioctl方式测试自发自收可以,但用write()写返回值却是0,正确的应该是返回我们实际写入的字节数,目前原因不知道,相关的帖子:http://bbs.csdn.net/topics/391858635?page=1#post-400571674。
没办法我们PSAM的API层只能改用ioctl的方式就可以了。
7.5 SPI工作频率过低
通过PSAM的API我设置SPI控制器工作的频率为200kHZ,SPI控制器的spi_qsd提示频率过低,改为1MHZ就可以了。
7.6 TDA8007给PSAM卡上电失败
用我们实际的PSAM程序测试,根据调试信息可知选卡槽命令正常,但是给PSAM卡供5V电的时候一直没有数据回来,后来查明是
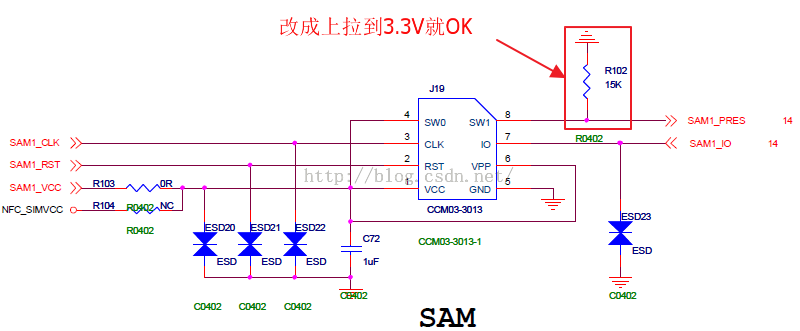
图6
把SW1的下拉改为上拉到3.3V就可以了。
SPI数据传输参考:
http://blog.csdn.net/droidphone/article/details/24663659