�ر���������ϵ������LiAnLab.org����Ȩ���У�ת����ע������������ϵLiAnLab.org����Android�������������ʦ����ϵ�����½���������:@�α���Barry
���������ģ����ǽ��´ӹ��Ŀ��ơ����ܽӿںͿ���ֲ�ԵĽǶȷֱ����AndroidϵͳΪӦ�ó����ṩ��֧�ţ���������Ϊ��ϵ�����µ����һƪ��
ǰ��عˣ�
AndroidӦ�ó����Լ���������˼�����������1��
AndroidӦ�ó����Լ���������˼�����������2��
AndroidӦ�ó����Լ���������˼�����������3��
AndroidӦ�ó����Լ���������˼�����������4��
1.5 ���Ŀ���
��Ƕ��ʽ�����������������������ȡ�����ϵͳ������Ҫ�Ĺ���Խ��Խ���ӡ���ȫ������Խ��Խ�ߣ������Ҫ��ǿ��Ĵ�������֧�֡�������ʽ��ʵʱ����ϵͳ�û�н��̸������Ҫ�����ڴ�֧�֣���ʱ������дһЩ��Ӧ�ã�����Ҫ�����������ڴ涼�dz�С����һ������֧�������ڴ��ϵͳ��������Ҫ��Ӳ��������������������ɱ����ǣ���һЩ�������ֻ�ƽ̨�����Գ�Ϊһ̨�������ֻ�����������һ��Linux����ϵͳ�������ѡ������Ų���ϵͳ������ǿ��������֧�ֵ�Ӳ���ֵ�������������ʹ�ø������Ļ��ʹ�ø������ڴ桢֧�ָ��������оƬ����Щ������ǿ��ͬʱ��Ҳ��һ���Ӿ��˵��������ġ���Ȼ����оƬ������������������ս����Ƴ̣�����оƬ�ڲ���д��ʱ���ŵ�·�ߴ磩���������Ѿ��ӽ��������ϵļ��ޣ�40���ס�28���ס�22���ף������dz�����Ƹ�����оƬΪĿ�ĵģ�����˫�ˡ��ĺˡ��Լ�Խ��Խ�ߵĹ���Ƶ�ʣ���ʵ�ϣ��������ⲻ��û�н��ͣ�������һ�����Ӿ��ˡ�
�������Խ��Խ��Ĺ����ϵ���ս��Android������ϣ������ڿ��������������֮ǰ������ע���Ŀ������⡣Android������ϵ�һЩ�ص㣬ʹϵͳ����Ҫ�Ĺ���Ҫ���ڴ�ͳ��ƣ�Android��ʹ��Java����ִ�л����ģ������������֮�����еĴ��붼��Ҫ�������������ʹ�û�����������Ҫһ��ָ��ĵط����������������ִ���������Ҫʮ����ָ�������α������ͬ��Android����ʵ������ģ�����������ζ����ͬһʱ�̻��и������������У�Android�ǹ�����Linux�ں�֮�ϵ�ϵͳ��Linux�ں��������ϱ�����ѣ��ڹ��Ĵ��������Ƕ̰壬����PC������˵��Linux�����滷���ڹ��Ŀ����ϴ���������������ϵͳ��MacOS����Windows��
��Ȼ����ʱû����ʷ������Ҳδ�ؾ��ǻ��£�����Linux�ں��ڹ��Ĺ��������û������ã����ǾͲ�����Linux�ں˻��������ģ�Android����ͨ���µ���������й��Ŀ����ϵ����������ڸ�ǰ��������˵���Ŀɼ�С��Linux�ں������ԡ���ǿϵͳ����ֲ�Ե�����������Dz��ɱ���ģ����Ŀ��ƽ��ᾡ���ܶ�ر��Ƶ�ϵͳ���ϲ㡣������ǰ����ڰ�ȫ�Եķֲ��п��Կ�����Android�൱�ڰ���������ϵͳ�����û�̬���������һ�Σ�SystemServer���ϵͳ�������൱���û�̬��һ��Linux�ںˣ����ǽ����Ŀ��Ƹ���س鵽�û�̬��ִ�У�Ҳû��ʲô�������ġ�
��Android������ϵͳ�������Ŀ��ƻ��ȴ�Ӧ�ó������֣�ͨ����������ʱ��С����Ҫ�Ŀ�����ʼ��������ϵͳ�����Ψһ֪����ǰϵͳ�Թ����������SystemServer�����ǿ���ͨ����Ӧ�İ�ȫ�ӿڣ������ĵĿ�����ȡ����������SystemServer�����к����Ĵ�����Androidϵͳ�����ٵ����л����������Դ�Ǽ���������Դ�����ǹ��Ŀ���Ӧ���DZ����͵ģ��������������رղ���Ҫʹ�õĵ�Դ�������Ȼ�����ص磬���������ijЩ����оƬ������������������оƬ��������Ҫ��С��Χ�ġ����������ܲ��ֵ���Ʋ�ͬ����Ȼ���ǹ��Ŀ�����ͨ������������ʵ�֣��������������Ҫ��������Ҫ���ľ�����С�����ṩ����ֲ�ԡ�
�������ķ��������Ҫ����ĵ�Ȼ�����Ƕ������������ǿ��Եõ��ľ������ǵ��������ڡ���ν���������ڣ��Dz��ǽ���ֻ���ṩ����һЩ����ϵĻص��ӿڶ����أ�������ˣ����ǵ���ν����������һ������״̬�㣬����������߲���ʱ�����л�������������á���������ṩ��̹��ܣ����ǿ��Բο�JAVA ME�����Ӧ�ó���ʵ�֣�
JAVA ME�����Դ�Ӧ�ó���ֻ������״̬�㣬���С���ͣ���رգ���Ӧ�ṩ���ֻص��ӿھͿ������������ֱ��ģ�͡������ǵ�Android�������������ģ�Android�ڱ��ģ���ϣ��Ѵ���ʾ�벻����ʾ�Ĵ������ֱ�����Activity��Service��ÿ�ֲ�ͬ��ʵ�ֶ�������ص��������ڣ��Ը��õ����뵽ϵͳ�ĵ�Դ��������
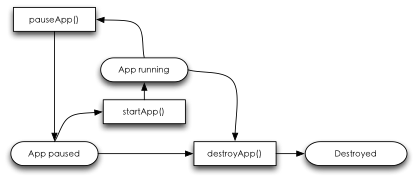
�����ǵ�����ʾ��صĴ�����Activity����ӵ��6�ֲ�ͬ״̬��

���IJ�ͬ�������ڽΣ�ȡ������һActivity�Ƿ��ڽ���״̬���Ƿ����ɼ�״̬�����������������������������Activity��������������Ϊ������״̬����Ƶġ�onResume()��onResume()�ֱ��ǽ��뽻�����˳�����ʱ��״̬�㣬��onResume()ִ����֮����ʱϵͳ�����˽���״̬��Ҳ����Activity��Running״̬������ʱ�������Activity�������û�����һ��Activity����ִ�У�����һ��С�Ի���ʹԭ������Running״̬��Activity����ס����ʱActivity�ͱ���Ϊ����Ҫ�����ˣ���ʱActivity���벻�ɼ���״̬������onPause()�ص���onStart()��onStop()���Ƕ�Ӧ���Ƿ�ɼ�����onStart()�ص�֮��Ӧ�ó�������Ϳ��Ա���ʾ�������������������뽻���ڣ���Activity�����ȫ���ɼ�֮����ᴥ��onStop()����Android�Ķ�����ʵ�֣�������ɽ��̻ᱻɱ����������Ҳ�ṩ����onCreate()��onDestroy()���ֻص��������ṩ���̱�����֮������̱�ɱ��֮ǰ�����ֲ�ͬ������

������Ƶļ������ڣ���Activity���ڿɽ���״��ʱ������ϵͳ���ȫ����ִ�е����ڡ�����������һ��״̬�ڣ�ֻ�Ǵ��ڿɼ������ɽ���״̬ʱ�����ǾͿ��Կ�ʼͨ�����ɽ������ˣ������ʱ���治��ˢ�¡����Թر�һЩ�������û�������ص�Ӳ������Activity�ٽ�һ���˳��ɼ�״̬ʱ�����Խ�һ���˳�����Ӳ���豸��ʹ�ã���ʱ�Ϳ���ȫ�ص��ˡ���дӦ�ó���ʱ��������ϣ�����в�һ���ı���ʱ�����ǿ���ȥͨ��IoCȥ���ظ��Dz��Ľ���Щ�ص��ӿڣ����������ֱ���ģ���������ǵ��������Ǿ�ʲô������Ҫ�ã��Զ��ر����ֿ��������������
��Ȼ������ģ��Ҳ���������е���������ںܶ�Ӧ�ó�����˵���ں�̨���ɼ�״̬�£���Ȼ��Ҫ��һЩ�ض��IJ���������Android��Ӧ�ó���ģ�����������һ��Service������һЩ�����ɵĿ����ߣ��Ƚ�ϲ��ʹ�ú�̨�߳���ʵ��������������ʵ����Android������ѧ����Ϊֻͨ��Activity���صĺ�̨�̣߳��п��ܻᱻɱ����������״̬��������ʱ����̨�߳���Ҫͨ��Activity�ػ���棬ʵ��������Ҳ���ƻ�Android�ڹ��Ŀ����ϵ����ֺ�������ơ��ȽϺ��ʵ����������в������桢��Ҫ�ں�̨��������ijЩ������ʵ�֣�����Ҫʹ��Service��ʵ�֣���״̬��ʾ�ĸı�Ӧ������onStart()����ɵģ�״̬�ϵĽ�������Ҫ�ŵ�onResume()�����������ʵ�ֿ�����Ч�ƿ����̱�ɱ�������⡣���������Ǻ������AIDL�IJ��֣������Կ���������ʵ�ֻ����Լ�ǿ��̨����Ŀɽ����ԣ������ǽ�һ����Serviceͨ��AIDLת����Remote Service֮�������ǵ�ʵ�ֻ�߱�ǿ��Ŀɸ����ԣ�������̶����Է��ʵ���
ServiceҲ�������������ڣ���Service������������Զ���Ҫ�ö࣬��Ϊ������������ֻ���ڡ��Ƿ����ڱ�ʹ�á������𡣵�Ȼ��ͬ������Android�Ķ�������ƣ���ʹ���С����״̬֮�⣬Ҳ���н����Ƿ���ڵ�״̬��
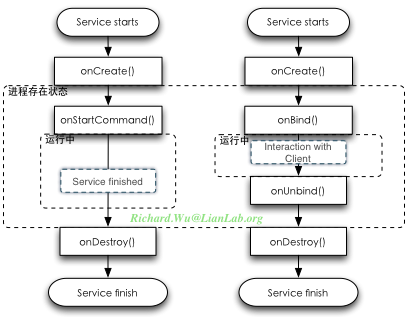
���ǣ����ǵ�ServiceҲ�ɱ����뵽���ִ����Ծ״̬���ܿػ��������Dz���Ҫ���̨��Service������������ʱ�����ǿ���ֻ��ͨ��һ��startService()����Intent����ʱService��ִ������Ӧ�Ĵ���������ֱ���˳����������һ��AIDL��ʽ�׳���Remote Service�������Լ����̷�Χ�ڵ�Service����ʹ��bindService()�����˽�������ʱ��Service������״̬��ֻ����onBind()��OnUnbind()�ص�����֮�䡣
�����ǵ�Ӧ�ó���ĸ��ֲ�ִͬ���������Ǵ���һ���ɿ�״̬��ʱ����ʱ�����ǵĹ��Ŀ��ƾͿ��Ա����е�һ��ϵͳ���̵�SystemServer����ɡ���ʱ����������һ������ϵ�ѡ����Ĭ���ṩһ����ɢ�ĵ�Դ���ƣ���Ӧ�ó����ܶ����ɵؿ��Ƶ�Դʹ�ã������ṩһ����格����Ĭ�������ʵʩ��格�ĵ�Դ���������ֻ����Ӧ�ó�����������������������������Ȼ��ǰһ�ַ�ʽ�������ڵ�Դ�������ԣ���ʱAndroidϵͳ��ʹ���˵ڶ������������ܶ����格��Դ������ơ�
��Ĭ������£�Android�᳢����ϵͳ�����ܶ�ؽ��뵽����״̬֮�С��ڴ��û���ʼ���������һ�ν���֮��ϵͳ��ᴥ��һ����ʱ������ʱ������һ����ʱ������ʱ����ÿ���û��Ľ�����������������һ��ʱ��������û�һֱû�н��еڶ��ν�������ʱ����ʱ��һЩ���Ŀ��ƵIJ����������һ�������ȱ䰵ֱ���ر�ϵͳ����Ļ������ں�����һ��ʱ�����û�����û���κβ�������ʱϵͳ����һ�����Խ�����ϵͳ�������״̬��
���߲��ֵIJ�������������Linux�ں˵Ĺ��Ŀ������ˡ����߲�������Ὣ�ڴ�����������ˢ��ģʽ���ص�CPU�������ֵ�������ģʽ֮�£���ʱϵͳ���Ļή����ͣ�����Dz���3Gģ���оƬ����������Ӧ�ô���1mA���¡������ǵ�ϵͳ���ֻ���һ��2G��3G������4G�DZ�����ڵģ����Ҵ���״̬ʱ�ص����ֲ�ͬ������ʽ�µ�Modem��Ҳʧȥ���ֻ����ڵ����壬���ǣ�һ�㹦���ϻ����һ���ƶ�Modem��רҵ�����ǻ�����Baseband���Ĺ��ģ���ʱһ��Ҫ������10 �C 30mA�Ĵ���������100mW���ҵĴ������ġ������ʱ���û���ЩijЩ���ڻ��ѵİ��������ǻ���оƬ�Ϲ�����һЩ���Ż��ǵ绰֮�����Ϣ����ϵͳ��ͨ�����Ѳ������ص�����֮ǰ��״̬��
����Linux�ں˵�Suspend��Resume�����������ACPI��ͨ�ü��㻷�������ǵ�PC���ʼDZ������������Ĺ��Ŀ��Ʒ�����������ȫ���ֻ���ʹ����������ϡ���Linux�ں���ȱʧ�ģ���Ҫ��UI�����Ϲ��Ĺ������ֻ�ƽ̨�Ϻĵ�����Ԫ����������Ļ�뱳�⣬����ͨ��Linux�ں˵�suspend/resume����ģ����ʵ�ָ�Ч�ĵ�Դ���������ǣ�Androidϵͳ����ԭʼ��suspend��resume�ӿ�֮�⣬������������early_suspend��late_resume������UI����ʱ����ǰ���ߡ�
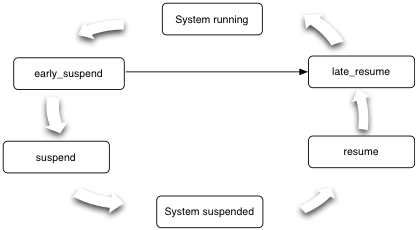
���ǵ�Androidϵͳ���ڳ����û�������ʱ������£����Ƚ���early_suspend״̬�㣬�ر�һЩUI������ص�Ӳ���豸��������Ļ�����⡢��������Sensor������ͷ�ȡ�Ȼ���ڽ�һ��û����Ӧ���Ѳ���ʱ�������suspend�ر�ϵͳ����������Ӳ�������ϵͳ���뵽�ڴ���ˢ�¡�CPU�ص��״̬�������ϵͳ��ȫ���ߵ�����£�������ij�ֻ����¼�������绰����������š������û����˵�Դ������ʱ�ͻ��Ƚ�resume������UI��������ص�Ӳ�����ѣ��ٽ���late_resume������UI������ص�Ӳ����������豸�ڽ���early_suspend״̬����û�п�ʼsuspend����֮ǰ�����˻����¼�����ʱ��ֱ�ӻ��ߵ�late_resume������UI������Ӳ���������Ӷ��û��ֿ��Կ�����Ļ�ϵ���ʾ�����ҿ��Խ��н���������
�������������ģ���û���û�����������£�ϵͳ��Ͻ�������ģʽʡ�磬���û���������ܵ����ֱ仯����Ƶ������ʱ��ʵ���������뻽��ֻ�ǿ�������UI���Ӳ���������뻽�ѡ�����ȫ�����͵�����Ҳ��������⣬����������ЩӦ�ó���QQ��Ҫ���ֵ�¼��������Ҫһֱ�ں�̨���أ���Щ��������Android������ģ����ǣ����ǻ���Ҫһ�ֻ��ƣ���ijЩ�����Ӧ�ó��������ѵ�����£����ǻ��ǿ��Ե���ЩӦ�ó����㹻�Ĺ������е���ȥ��
����Android������ϣ��������һ�״��¿�ܣ�wake_lock���ڶ����early_suspend��late_resume֮�⣬�ټ��Ͽ����ṩ�����ϵ�������ơ�Wake_lock�����ƣ�������C++��ʹ�õ�����ָ�루Smart pointer������������ָ���˼������Ƶ�Դ��ʹ�úͷ��䡣����Ҳ֪��Smart Pointer�������ã����������ü������Զ���1��ȡ�����������ü�����1��ʹ��������ָ��Ķ����������ü���Ϊ0ʱ����ö���ᱻ���յ���ͬ�������ǵ�wake_lockҲ����ʹ�ü�����ֻ�������֡�����ָ�롱����ʹ�õ���Դ�������ڴ棬���ǵ�����Ӧ�ó����ͨ���ض���WakeLockȥ����Ӳ����Ȼ��Ӳ����������ü����Ƿ�Ϊ0�������Dz�����Ҫ�ر���һӲ���Ĺ��硣
Suspend��wake_lock�������¼���Ļ��ƣ����Ҳ����Ҫ�ӷ�SystemServer����������Ϊ��������ϵͳ���ķ�����Ҫ��Ȩ���ܱ�֤��ɳ�С����ơ����ǣ����ǵõ���Android��ĵ�Դ������ܣ�
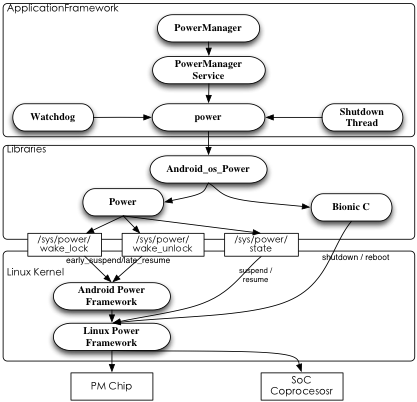
��Ȼ������Ψһ��̫�õĵط�������Androidϵͳ��Ʊ����Linux�ں�ԭ�еĵ�Դ�������ƽ��иĶ�����Ҫ����wake_lock���ƵĴ�����Ҳ��Ҫ��ԭʼ���ں�����֮�ϼ����µ�early_suspend��late_resume�����µĵ�Դ����������wake_lock�����ס��ⲿ�ֵĴ��룬������Androidϵͳ����Ҫ�����������Linux�ں˵�����������ȫƥ�䣬ͬʱ���ֱּ��ķ�ʽ��Ҳ���ƻ����ں�ԭ�е�������Ҫ�ķ�格���ⷽ��Ҳ�����Linux������Android����֮����һ�ȳ��ú��ף�Linux�ں˾ܾ�Android�ύ���ģ���AndroidԴ��������ʹ�ñ���Linux�ں�Դ���룬ʹ���Լ�����ķ�֧���п�����
����������Androidϵͳ���ڹ��ܽӿڵ���ơ�
1.6 ���ܽӿ����
����ʵ��һ��ϵͳ�����뾡���ܶ���ṩ��Ӧ�ó����ܶ�Ŀ����ӿڣ���Ϊһ����Դϵͳ��Ӧ����ˡ���Ȼ����ǰ���ᵽ�ˣ�������Ҫ��Ȩ���ƻ���������Ӧ�ó���ɷ���ϵͳ������Ӳ�����ܣ���������Ȩ���ƵĽǶȣ����Ӧ�ó���õ�����Ȩ��Ӧ����������ʹ����һ���ܣ�һ���ܹ��������Ȩ��Ӧ�ó�����������ȻӦ������ϵͳ�����ṩ��һ�й��ܡ�
����һ������Javaϵͳ�����������滷����ʹ�õ�Java SE����Ƕ��ʽ������ʹ�õ�Java ME�����������κ����⣬��Ϊ��ʱJava����ֻ��ϵͳ��һ�㡰Ƥ����ÿ��Javaд�ɵ�Ӧ�ó���ֻ��һ��ײ�ϵͳ�ϵĶ��η�װ��ʵ���϶��ǽ��õײ����ϵͳ����ɷ�������ġ����ڴ�ͳ��Ӧ�ó���һ��main()������ѭ������UI��Ҳ������������⣬ͨ�����ӵ�ϵͳ��Ķ�̬���ӿ����ֱ�ӷ����豸�ļ���Ҳ����ʵ�֡��������ķ�ʽ������Androidϵͳ��ͻ�����һ�����ܽӿڵIJ�����⡣��Ϊ���ǵ�Android��������һ�����ϵͳ֮�ϵ�Java�������װ�����dz�����������û�̬��ת�IJ���ϵͳ��ͬʱ�����С�ɳ�С�ģʽ��Ӧ�ó�������ӵ������Ȩ��������ϵͳ��Դ�����ֲ���Ӱ�������������С�
���ǣ�����Android�ڹ��ܽӿ�����ϣ��ᱻ���ֳ�������εģ�һ�����ԡ����йܡ�������ͨ��һ��ϵͳ����SystemServer��ִ�У���һ���DZ�ӳ�䵽Ӧ�ó���Ľ��̿ռ�������ɡ�������ǰ�������ʹ��Java������ԣ���Framework�㹦��ֻ��API��ʽ�����ṩ���ʽӿڣ��ͱ�÷dz���Զ����ʹ����Java���ԣ������Ǹ�����ʵ�ִ���ṹ�ϵ��ع���������ǵĹ��Ľӿ��б䶯�������ͨ�����ʽӿڵ��ع������ص������IJ����ԣ�ֻ��Framework��API�汾Ϊ����֧��Ӧ�ó������һ���ṩ��װ���ھ�������£���Ȼ���ǵײ�ṹ�Ѿ������˾�䶯��Ӧ�ó���ȴ��ȫ����Ӱ�죬Ҳ����֪���������ı仯��
���������˼·��������ȥ��Android�Ľ���ģ�ͣ����ǾͿ��Կ�����ͨ�������ϵ�Framework��ʵ���ϱ���ֳ������֣�һ���ֱ�Ӧ�ó�����Javaʵ�ֵ�classes.dex�����ã��ⲿ�������ṩӦ�ó�������������Ĺ��ܣ���һ���֣����������ǵ�SystemServer�������ṩ��
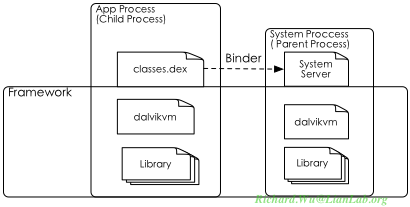
��Ӧ�ó���ֻ��Ҫ��ɻ����Ĺ��ܣ�����ֻ��ʹ��Activity������ͼ�ν���ʱ��ͨ��Activity�����������û�ʹ�õ�һЩ����ʱ����ʱ��ͨ���Լ����̿ռ���ӳ��Ĺ�������ɡ������Ҫʹ��һЩ����ܣ����绰�������ţ�����Ҫͨ��һ�ֿ����ͨѶ���������ύ��SystemServer����ɡ�
��������������ƶ��õ�������ģ�ͺ���Ҫ��Ҳ��Androidϵͳ�б�������ϵͳ����Ҫ��һ�����������Ŀ����ƣ�ʹAndroid�봫ͳLinux�������ٵ���������������ƽǶȾ��������
������ʾ���������Ǵ�ͳ��Ƕ��ʽ�����Ҫ�����Ǽ�Framebufferֱ�����У�Ҫô�����ͨ����ʹ��һ��DirectFB����ʾ���������������ַ���ͨ���Ժܵͣ���ȫ�Լ��Ϊ�˴ﵽ��ȫ�ԣ�ͬʱ���ܾ����ܼ��ݴ�ͳ���滷���µ�Ӧ�ó��ᴫ�����滷�����һ��Xorg����ʾϵͳ������Meego���Լ�Meego��ǰ��Maemo������ʹ����Xorg��������ͼ�Ρ���Xorg�и������ص��������⣺
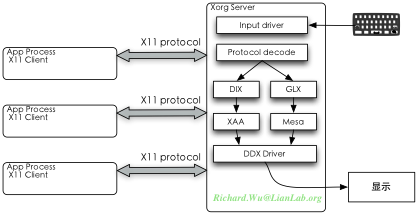
ʹ��Xorg������ʾ�ģ����е�Ӧ�ó���ʵ����ֻ��һ���ͻ��ˣ�ͨ��Unix Socket��ʹ��һ���봫ͳ���ݵ�X11������Э�顣�û�������Ӧ�ó�������Լ��Ľ���ѭ���ͨ��X11�������ڵ�����֮��Ľ��������ͨ�������豸��ȡ�����¼�����ͨ��Xorg��������ת�ؿͻ��ˣ���Ӧ�ó�������ϵ��ػ���������ǻ�ͨ��X11Э�飬�ص�Xorg Server֮���ٽ������Ļ������������Ȼ��������ʹ�õľ���ģ�黯������Ƶ�XorgR7.7���Ѿ�������ͨ��Ӳ��������������ֲ�����Xorg�����������п��ܻ��Ϊ����ͼ�ν�����ƿ��������Ҫ���Ǹ��Ӷ�̫�ߣ������ֹ�������һ��bug���е����ѣ�����Ҫ˵�Ľ�����Ƕ��ʽƽ̨�ϸ�����ˣ����ܱ��Ͳ�����ϵͳ������Xorg��ȱ�ݱ�¶���ƣ�����ʹ��Xorg��Meego���¹���Զ��AndroidҪ���ѣ��û���������Ҳ�Ƚϲ
��Android�����ģ�������ͳ��Xorg���ܺܲ�һ��������ƽǶ�����������ͼ�ν������ȡ�����豸�����������¼�����������Ҫ��Xorg�������пط�������������Android���л����������������ڶര�����⣨�ര�ڵ�ϵͳ��Ҫ�и������������ĸ����ڴ���ǰ̨���ĸ����ڴ��ڽ���״̬�У�������ʵ�ֵĽǶȣ�����ܹ��ṩһ����ƣ���ͼ�δ�������������ֿ����������ʵ���Ż�����������ͼ�ν���Ľ�����ʵ���Ͻ���������ͬ�Ĺ���ʵ������ɣ�Ӧ�ó�����ͼ����е�����Ⱦ��SurfaceFlinger���Լ����������¼�������ѡ����ʵĵ�ַ���з��͵�SystemServer����Ȼ�����ǵ��ϲ��Ӧ�ó��ῴ���ڲ��ĸ���������ֻ֪��ͨ��android.view��������������е�ͼ�ν������ܡ�
���ǵõ�Androidϵͳ��ͼ�δ�����ܣ�
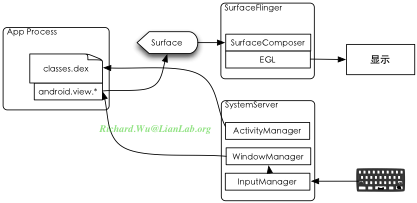
���ǵ�SurfaceFlinger����Android���һ��Native Service��ʵ�֣�������ԭ������˵��ֻҪ��һ����������ִ���壨���̡��߳̽Կɣ����Ϳ�����ϵͳ��ִ�С���ʵ�ֹ����SurfaceFlinger��Ϊһ���߳���SystemServer������̿ռ������Ҳ�ǿ��Եģ�ֻ�dz����ȶ��ԵĿ��ǣ�һ�㽫��������һ��������SurfaceFlinger�Ķ������̡�
������ƣ����Դﵽһ���������Ƶ����ƣ�����ͼ�δ�����ܽ���ø���ͬʱҲ���ὫXorg������Ҫ�����������ں˽ӿ��������䣬����ڱ�IJ���ϵͳ�ں�֮�Ͻ�����ֲ��Ҳ������̫��������ԡ�����ʱ��������ص��������⣬��Ϊͼ��Ĵ������������Ҫ�����ڴ�ģ������24λ���ɫ�������ʹ��800x480�ķֱ��ʣ�ÿ��60������Ƶ�ʣ�Ҳ��Ҫ3*800*480*60 = 69120000��69M Byte/s�������ֿ�������Ƕ��ʽ�������ԣ������Գ��ܵġ��ڽ��̼䴫������ʱ��������Ҫ��һ������ִ�������Ļ�����ͨ��copy_from_user()�����ݴ��û�̬�������ں�̬��Ȼ������һ������ִ�е������Ļ�����ͨ��copy_to_user()�����ݿ������ں�̬��������һ���û�̬�������������ܱ�֤�������š�
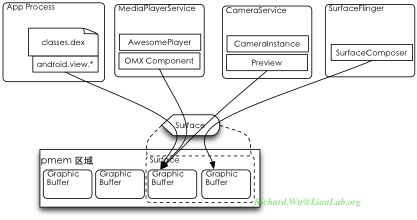
���ع�ͷ����Linux�ںˣ����Linux�ں�̬�����Ķ�֪������Linuxϵͳ�Ľ���֮���С�ڴ濽���Ŀ�������ֱ�ӵ��ֶξ���ͨ��mmap()������ڴ�ӳ�䣬�ñ������ݵ��ڴ�ҳֻ�����ں�̬��ѭ������ʱ��û���ڴ濽�����Ŀ����ˡ�ʹ����mmap()֮���ڴ�ҳ��ֱ�����ں�̬������ڴ棬�������̶�ͨ��mmap()���������ӳ�䵽�Լ����û��ռ䣬Ȼ�����һ������ֱ�Ӳ����ڴ棬��һ�����̾Ϳ���ֱ�ӷ��ʵ�����ͼ�㴦���ϣ������Щ���ں�̬������ڴ��������ڴ棬��ʱ�Ϳ���ֱ��ͨ��LCD��������DMAֱ�������Android�����ṩ��һ���µ���������pmem�������������������ڴ�ķ����������ͬʱ�����ַ�ʽ���㣬��û����ϲ��ṩһ�γ����ʱ�����Ȼ���ߣ�������������������ǵ�Gralloc��HAL�ӿڡ������������ֽӿ�֮��Android��ͼ�����ϱ��Գ���ϵ�����������ڴ�ͳʵ���ˡ�
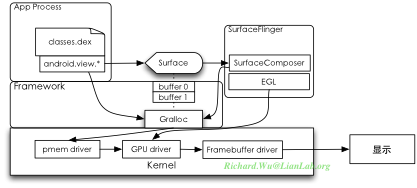
���ǵ�ͼ�㣬����Ӧ�ó����ڴ�����ͨ��Gralloc������ͼ��洢�ռ䣬Ȼ��װ���ϲ��Surface�࣬��Activityʵ����Surface���ǰ���Ҫ�����ػ棨����view��draw()�����������ڻ�����ɺ�ͨ��post()��������ɵ���Ϣ����SurfaceComposerԶ�̶�����SurfaceFlinger��Σ����ǽ��Ѿ�������ɵ�Surfaceͨ�����Ӧ��ģʽ������ͼ��ĺϳɲ��������Ļ�������ϲ�ʵ�֣�ò似��һ�ֺ���ɢ�Ľ����������ڵײ�ʵ�֣�ʵ������һ�ֺܸ�Ч����ˮ�߲�����
���值��һ�����Surface����Ҳ������ͼ�㴦�����ٵ���һ�ּ��ɣ�����double buffer������һ��Surface��������ͼ��buffer��һ���ں�̨�����ƣ���һ����ǰ̨�������������̨������ɺ�ͨ��һ��Page Flipping������ԭ���ĺ�̨�屻����ǰ̨��������������Ʋ���������ں�̨��ɡ������û��ܻῴ������������ͼ����Ϊͼ�����ǻ�����ɺ���������������double buffer��ʹ����ͼ�����������Ҳ�õ�����������������������ʹ�ö�����ѭ����ͨ����ˮ�ӿ���ͼ�㴦����������Android������ж�����Ƶ������֣����ܵ��Խ�һ�����١���Android 4.1���棬����ͼ�δ������Խ�һ���Ż���ʹ����triple buffer�����ػ��壩��������ͼ�㴦������ˮ�߲���������
������ʾ�����ϵ�����ԣ���Androidϵͳ��Ҳ�߱��dz���Ҫ�����壬����������ϵͳ�ڹ�������Ͽ��Ա�ø����������ṩ��һ�֡��㿽����ͼ�㴦������֮�������ϲ㶼����ͨ��һ������Ŀ��Կ���̵�Surface�����������첽�Ļ��ƴ�����������Dz���ֱ�Ӳ����ؼ�������ͨ��������ʽ������ͼ�ν����ϵ�ij������������SurfaceView�ṩ�ģ���Ȼ����ʱҲֻ�Dz���Surface��ijһ���֣������ǵ�Surface�Ļ�����post()�첽���еģ����Ƕ��ִ������Բ��д���ͼ�㣬���û�ֻ�ῴ��ͨ��post()���͵�ͼ�������ɵ�ͬ���¼�֮�������ͼ�㣬ͼ�������������Է������Ը��ѡ����磬���ǵ�VOIPӦ�ó����Ի��漰�������ʵ��Ľ�����Camera����ý�����롢Ӧ�ó���SurfaceFlinger��
Ӧ�ó���ý��������Camera��ֻ��ͨ��һ��Surface�������ں�̨���Ͻ��н�������Ļ��ƣ���ǰ����ͷ�����Ļ��ԣ���������������Զ�˵���Ƶ��Ȼ��Ӧ�ó���IJ����ؼ��������ػ��̨ͼ�㡣�������һӦ�ó�����Activity�Ŀɽ���״̬����ǰ����������ڵIJ��֣����ͻ�ͨ���ҵ�ͬһSurface������һSurface�����ǰ̨�壨Ҳ���ǻ�����ɵ���û�������ͼ�㣩���������������һSurface�����ǰ������ͼ����жԵ���������������ˮ������Ժ�������������ȥ��
Android���������Ч�ķ�������ֻ��һ��ͨ���������ʽ��ȫ������Ƶ�Ƕ��ʽ�����������Ч������Ƶ�һ����Ҫ�ء��������Ч�ʽǶȳ��������̸����ʵʱ����ϵͳ���Ч�����ȿ���ҲС��û����ַ�л�ʱ�Ŀ�������ΪAndroidϵͳ��ͨ��Ŀǰ���ǿ����Ĺ����Խӿڵ���ƣ����ٵõ��������õĹ���Ϊ����ͬʱ�ּ�����ܵ�һ����ơ�
��Ȼ������ǰ�����ܽ�ģ�����Androidϵͳ���������ԣ����յõ���һ��ӡ����ÿ����ƶ������ܽ���ͬһ������ջ��˶��ֵĺô������Dz������ַ�ʽ��ã���Ҷ�Ӧ����ѭ��������ϵ�˼·�뼼�ɣ�That depends��Ҫ���������Android����Ҫ������ʵ��һ����������Ƕ��ʽ���������еģ��������ʽ�ģ������ǻ���ɳ��ģʽ��ϵͳ��Ҫô��õ�Ч�ʲ��ߵĽ��������Ҫô�������ܶ��õ������ڿ�ʽ�Ľӿڡ�Android����Ҳ������ôһ�ڿ�ʽ��ϵͳ�����ϵͳһ����һ������Ϊϵͳ���IJ��ֵ���ƣ����˴˹��������������������в�֡��������Ƕ��ƣ���ʵ�������ѡ���Android����ϵͳ�ĺ��ľ���Framework������ν��Framework������������ѧ��������˵�������Ĺ���ȴ�ǿ��Խ��ܵġ���ν��Framework�������ṩͳһ�ӿڣ�����ϵͳ�ݽ�ʱ������ԣ��������ṩ����װ���ײ�ʵ�ֵ�ϸ�ڡ�Android������ϵͳ�㹹�ܣ���ܺõ�����������ij����������ĽǶȣ�����������Android�Ŀ���ֲ����ơ�
1.7 ����ֲ��
�����ӿ���ֲ�ԽǶ���˵��Linux�ں���Ŀǰ�����Ͽ���ֲ����ǿ�IJ���ϵͳ�ںˣ�û��֮һ��Ŀǰ��ֻҪ������оƬ�ܹ��ṩ��������������������֧�Ŷ�����ڵ����ϵĿ�������ֻҪ�ܹ��ṩC���Եı�������ȷ��˵��Gnu C���빤���������Ϳ�������Linux�ںˡ�Linux�ں�������ϱ����˴�ͳUnix���ص㣬��ʹ����C���Կ��������ٲ��ֻ�����صĴ���ʹ�û�࣬���ֽṹʹ�����ֲ�Ժ�ǿ����Linux�ں˷�չ��2.6�汾֮������ǿ��Ŀ���ֲ�Եõ���һ��������ͨ������ģ����������ܵ�����Ͳ��ϼ�ǿ��ʹLinux�ں������Դ���뼸����û��Ӳ��ƽ̨�ϵ������ԡ����ǣ�Linux�ں˼����ܹ����������е�Ӳ��ƽ̨֮�ϣ������е�X86��ARM������ô����������Ҳ���ڲ�֪��������ʹ�õ�����MIPS��PowerPC��Alpha�������һЩ��������û�������ģ���Blackfin��Cris��SuperH��Xtensa��Linux�ں˶�֧�֣�ƽ̨֧�ֿɲο�linux�ں�Դ�����archĿ¼������������Linux�ں˵Ŀ���ֲ�ԣ�Linuxһ��Ҳ����ΪоƬ��֤�Ĺ��ߣ�оƬ��FPGA��Ƶ����ճ���ǰ������ͨ��Linux�ں��������һоƬ�Ƿ�������У��Ƿ����оƬ����ϵĴ���
������Linux�ںˣ����������ϵIJ���ϵͳ��������ٿɼ̳������Ŀ���ֲ�ԡ���Android�����Ӧ�ó������л����Ķ��γ������û�̬�����ֹ����һ���µIJ���ϵͳ���������Ŀ���ֲ�Զ�����ٻ��ܴ�Ӱ�죬���ң�������ǰ�������������ģ�Android�ĺ��IJ㹹��������Ҳ��Ϊ�����ϵĿ��ǣ������Ҳ�е�ǿ�������ڿ���ֲ��Ҳ��������ս������ɽ��ˮ����������Ϊ��ս������Android����ͨ�����ּ�������ǿϵͳ�����Ŀ���ֲ�ԣ���������Զ������ϵͳҪ�õöࡣAndroid�ڿ���ֲ���ϵ��ص��У�
l ����Ҫ���ƿ���ֲ�ԡ��봫ͳǶ��ʽLinux����ϵͳ��ͬ��Android�����������ȷ�����˼����Ŀ�꣬����Ϊ��ʹ�ø��Դ�������ṩ�������Եı��뻷���������г���������������������������Ҫ�Ŀ�Դ��������Щ��Դ�����ܹ��ṩ�����ӵĹ��ܣ�����Android�����ֻ��ѡ������֤���ı��蹦�ܣ���������BlueZ���������ṩ�����ӵ��������ƣ���Androidֻѡ����BlueZ�Ļ������ܣ����������Android�Լ���ʵ�֣����Ǽ�С�������ԣ�Ҳ��������ֲʱ�ķ����ԡ�
l �����ܿ�ƽ̨������ǰ��ϵͳ��ȣ�Android�ڿ�ƽ̨�ϵ�����Java���Ե�ʹ�ã�ʹ���ƽ̨������ǿ���ڿ����ϼ�������ʹ���κ�Java�����������еIJ���ϵͳ�����Դ���뼶����Ҳ�ܹ���MacOSX��Linux��������б��룬��Ҳ��һ�����ͻ�ơ�
l Ӳ������㡣Android��ϵͳ��Ƶ��������滮��Ӳ������㣬ͨ����Ӳ�����ʽӿڵij���ʹӲ���ķ��ʽӿ�����ȶ����������ʵ������ڵײ㻻�ò�ͬӲ�����ʽӿ�ʱ���ؼ���ʵ�֣���Ҫ˵Ӧ�ó�����Framework��������ʶ�����ֱ䶯��������ǰ��Ƕ��ʽLinux����ϵͳ��û�е�һ���ŵ㡣Ӳ��������ʹ�ã�ʹAndroid����һ����Ҫ������Linux�ں�֮�ϣ�������ײ�͵���ɱ�Ľӿڣ�Ҳ������̫��Ĺ�������
l ʵ�ֽӿ�ͳһ�Ĺ淶����Android�ڹ����ϣ����Ƿ���һ��ͳһ����˼·���ȶ����API��Ȼ�����Framework���ʵ�֣�Ȼ���ٵ�Ӳ��������ϵı䶯��API����ͬһ�汾����չ��FrameworkҲ����ǿ����Ӳ������㱾�����ṩ������ҲԽ��Խǿ������һ�ж�������֯�м��ɵĻ����½��У��䶯���κ�һ�ΰ汾����������������������С��Χ�䶯������������ͨ��Linux��������ʱ�̶��ڱ䣬ʱ�̶��в����ݵķ��ա��ӿ���ֲ�ԽǶ���˵�����ֹ淶���ṩ�ĺô������Ǵ����������ֲʱ�Ĺ�������
l �����ܼ���������Androidϵͳ�����ϵ�һ����ɫ��������ɫ�ڿ���ֲ����Ҳ����ˡ�����뻷����Android�ڽ�����뻷���ϣ���ͨ���̻�����ѡ�����ﵽ�������̵��ϵģ����գ�AndroidԴ����ı��빤�̣�����һ������Android.mk������Ŀɱ��뻷�����Ȼ�ή������ԣ���ֱ�ӵ�����������ڿ�ƽ̨�ϱ��ַdz���ɫ���ٱ���Ӳ������㣬ͬ���ij������ִ�Ƕ��ʽ����ϵͳ�Ͽ��ܶ��У����Ǵ�Զ��Android��HAL��Ҫ���ӣ���������������Ϳ������ڿ�ƽ̨�Է���Ҳ����ָ��á�
���Ǵ�ͳ��Ƕ��ʽLinux�����������������һ��Լ���׳ɵĴ�ͳ������רע����ν���Դ����������Ȼ���ܽ�PC�ϵ����л����հᵽǶ��ʽ��������˼·�����¿���������ϵͳ������ֲ�Ա�����ûʲô����ģ�ֻ�Dz��Ǹ�X86��Դ���룬�����ǿ�����ֲ�����ǣ���������������ϵͳ��һ�㶼�ڽṹ�Ϲ��ڸ��ӣ����й���������ԣ�Ӧ�ó���ӿڲ���ͳһ������Ҳ���ѡ�����������ϵͳ�������Ӱ�쵽��ϵͳ�Ŀ���ֲ�ԡ����翪ԴǶ��ʽLinux���������maemo������һ���ܺõ����ӣ�

����Maemo�������ܶ��ԣ�����似��Ҳ���Կ�����似��Android�IJ�λ��ṹ����ע�⿴����ϵͳ���ʱ�����ǾͲ��ѷ��֣������IJ�λ��ṹ�Ǽٵģ���Maemo�����ʵ���Ͼ���һ��С�ͻ���Linux���滷������Xorg����gtk����һ��ѵ������⣬��̻��������봫ͳLinuxû�κ�����������ν�������ϵĹ��ܣ�����Maemo�ĺ����Meego��Ҳ����ˣ�ֻ������gtk��ͼ�ν��滻����Qt�ģ�Ȼ������Qt������װ����ν��UX����������ҩ����ʱ��Meego����ӵ��һ��PC���ġ�
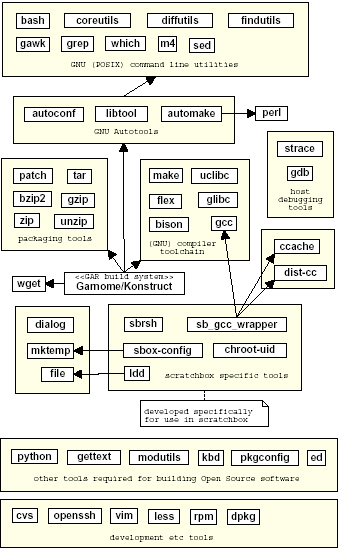
һ������ϵͳ�Ľ�����뻷���������빹����һ�ױȽϸ��ӵı��뻷��֮�ϣ�ͨ���ڱ��뻷����ģ���һ��Linux���л�����Ȼ����ܱ��뾡���ܶ��Դ���롣�����Ľ�����뻷����Open Embedded��ScratchBox�ȡ���Ȼ�в�ͬ�Ľ������ʵ���ϵ�˼·������û�н������ֲ�����⣬���DZ�����Linux����ϵͳ�����У�����ʹ���ϵĸ��ӳ̶ȣ����Ǿ���ḻ��Linux������û�취���ʹ�á������DZȽ����õ�ScratchBox��Ҳ������������眼�����ҵĽṹ��
�����������״��Android�ڽ������ֲ������ʱ��˼·��Ҫ�öࡣ��Ȼԭ���ij��Բ��ɹ���PC��������Ƕ��ʽ������Ч�������ã���ʱ�Ϳ��Ի�һ��˼·��һ�֡���豹��桱��˼·��ֱ�Ӵ���ײ�������ƣ�������롣����������һ������Ҫǰ������������Android�������������������ʵ�ֵģ���һ��������ϵͳ�����еı��뻷���������Դ�Դ�������ϵͳ���������
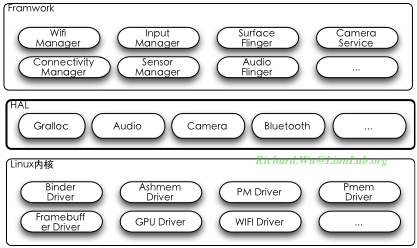
��ϵͳ�ṹ�ϣ�Android������ϱ������˴�ͳ�Ĵ����ѹο�Դ��������������Լ����������λ��Ҫʹ�õĿ�Դ���룬���û�к��ʵĿ�Դ���룬����ṩһ����ʵ����ʵ����һ���ֵĹ��ܡ����ǣ��õ����Ǿ���������Android���IJ�ṹ��
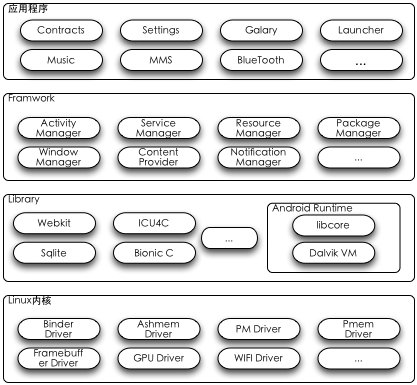
�����������IJ�ṹ���ײ��Linux�ں˲㣬��Щ��������Ƕ��ʽLinux��������ǹ�ͨ�����ԣ�����һ���ġ��������������������ϵͳ���ྶͥ�ˣ�Ӧ�ó������һ�ֻ��ڡ�ɳ�С�ģʽ�ģ��Թ��ܹ���Ϊ����Ŀ�ĵ�ͳһ�����㣬����ֻ�����ڿ�����ͬʱ����ͨ��API���淶��ЩӦ�ó������Ϊ��Framework�㣬����Android�����ĺ��IJ㣬���ӱ�̻�������˵����һ������Java�㣬�κεײ㹦�ܻ�Ӳ���ӿڵķ��ʣ�����ͨ��JNI���ʵ����Ͳ����ʵ�֣���Framework�ṩ֧�ŵľ���Library�㣬Ҳ����ʹ�õ�һ���Լ�ʵ�ֵģ����ǵ������Ŀ������һ����C/C++��д�Ŀ���ֱ���ڻ�����ִ�е�ELF�ļ�Ϊ����
�������ָ��IJ�ι�ϵ��ʹAndroid���õ���Դ���������˵���ӹ̶���Ӧ�ó����������ֻ�����Java��Framework��ı���Ҫô��JavaҪô��JNI����Library�������C/C++�ı��롣�ڱȽϹ̶��ı���Ŀ������ϣ����뻷������Ҫ������������Ƚ��٣����Ǹ�����ͨ��һЩ���ı��뻷����ʵ�֡�Androidʹ����������ı��뻷��GnuMake��Ȼ����������ʹ���������Gnu������������library�붯̬����֧�֣�������Դ���룬�����ͨ����������������ɶ�̬���ӡ��õ��Ľ���Ǽ�������Ҫ���������ϵĻ���֧�֣��Ӷ������ڶ��ֲ���ϵͳ���������У�Android�ı��빤���ļ����Ƚϼ������ױ�д��Android.mk����Android��ı��빤���ļ���Զ��������autoconf����Ҫ���ȴ�ͳ��MakefileҲ���������⡣
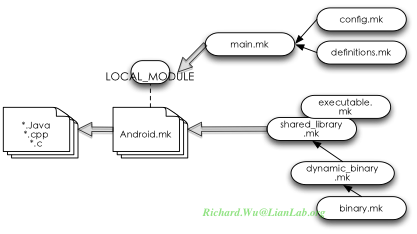
Android�ı���ϵͳ����buildĿ¼��һϵ��.mk����ű��������ű���ɣ���build/main.mk��Ϊ����ڡ�main.mk�ļ���ĵ������Ȼ����ͨ��������ѭ����ȥ���������Ҫ��LOCAL_MODULE������ЩLOCAL_MODULE�ı���Ŀ�꣬����Android.mk������ģ���������α���Ŀ����������ɼ�include $(BUILD_*)�����ı����ѡ�����ṩ������include $(BUILD_SHARED_LIBRARY)���������ɶ�̬���ӿ�.so�ļ��������ı���ϵͳ����autoconf������ԣ������˿�ƽ̨����д��
��Ȼ�������ı��빤�ߣ�Ҳ����û�д��۵ģ�ʹ�ü�����Android���뻷������ζ��Android������һЩ���о��ִ���Ŀ���ֲ�ԣ�Linux�������һЩ���ÿ���ֲ��Android��������Ҫ������ֲ�����������ܲ���������ffmpeg��Ŀǰ����ֻ������Ӧ�ó���ſϻ�����������ֲ��Androidϵͳ�
��Ȼ�������Լ�����ṹ�����и����ı��뻷������������������⣬���ǵ�Androidϵͳ�������ͨ������ϵͳ���á���д�������豸�ļ�����ɵײ�IJ�������Ȼ���ǵ�Androidϵͳ��ֻ����һ�����˾�ʲô�����ǣ�û���κι��ܡ���Ȼ����ӵ������ؼ�ϵͳ�ṹ���������ڲ��Լ����Լ����뷨ȥ����Ӳ��Ҳ�ǿ��ԣ�ֻ��������������ά�������Ĵ�����úܴ�������ͨ����/dev/input/event0����������������/dev/input/event1������������Ӧ�����������ƽ̨����Щ�豸���ֱ�����ô�죿������Щ˽�л�ƽ̨������ȫ��ʹ�������ı����豸�ļ�����ʱ��ô�죿�ѵ����ÿ��ƽ̨��һ��Դ����������Щ�ģ����Ǿ������ڲ����ʽӿ�ͳһ�������⣬Android�ڶ��ڵײ���豸�ļ��ķ����ϣ��������һ�����Ҳ�������ǵ�Ӳ������㡣
Ӳ������㣬ȷ��˵���ǽ���Framework����Linux�ں˲�֮���һ����Σ�Frameworkͨ��Ӳ��������ͳһ�ӿ������·��ʣ���Linux�ں���Ӳ�����ʽӿ��ϵIJ����ԣ���ͨ��Ӳ����������������Ρ�Ӳ������㣬Ӣ����Hardware Abstraction Layer�����HAL������Ҳ�������dz�������AndroidHAL�㡣
�ṩӲ�������֮����ʱFramework����ײ�Linux�ں�֮�������ԣ�����ȫ�������ˡ����Ҫ��Android������������ϵͳ�����Dz���ϵͳ�ں�֮�ϣ�ֻ��Ҫ��HAL�����Ӧ�ӿ�ʵ�ֻ�������ƽ̨�ϵķ��ʻ��Ƽ��ɣ���Frameworkֻ��ʹ��HAL���ͳһ�ӿ����·��ʣ���ȫ��֪���ײ�䶯��Ϣ��
��Android�������Ӳ��������ʵ�ǰ������ֺ���ģ����ܻ��ж��ֵ�Ӳ������ʵ�֣�����RIL��BlueZ�����ľ����ܼ������н�������Ĺ����ϵ�HAL��Framework��ͨ��Socket�����ʴ�ͳ��ʽʵ�ֵ�daemon��Ҳ��Gralloc��Camera�����ȶ���Framework���·��ʵĽӿڣ�Ȼ����Ӳ�������ṩ�ӿ�ʵ�ֵ������ϵ�HAL�����ǵ�Android�ϵ�HALʵ�֣������רָ�����ϵ�HAL����Դ�������hardwareĿ¼�ṩ��
�����ϵ�HAL����ʵ����Ҳ��ֳ����֣�һ�ֻ��ں���ֱ�ӷ��ʵķ�ʽ��ʵ�֣����ַ�ʽ�Ƚϼֱ��������������ϣ�����Ϊlibhardware_legacyʵ�֣���Ŀ¼hardware/libhardware_legacy��ʵ�ֵ�һ������̬���ӿ���ʵ�֣���һ����ʹ�����������ļ��ɣ��ϲ�ͨ��һ��hardware_module_t�����ʣ��������ijһ��HAL��ʵ�֣���Ὣ��һhardware_module_t�����������չ�����ַ�ʽ����Ϊlibhardwareʵ�֣���hardware/libhardware�ṩhardware_modult_t�ķ��ʽӿڣ�Ӳ�����ʵ�ʵ�ֲ��֣�Ҳ�Ƕ�̬���ӿ��ļ�������������ʱ���ݰ忨�ľ������ã����ж�̬���ء��ӳ�Զ����libhardware_legacy�ṹ��HALʵ����һ���м䷽������Android��չ�������п��ܻᱻlibhardware��ʽ��ʵ����ȡ��������Android 4.0�Audio��Camera�����libhardware_legacy��libhardware��ת�䡣
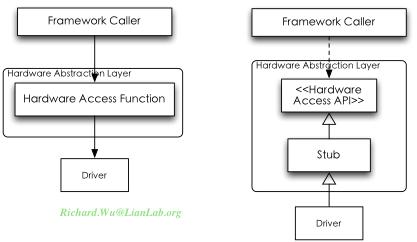
����ƵĽǶ�������libhardware_legacy��Ȼ�������Linux�ں˵�������⣬����ֱ�Ӻ����ӿڵķ��ʣ��վ���������Բ�������libhardware_legacyʵ��HAL�Ķ�̬���ӿ⣬���뱻ֱ�����ӵ�Framework��ʵ���ͨ��JNI����ֱ�ӷ��ʣ����߱���̬�ԣ�����֧��ͬһ��Android��ִ�л���֧�ֲ�ͬӲ��ƽ̨������ƽǶ���˵���κγ���������һ�μ�ӵ�����ʵ�֣����ǣ�������Ӳ�����ʽӿ����ټ���һ����������libhardware.so��Framework����ֱ�ӷ��ʾ���Ķ�̬���ӿ�ʵ�֣�����ͨ��libhardware.so��ʵ�ֵ�ͨ�ýӿ������·��ʣ�����Ҳֻ����õ�Ԥ����õ�һЩ���ʽӿڣ���HALʵ�ֵģ�����Stub��ʽ���ṩ��ϵͳ��һЩ���ܷ��ʵľ���ʵ�֡������������ģ�������Ϊ��ϵͳ�ṩͷ�ļ���Ҳ����������ͼ�е�<<Hardware Access API>>����Щֻ�ǽӿ��ඨ�塣��ʵ���ϣ�������ֱ��ͨ��ͷ�ļ���ʵ�֣�����ͨ��ʵ��һ������һ�����Ե�hardware_module_t�����ݽṹ���������ṩ����ĺ������ýӿڣ���ͷ�ļ�������Ҫ�Ľӿ����Ӧ��Ϊʲô����Stub�أ�����Ϊ��libhardware����ģʽ��ѽӿڶ���������ʵ�ֳ��뿪������Ȼ��һ����ʹ���������������ʵ�֣�һ����ͨ��C��ʵ�ֵģ������ṩ��Interface+Stub�����������ʽ��ʵ�֣�����libhardware��ʱҲ����Ϊstubģʽʵ�ֵ�HAL��
ʹ��libhardware֮��HAL��ʵ���ϵĿɸ�����������ʱ������������ǿ�ˡ���libhardware����£�Framework������ֱ�ӵ���HAL�㣬����ͨ��hw_get_module()��������/system/lib/hw��/system/vendor/lib/hw������Ŀ¼��ѭ��Ѱ�Һ��ʵ�.soʵ�֣��������sensor������sensor.default.so��sensor.goldfish.so��sensor.xxx.so�����в�ͬ��ʵ�֣������ڼ��غ��ʵ�ʵ�֡���Ȼ��Щֻ���ڿ���ʱִ��һ�Σ���ͨ����ʽ����Ҳʵ������ͬһ�ݶ����ƴ����ṩ����Ӳ��ƽ̨��֧�֡�ʹ��libhardwareʵ�ֵ�HAL�������ǵ�ʵ�ֵ�HAL������ʱ�����ǿ���ɾ���������HAL����ʱ����ʱ��ʹ��һ��xxx.default.so�Ĵ�����ʵ�ֵIJ������κ�Ӳ�����ʵ�.so�ļ��������ǻ��ǿ����ƿ�����ʱ��HAL���ش���
Android����ǿ������ֲ�Ե���ƣ�����ʹAndroid����ֲ��ֲ���̱����ԱȽϼ��������Android���ֻ�����ƽ��Ŀ�����Ҳ��������Ҫ����ֻ���ṩ�����ص������ļ����Ӷ����Ըı�һЩ����ʱ�����ò�����������ǵ�Ӳ��ƽ̨��AndroidԴ����ʱʹ�õı�ƽ̨������Google�ġ����ӡ��ֻ�Nexusϵ�еIJ�Ʒ������pandaboard������Ϊ�ο���ƵIJ�Ʒ����������ֲ���̶��ԣ����ǿ���ʲô������Ҫ����ֱ�ӿ��Ա������У�Ȼ��������Ʒ���������������ʹ�õ�Ӳ��ƽ̨��ijЩ�����ṩ�Ŀ�Դ��Ŀ��Ӳ���ṹһ��������Qualcomm�ṩ��codeaurora.org��TI��Omapedia�����и����̶�ӿԾ�����linaro.org��Ŀ�ȵȣ���ʱ��Ҫ��ɵ���ֲ����Ҳ����似�ĺ�С��������ǵ��ṩ��Ӳ��ƽ̨��Android��Щ���еĿ�Դ��Դ�ܲ�һ������ʱ��������Ҫ��ɵ���ֲ����Ҳ����ܴ�ֻ��Ҫ�����ض���Ӳ��ƽ̨ʵ��HAL����һ��������Ҫ�Ĺ�����ԶС������ƽ̨����ֲ���̡�
Android����ֲ���̣������Ϸ�Ϊ��
l Bootloader��Linux�ں˵���ֲ
l Repo������AndroidԴ�������repo���������ʹ��repo��
l �����������Bionic C����Dalvik���������ֲ���������ARM��X86��MIPS�����ֻ������ܣ�
l �ṩ�忨֧������Ҫ������
l ʵ������Ҫʹ�õ�HAL
l Android��Ʒ������ɽ�����ǹ����ϵĶ���
��Щ��ֲ���̵IJ�������ͼ��ʾ��
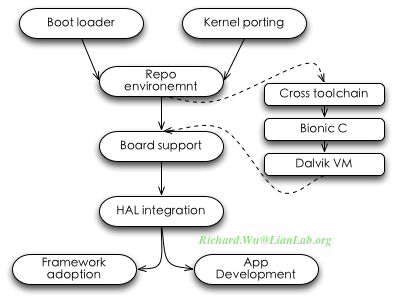
����������Android��ֲ��ϵͳ���������ԣ�������������Ҫ���Ĵ��벢������ô����Bootloader��Linux�ں˵���ֲ����һ�㶼�ڽ���Androidϵͳ��ֲʱ��ͻ�����ģ���������ȥѡ��ij�����̵���оƬʱ��Application Processor������ΪAP������ЩAndroid֮ǰ��֧�ִ��Ѿ�����������Ϊ��ҵ�İ��������dz��Ǽ�����������������Ҳ����Ҫ�Ӵ������������Dalvik���������ֲ������һ������£����ǵ�Android��ֲ�Ǵӽ���repoԴ�������������ʼ��Ȼ���ٽ��а忨��ص����ã�Ȼ��ʵ��HAL����Android�IJ�Ʒ��������裬Framework��ϸ�������д�Լ�ƽ̨�������Ӧ�ó�����格��������˵��FrameworkҲ������Android��ֲ������Χ�ڵģ�����һ�������λ��Android��Ʒ������Android���ƻ���������Android��ֲ�����˵�dz������������Android��Ʒ�������һ���ȽϺ�ʱ�������Ĺ��̡�
��ν�İ忨�������ļ���һ���Ƿ���һ��ר�ŵ�Ŀ¼���2.3��ǰ���Ƿ���vendorĿ¼�£���2.3��ʼ��vendorĿ¼ֻ��Ŷ����ƴ��룬�����ļ��Ƶ���deviceĿ¼������һĿ¼����ԡ�������/�豸������������ʽ���淶���õ�Ŀ¼�ṹ�������Dz�������ti���豸����panda������ԡ�device/ti/panda���������Щ�����ļ����������Ŀ¼�����ƽ̨��ص�����������ļ������ǻἸ���ؼ��ļ����ɣ�
} vendorsetup.sh��ʹ��add_lunch_combo�����������뻷��
} AndroidProducts.mk�����ǻᱻ����ϵͳɨ����ļ���ͨ������һ�ļ����ٵ������ı��������ļ�������ti_panda.mk
} ti_panda.mk������һ�ļ��ﶨ�����IJ�Ʒ�����豸����Щ�ؼ���������Щ��������Android�����������ؼ��������õı�����һ��˵��������ļ�����ܸ��ӣ���Ҫ��������һЩ�����������ļ���������е����ã������������õȡ����豸��������ã���һ����ʹ��ͬĿ¼�µ�device.mk�ļ������ж��ƻ������á�
} device.mk������һ�ļ���ʹ��һЩ���Ӹ���һЩ���ã�����һЩ��Ҫ������ӹ��̣�����ijЩ����ı���������Լ�����ϵͳijЩ���ԵĶ��ƻ���������Ҫ�Զ�����������ʾЧ���������ļ���
} BoardConfig.mk������һ�ļ����ǰ�����ص�һЩ������Ժ�ķ�ʽ���뵽������������BOARD_SYSTEMIMAGE_PARTITION_SIZE������system�����Ĵ�С, TARGET_CPU_SMP�������Ƿ���Ҫʹ��SMP���Գƶദ������֧�ֵȡ�һ�㣬����ͬһ���忨��������Щ���������ճ��������ġ�
���е���Щ�����ļ��������DZ���ģ�ֻ�����ǽ����Եģ�����һ����Ҳ����¶�������ڿ�Դ�Ļ������ʡ��Ͼ��ǿ�Դ�ķ����������ʹ��Լ���׳ɵĽ�����������Ҷ���ÿ�Ҳ֪����ô�ġ���һЩ�ڿ�Դ���ò��õij��̣�����Щ�����û�����ϲ���Լ���һ����������Ҫ�Ե��Լ����ڲ�ͬ�����Զ��������ļ���д������ֲ���̣�Ҳ��Ҫ�����������Դ���
�������������Щ�����ϵĹ��������Ƚ���Щ�����ϴ���repo�ķ���������������ʣ�µ���ֲ��������ʵ������Ҫ��HAL�ˡ���Android��ֲ������ܶ�HAL��ʵ�֣��ǿ��Դ������õģ�������һ����似�����ø��ƹ�����Ȼ���ٽ���ϸ����������ʹ��ALSA ASoC��ܵ���Ƶ֧�֣��������ܶ���ͨ�õģ�ֻ��Ҫ��Audio Path��HiJack�����Ͻ��������ɡ�
- 1¥rain_butterfly1Сʱǰ
- �� �������