让我们来看看SensorManager的代码
SensorManager框架层代码
@frameworks/base/core/java/android/hardware/SensorManager.java
public SensorManager(Looper mainLooper) {
mMainLooper = mainLooper; // 上面说了,这是Activity的Looper
synchronized(sListeners) {
if(!sSensorModuleInitialized) {
sSensorModuleInitialized = true;
nativeClassInit(); // 好像是调用本地方法初始化
sWindowManager = IWindowManager.Stub.asInterface(
ServiceManager.getService("window")); // 获得Windows服务,不管它
if (sWindowManager != null) {
// if it's null we're running in the system process
// which won't get the rotated values
try {
sRotation = sWindowManager.watchRotation(
newIRotationWatcher.Stub() {
public voidonRotationChanged(int rotation) {
SensorManager.this.onRotationChanged(rotation);
}
}
);
} catch (RemoteException e) {
}
}
// initialize the sensor list
sensors_module_init(); // 初始化sensor module
final ArrayList<Sensor> fullList = sFullSensorsList; // SensorManager维护的Sensor列表
int i = 0;
do {
Sensor sensor = new Sensor(); // 创建sensor对象,这个是传递给App的哦
//调用module的方法,获得每一个sensor设备
i = sensors_module_get_next_sensor(sensor, i);
if (i>=0) {
//Log.d(TAG, "found sensor: " + sensor.getName() +
// ", handle=" +sensor.getHandle());
sensor.setLegacyType(getLegacySensorType(sensor.getType()));
fullList.add(sensor); // 添加到SM维护的Sensor列表(嘿嘿)
sHandleToSensor.append(sensor.getHandle(), sensor);
}
}while (i>0);
sPool= new SensorEventPool( sFullSensorsList.size()*2 );
sSensorThread = new SensorThread(); // 哟,创建线程了好像
}
}
}
很明显nativeClassInit(),sensors_module_init(),sensors_module_get_next_sensor()都是本地实现的方法。
private static native void nativeClassInit();
private static native int sensors_module_init();
private static native intsensors_module_get_next_sensor(Sensor sensor, int next);
根据之前看代码的经验可知,很可能在frameworks/base/core/对应一个jni目录下的存在其对应的本地代码:
frameworks/base/core/java/android/hardware/SensorManager.java
frameworks/base/core/jni/android_hardware_SensorManager.cpp
果不其然,在jni存在其本地代码,让我们来看下nativeClassInit函数:
@frameworks/base/core/jni/android_hardware_SensorManager.cpp
static void
nativeClassInit (JNIEnv *_env, jclass _this)
{
jclasssensorClass = _env->FindClass("android/hardware/Sensor");
SensorOffsets& sensorOffsets = gSensorOffsets;
sensorOffsets.name =_env->GetFieldID(sensorClass, "mName", "Ljava/lang/String;");
sensorOffsets.vendor =_env->GetFieldID(sensorClass, "mVendor", "Ljava/lang/String;");
sensorOffsets.version =_env->GetFieldID(sensorClass, "mVersion", "I");
sensorOffsets.handle =_env->GetFieldID(sensorClass, "mHandle", "I");
sensorOffsets.type = _env->GetFieldID(sensorClass,"mType", "I");
sensorOffsets.range =_env->GetFieldID(sensorClass, "mMaxRange", "F");
sensorOffsets.resolution =_env->GetFieldID(sensorClass, "mResolution","F");
sensorOffsets.power =_env->GetFieldID(sensorClass, "mPower", "F");
sensorOffsets.minDelay =_env->GetFieldID(sensorClass, "mMinDelay", "I");
}
其代码比较简单,将Java框架层的Sensor类中的成员保存在本地代码中的gSensorOffsets 结构体中将来使用。
sensors_module_init()本地方法的实现:
static jint
sensors_module_init(JNIEnv *env, jclass clazz)
{
SensorManager::getInstance();
return 0;
}
在本地代码中调用了SensorManager的getInstance方法,这又是一个典型的单例模式获得类的对象,注意这儿的SensorManager是本地的类,而不是Java层的SensorManager类。
本地SensorManager的定义
@frameworks/base/include/gui/SensorManager.h
class SensorManager :
publicASensorManager,
publicSingleton<SensorManager>
{
public:
SensorManager();
~SensorManager();
ssize_tgetSensorList(Sensor const* const** list) const;
Sensor const*getDefaultSensor(int type);
sp<SensorEventQueue> createEventQueue();
private:
//DeathRecipient interface
voidsensorManagerDied();
status_tassertStateLocked() const;
private:
mutable MutexmLock;
mutablesp<ISensorServer> mSensorServer;
mutableSensor const** mSensorList;
mutableVector<Sensor> mSensors;
mutablesp<IBinder::DeathRecipient> mDeathObserver;
};
注意SensorManager又继承了ASensorManager和泛型类Singleton<SensorManager>,而SensorManager类定义里没有getInstance所以其定义肯定是在ASensorManager或Singleton中。
@frameworks/base/include/utils/Singleton.h
template <typename TYPE>
class ANDROID_API Singleton
{
public:
staticTYPE& getInstance() {
Mutex::Autolock _l(sLock);
TYPE*instance = sInstance;
if(instance == 0) {
instance = new TYPE();
sInstance = instance;
}
return*instance;
}
static boolhasInstance() {
Mutex::Autolock _l(sLock);
returnsInstance != 0;
}
protected:
~Singleton(){ };
Singleton() {};
private:
Singleton(const Singleton&);
Singleton& operator = (const Singleton&);
static MutexsLock;
static TYPE*sInstance;
};
//---------------------------------------
}; // namespace android
1) 本地SensorManager的创建
本地SensorManager是一个单例模式,其构造方法相对比较简单,它的主要工作交给了assertStateLocked方法:
@frameworks/base/libs/gui/SensorManager.cpp
SensorManager::SensorManager()
:mSensorList(0)
{
// okay we'renot locked here, but it's not needed during construction
assertStateLocked();
}
status_t SensorManager::assertStateLocked() const {
if(mSensorServer == NULL) {
// tryfor one second
constString16 name("sensorservice");
for (inti=0 ; i<4 ; i++) {
status_t err = getService(name,&mSensorServer);
if(err == NAME_NOT_FOUND) {
usleep(250000);
continue;
}
if(err != NO_ERROR) {
return err;
}
break;
}
classDeathObserver : public IBinder::DeathRecipient {
SensorManager& mSensorManger;
virtual void binderDied(const wp<IBinder>& who) {
LOGW("sensorservice died [%p]", who.unsafe_get());
mSensorManger.sensorManagerDied();
}
public:
DeathObserver(SensorManager& mgr) : mSensorManger(mgr) { }
};
mDeathObserver = new DeathObserver(*const_cast<SensorManager*>(this));
mSensorServer->asBinder()->linkToDeath(mDeathObserver);
mSensors= mSensorServer->getSensorList();
size_tcount = mSensors.size();
mSensorList = (Sensor const**)malloc(count * sizeof(Sensor*));
for(size_t i=0 ; i<count ; i++) {
mSensorList[i] = mSensors.array() + i;
}
}
returnNO_ERROR;
}
在assertStateLocked方法里,先通过getService获得SensorService对象,然后注册了对SensorService的死亡监听器,SensorManager与SensorService不求同年同月同日,只求同年同月同日死。拜完了兄弟之后,调用getSensorList得到所有传感器的对象,存放到mSensorList中,保存在本地空间里。
2) 本地SensorManager中列表的获取
在上面函数调用中首先调用getService来获得SensorService服务,然后执行mSensorServer->getSensorList来获得服务提供的传感器列表:
Vector<Sensor> SensorService::getSensorList()
{
returnmUserSensorList;
}
大家要注意啊,上面的getSensorList函数只是返回了mUserSensorList,而这个变量是在什么时候初始化的呢?
根据2.1节可知,SensorService在本地被初始化时,构造函数里并没有对mUserSensorList进行初始化,而SensorService里有一个onFirstRef方法,这个方法当SensorService第一次被强引用时被自动调用。那SensorService第一次被强引用是在什么时候呢?
在SensorManager::assertStateLocked方法里调用getService获得SensorService保存到mSensorServer成员变量中。
mSensorServer的定义在frameworks/base/include/gui/SensorManager.h中:
class SensorManager :
publicASensorManager,
publicSingleton<SensorManager>
{
mutable sp<ISensorServer>mSensorServer;
mutable Sensorconst** mSensorList;
mutableVector<Sensor> mSensors;
};
可以看出mSensroServer为强引用类型。所以在创建本地中的SensorManager类对象时,自动强引用SensorService,自动调用onFirstRef方法:
@frameworks/base/services/sensorservice/SensorService.cpp的onFirstRef简化方法如下:
void SensorService::onFirstRef()
{
LOGD("nuSensorService starting...");
SensorDevice& dev(SensorDevice::getInstance()); //创建SensorDevice对象dev
if(dev.initCheck() == NO_ERROR) {
sensor_tconst* list;
ssize_tcount = dev.getSensorList(&list); //获得传感器设备列表
if (count> 0) {
…
for(ssize_t i=0 ; i<count ; i++) {
registerSensor( new HardwareSensor(list[i]) ); // 注册在本地获得的传感器
…
}
constSensorFusion& fusion(SensorFusion::getInstance());
if(hasGyro) { // 如果有陀螺仪设备,则先注册和陀螺仪有关的虚拟传感器设备
registerVirtualSensor( newRotationVectorSensor() ); // 虚拟旋转传感器
registerVirtualSensor( new GravitySensor(list, count) ); // 虚拟重力传感器
registerVirtualSensor( new LinearAccelerationSensor(list, count) ); // 虚拟加速器
// these are optional
registerVirtualSensor( new OrientationSensor() ); // 虚拟方向传感器
registerVirtualSensor( new CorrectedGyroSensor(list, count) ); // 真正陀螺仪
// virtual debugging sensors...
char value[PROPERTY_VALUE_MAX];
property_get("debug.sensors", value, "0");
if (atoi(value)) {
registerVirtualSensor( new GyroDriftSensor() ); // 虚拟陀螺测漂传感器
}
}
// build the sensor list returned tousers
mUserSensorList = mSensorList;
if(hasGyro &&
(virtualSensorsNeeds & (1<<SENSOR_TYPE_ROTATION_VECTOR))) {
// if we have the fancy sensor fusion, and it's not provided by the
// HAL, use our own (fused) orientation sensor by removing the
// HAL supplied one form the user list.
if (orientationIndex >= 0) {
mUserSensorList.removeItemsAt(orientationIndex);
}
}
run("SensorService",PRIORITY_URGENT_DISPLAY);
mInitCheck = NO_ERROR;
}
}
}
上面代码首先通过SensorDevice::getInstance()创建对象dev,调用dev.getSensorList(&list)获得传感器列表,将取出的sensor_t类型list传感器列表,塑造了HardwareSensor对象,传递给了registerSensor方法,通过registerSensor注册传感器,然后通过单例模型创建了SensorFusion对象,创建并注册了一系列的虚拟传感器,疑惑,极大的疑惑,怎么传感器还有虚拟的??其实你注意看这几个传感器最前面的条件,if(hasGyro),表示如果存在陀螺仪的话,会创建这些虚拟设备,再看这些虚拟设备:旋转,重力,加速器,方向等,这些设备都对应一个物理硬件:陀螺仪,所以这些逻辑上存在,物理上不存在的设备叫虚拟设备。在初始化了虚拟设备后,将mSensorList传感器列表赋值给mUserSensorList,mSensorList是由registerSensor初始化的,mUserSensorList是要提交给Java框架层的传感器列表,最后通过run方法运行了SensorService线程,我们先来看下registerSensor的代码:
void SensorService::registerSensor(SensorInterface* s)
{
sensors_event_t event;
memset(&event,0, sizeof(event));
const Sensorsensor(s->getSensor());
// add to thesensor list (returned to clients)
mSensorList.add(sensor);
// add to ourhandle->SensorInterface mapping
mSensorMap.add(sensor.getHandle(), s);
// create anentry in the mLastEventSeen array
mLastEventSeen.add(sensor.getHandle(), event);
}
通过分析上面代码可知,将传入的HardwareSensor对象塑造了Sensor,添加到mSensorList向量表里,然后将HardwareSensor对象添加到mSensroMap键值对里,将新建的传感器事件数据封装对象event添加到mLastEventSeen键值对中。
我们通过下面的时序图来看下Sensor列表的获取过程。
1) SensorService监听线程及传感器事件的捕获
让我们再来看看SensorService线程,还记得前面SensorService的父类中有一个Thread类,当调用run方法时会创建线程并调用threadLoop方法。
bool SensorService::threadLoop()
{
LOGD("nuSensorService thread starting...");
const size_tnumEventMax = 16 * (1 + mVirtualSensorList.size());
sensors_event_t buffer[numEventMax];
sensors_event_t scratch[numEventMax];
SensorDevice& device(SensorDevice::getInstance());
const size_tvcount = mVirtualSensorList.size();
ssize_tcount;
do {
// 调用SensorDevice的poll方法看样子要多路监听了
count = device.poll(buffer,numEventMax);
if(count<0) {
LOGE("sensor poll failed (%s)", strerror(-count));
break;
}
// 记录poll返回的每一个传感器中的最后一个数据信息到mLastEventSeen中
recordLastValue(buffer, count);
// handlevirtual sensors 处理虚拟传感器数据
if (count&& vcount) {
sensors_event_t const * const event = buffer;
// 获得虚拟传感器列表
constDefaultKeyedVector<int, SensorInterface*> virtualSensors(
getActiveVirtualSensors());
constsize_t activeVirtualSensorCount = virtualSensors.size(); // 虚拟传感器个数
if(activeVirtualSensorCount) {
size_t k = 0;
SensorFusion& fusion(SensorFusion::getInstance());
if (fusion.isEnabled()) {
for (size_t i=0 ; i<size_t(count) ; i++) {
fusion.process(event[i]); //处理虚拟传感器设备事件
}
}
for (size_t i=0 ; i<size_t(count) ; i++) {
for (size_t j=0 ; j<activeVirtualSensorCount ; j++) {
sensors_event_t out;
if (virtualSensors.valueAt(j)->process(&out, event[i])) {
buffer[count + k] =out;
k++;
}
}
}
if (k) {
// record the last synthesized values
recordLastValue(&buffer[count], k);
count += k;
// sort the buffer by time-stamps
sortEventBuffer(buffer, count);
}
}
}
// sendour events to clients...
// 获得传感器连接对象列表
constSortedVector< wp<SensorEventConnection> > activeConnections(
getActiveConnections());
size_tnumConnections = activeConnections.size();
for(size_t i=0 ; i<numConnections ; i++) {
sp<SensorEventConnection> connection(
activeConnections[i].promote());
if(connection != 0) {
// 向指定的传感器连接客户端发送传感器数据信息
connection->sendEvents(buffer, count, scratch);
}
}
} while (count>= 0 || Thread::exitPending()); // 传感器循环监听线程
LOGW("Exiting SensorService::threadLoop => aborting...");
abort();
return false;
}
我们看到device.poll方法,阻塞在了SensorDevice的poll方法上,它肯定就是读取Sensor硬件上的数据了,将传感器数据保存在buff中,然后调用recordLastValue方法,只保存同一类型传感器的最新数据(最后采集的一组数据)到键值对象mLastEventSeen里对应传感器的值域中。如果传感器设备是虚拟设备则调用SensorFusion.Process()方法对虚拟设备数据进行处理。SensorFusion关联一个SensorDevice,它是虚拟传感器设备的一个加工类,负责虚拟传感器数据的计算、处理、设备激活、设置延迟、获得功耗信息等操作。
让我们来回顾下整个过程吧。
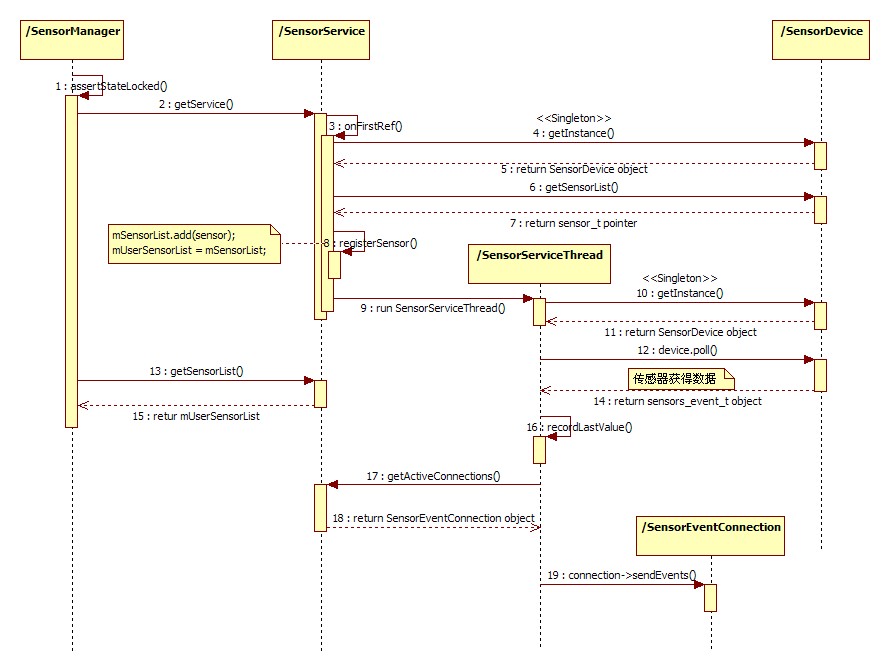
1. SensorManager对象创建并调用assertStateLocked方法
2. 在assertStateLocked方法中调用getService,获得SensorService服务
3. 当SensorService第一次强引用时,自动调用OnFirstRef方法
4.获得SensorDevice单例对象
6. 调用SensorDevice.getSensorList方法sensor_t列表保存在SensorService中
8. 调用registerSensor注册传感器,添加到mSensorList列表中
9. 启动SensorService线程,准备监听所有注册的传感器设备
12. 多路监听注册的传感器设备,当有传感器事件时,返回sensor_event_t封装的事件信息
16. 记录产生传感器事件的设备信息
17. 调用getActiveConnections获得所有的活动的客户端SensorEventConnection类对象
19.向客户端发送传感器事件信息- 5楼gdt_A20昨天 09:44
- 真棒~
- 4楼gdt_A20昨天 18:36
- ^.^~
- 3楼a3248235昨天 14:06
- 很好 很 强大
- 2楼lushengchu_qq_com前天 18:33
- 不明但觉厉害
- 1楼philofly前天 18:33
- 挺好,正准备研究这玩意。