Android Art Hook 技术方案
0x1 开始
Anddroid上的ART从5.0之后变成默认的选择,可见ART的重要性,目前关于Dalvik Hook方面研究的文章很多,但我在网上却找不到关于ART Hook相关的文章,甚至连鼎鼎大名的XPosed和Cydia Substrate到目前为止也不支持ART的Hook。当然我相信,技术方案他们肯定是的,估计卡在机型适配上的了。
既然网上找不到相关的资料,于是我决定自己花些时间去研究一下,终于黃天不负有心人,我找到了一个切实可行的方法,即本文所介绍的方法。
应该说明的是本文所介绍的方法肯定不是最好的,但大家看完本文之后,如果能启发大家找到更好的ART Hook方法,那我抛砖引玉的目的就达到了。废话不多说,我们开始吧。
- 运行环境: 4.4.2 ART模式的模拟器
- 开发环境: Mac OS X 10.10.3
0x2 ART类方法加载及执行
在ART中类方法的执行要比在Dalvik中要复杂得多,Dalvik如果除去JIT部分,可以理解为是一个解析执行的虚拟机,而ART则同时包含本地指令执行和解析执行两种模式,同时所生成的oat文件也包含两种类型,分别是portable和quick。portable和quick的主要区别是对于方法的加载机制不相同,quick大量使用了Lazy Load机制,因此应用的启动速度更快,但加载流程更复杂。其中quick是作为默认选项,因此本文所涉及的技术分析都是基于quick类型的。
由于ART存在本地指令执行和解析执行两种模式,因此类方法之间并不是能直接跳转的,而是通过一些预先定义的bridge函数进行状态和上下文的切换,这里引用一下老罗博客中的示意图:
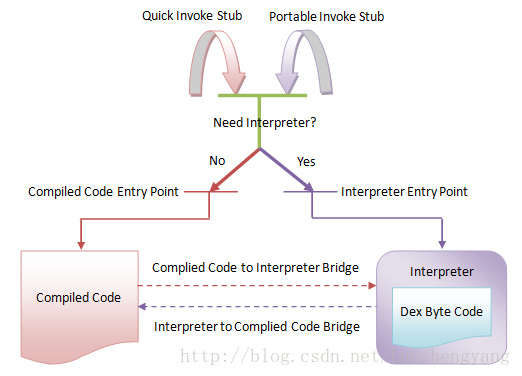
当执行某个方法时,如果当前是本地指令执行模式,则会执行ArtMethod::GetEntryPointFromCompiledCode()指向的函数,否则则执行ArtMethod::GetEntryPointFromInterpreter()指向的函数。因此每个方法,都有两个入口点,分别保存在ArtMethod::entry_point_from_compiled_code_和ArtMethod::entry_point_from_interpreter_。了解这一点非常重要,后面我们主要就是在这两个入口做文章。
在讲述原理之前,需要先把以下两个流程了解清楚,这里的内容要展开是非常庞大的,我针对Hook的关键点,简明扼要的描述一下,但还是强烈建议大家去老罗的博客里细读一下其中关于ART的几篇文章。
- ArtMethod加载流程
这个过程发生在oat被装载进内存并进行类方法链接的时候,类方法链接的代码在art/runtime/class_linker.cc中的LinkCode,如下所示:
static void LinkCode(SirtRef<mirror::ArtMethod>& method, const OatFile::OatClass* oat_class, uint32_t method_index) SHARED_LOCKS_REQUIRED(Locks::mutator_lock_) { // Method shouldn't have already been linked. DCHECK(method->GetEntryPointFromCompiledCode() == NULL); // Every kind of method should at least get an invoke stub from the oat_method. // non-abstract methods also get their code pointers. const OatFile::OatMethod oat_method = oat_class->GetOatMethod(method_index); // 这里默认会把method::entry_point_from_compiled_code_设置oatmethod的code oat_method.LinkMethod(method.get()); // Install entry point from interpreter. Runtime* runtime = Runtime::Current(); bool enter_interpreter = NeedsInterpreter(method.get(), method->GetEntryPointFromCompiledCode()); //判断方法是否需要解析执行 // 设置解析执行的入口点 if (enter_interpreter) { method->SetEntryPointFromInterpreter(interpreter::artInterpreterToInterpreterBridge); } else { method->SetEntryPointFromInterpreter(artInterpreterToCompiledCodeBridge); } // 下面是设置本地指令执行的入口点 if (method->IsAbstract()) { method->SetEntryPointFromCompiledCode(GetCompiledCodeToInterpreterBridge()); return; } // 这里比较难理解,如果是静态方法,但不是clinit,但需要把entry_point_from_compiled_code_设置为GetResolutionTrampoline的返回值 if (method->IsStatic() && !method->IsConstructor()) { // For static methods excluding the class initializer, install the trampoline. // It will be replaced by the proper entry point by ClassLinker::FixupStaticTrampolines // after initializing class (see ClassLinker::InitializeClass method). method->SetEntryPointFromCompiledCode(GetResolutionTrampoline(runtime->GetClassLinker())); } else if (enter_interpreter) { // Set entry point from compiled code if there's no code or in interpreter only mode. method->SetEntryPointFromCompiledCode(GetCompiledCodeToInterpreterBridge()); } if (method->IsNative()) { // Unregistering restores the dlsym lookup stub. method->UnregisterNative(Thread::Current()); } // Allow instrumentation its chance to hijack code. runtime->GetInstrumentation()->UpdateMethodsCode(method.get(),method->GetEntryPointFromCompiledCode());}通过上面的代码我们可以得到,一个ArtMethod的入口主要有以下几种:
- Interpreter2Interpreter对应artInterpreterToInterpreterBridge(art/runtime/interpreter/interpreter.cc);
- Interpreter2CompledCode对应artInterpreterToCompiledCodeBridge(/art/runtime/entrypoints/interpreter/interpreter_entrypoints.cc);
- CompliedCode2Interpreter对应art_quick_to_interpreter_bridge(art/runtime/arch/arm/quick_entrypoints_arm.S);
- CompliedCode2ResolutionTrampoline对应art_quick_resolution_trampoline(art/runtime/arch/arm/quick_entrypoints_arm.S);
- CompliedCode2CompliedCode这个入口是直接指向oat中的指令,详细可见OatMethod::LinkMethod;
其中调用约定主要有两种,分别是:
- typedef void (EntryPointFromInterpreter)(Thread* self, MethodHelper& mh, const DexFile::CodeItem* code_item, ShadowFrame* shadow_frame, JValue* result), 这种对应上述1,3两种入口;
剩下的2,4,5三种入口对应的是CompledCode的入口,代码中并没有直接给出,但我们通过分析ArtMethod::Invoke的方法调用,就可以知道其调用约定了。Invoke过程中会调用art_quick_invoke_stub(/art/runtime/arch/arm/quick_entrypoints_arm.S),代码如下所示:
/* * Quick invocation stub. * On entry: * r0 = method pointer * r1 = argument array or NULL for no argument methods * r2 = size of argument array in bytes * r3 = (managed) thread pointer * [sp] = JValue* result * [sp + 4] = result type char */ENTRY art_quick_invoke_stubpush {r0, r4, r5, r9, r11, lr} @ spill regs.save {r0, r4, r5, r9, r11, lr}.pad #24.cfi_adjust_cfa_offset 24.cfi_rel_offset r0, 0.cfi_rel_offset r4, 4.cfi_rel_offset r5, 8.cfi_rel_offset r9, 12.cfi_rel_offset r11, 16.cfi_rel_offset lr, 20mov r11, sp @ save the stack pointer.cfi_def_cfa_register r11mov r9, r3 @ move managed thread pointer into r9mov r4, #SUSPEND_CHECK_INTERVAL @ reset r4 to suspend check intervaladd r5, r2, #16 @ create space for method pointer in frameand r5, #0xFFFFFFF0 @ align frame size to 16 bytessub sp, r5 @ reserve stack space for argument arrayadd r0, sp, #4 @ pass stack pointer + method ptr as dest for memcpybl memcpy @ memcpy (dest, src, bytes)ldr r0, [r11] @ restore method*ldr r1, [sp, #4] @ copy arg value for r1ldr r2, [sp, #8] @ copy arg value for r2ldr r3, [sp, #12] @ copy arg value for r3mov ip, #0 @ set ip to 0str ip, [sp] @ store NULL for method* at bottom of frameldr ip, [r0, #METHOD_CODE_OFFSET] @ get pointer to the codeblx ip @ call the methodmov sp, r11 @ restore the stack pointerldr ip, [sp, #24] @ load the result pointerstrd r0, [ip] @ store r0/r1 into result pointerpop {r0, r4, r5, r9, r11, lr} @ restore spill regs.cfi_adjust_cfa_offset -24bx lrEND art_quick_invoke_stub
“ldr ip, [r0, #METHOD_CODE_OFFSET]”其实就是把ArtMethod::entry_point_from_compiled_code_赋值给ip,然后通过blx直接调用。通过这段小小的汇编代码,我们得出如下堆栈的布局:
-(low) | caller(Method *) | <- sp | arg1 | <- r1 | arg2 | <- r2 | arg3 | <- r3 | ... | | argN | | callee(Method *) | <- r0 +(high)这种调用约定并不是平时我们所见的调用约定,主要体现在参数当超过4时,并不是从sp开始保存,而是从sp + 20这个位置开始存储,所以这就是为什么在代码里entry_point_from_compiled_code_的类型是void *的原因了,因为无法用代码表示。
理解好这个调用约定对我们方案的实现至头重要。
- ArtMethod执行流程
上面详细讲述了类方法加载和链接的过程,但在实际执行的过程中,其实还不是直接调用ArtMethod的entry_point(解析执行和本地指令执行的入口),为了加快执行速度,ART为oat文件中的每个dex创建了一个DexCache(art/runtime/mirror/dex_cache.h)结构,这个结构会按dex的结构生成一系列的数组,这里我们只分析它里面的methods字段。 DexCache初始化的方法是Init,实现如下:
void DexCache::Init(const DexFile* dex_file, String* location, ObjectArray<String>* strings, ObjectArray<Class>* resolved_types, ObjectArray<ArtMethod>* resolved_methods, ObjectArray<ArtField>* resolved_fields, ObjectArray<StaticStorageBase>* initialized_static_storage) { //... //... Runtime* runtime = Runtime::Current(); if (runtime->HasResolutionMethod()) { // Initialize the resolve methods array to contain trampolines for resolution. ArtMethod* trampoline = runtime->GetResolutionMethod(); size_t length = resolved_methods->GetLength(); for (size_t i = 0; i < length; i++) { resolved_methods->SetWithoutChecks(i, trampoline); } }}根据dex方法的个数,产生相应长度resolved_methods数组,然后每一个都用Runtime::GetResolutionMethod()返回的结果进行填充,这个方法是由Runtime::CreateResolutionMethod产生的,代码如下:
mirror::ArtMethod* Runtime::CreateResolutionMethod() { mirror::Class* method_class = mirror::ArtMethod::GetJavaLangReflectArtMethod(); Thread* self = Thread::Current(); SirtRef<mirror::ArtMethod> method(self, down_cast<mirror::ArtMethod*>(method_class->AllocObject(self))); method->SetDeclaringClass(method_class); // TODO: use a special method for resolution method saves method->SetDexMethodIndex(DexFile::kDexNoIndex); // When compiling, the code pointer will get set later when the image is loaded. Runtime* r = Runtime::Current(); ClassLinker* cl = r->GetClassLinker(); method->SetEntryPointFromCompiledCode(r->IsCompiler() ? NULL : GetResolutionTrampoline(cl)); return method.get();}从method->SetDexMethodIndex(DexFile::kDexNoIndex)这句得知,所有的ResolutionMethod的methodIndexDexFile::kDexNoIndex。而ResolutionMethod的entrypoint就是我们上面入口分析中的第4种情况,GetResolutionTrampoline最终返回的入口为art_quick_resolution_trampoline(art/runtime/arch/arm/quick_entrypoints_arm.S)。我们看一下其实现代码:
.extern artQuickResolutionTrampolineENTRY art_quick_resolution_trampoline SETUP_REF_AND_ARGS_CALLEE_SAVE_FRAME mov r2, r9 @ pass Thread::Current mov r3, sp @ pass SP blx artQuickResolutionTrampoline @ (Method* called, receiver, Thread*, SP) cbz r0, 1f @ is code pointer null? goto exception mov r12, r0 ldr r0, [sp, #0] @ load resolved method in r0 ldr r1, [sp, #8] @ restore non-callee save r1 ldrd r2, [sp, #12] @ restore non-callee saves r2-r3 ldr lr, [sp, #44] @ restore lr add sp, #48 @ rewind sp .cfi_adjust_cfa_offset -48 bx r12 @ tail-call into actual code1: RESTORE_REF_AND_ARGS_CALLEE_SAVE_FRAME DELIVER_PENDING_EXCEPTIONEND art_quick_resolution_trampoline调整好寄存器后,直接跳转至artQuickResolutionTrampoline(art/runtime/entrypoints/quick/quick_trampoline_entrypoints.cc),接下来我们分析这个方法的实现(大家不要晕了。。。,我会把无关紧要的代码去掉):
// Lazily resolve a method for quick. Called by stub code.extern "C" const void* artQuickResolutionTrampoline(mirror::ArtMethod* called, mirror::Object* receiver, Thread* thread, mirror::ArtMethod** sp) SHARED_LOCKS_REQUIRED(Locks::mutator_lock_) { FinishCalleeSaveFrameSetup(thread, sp, Runtime::kRefsAndArgs); // Start new JNI local reference state JNIEnvExt* env = thread->GetJniEnv(); ScopedObjectAccessUnchecked soa(env); ScopedJniEnvLocalRefState env_state(env); const char* old_cause = thread->StartAssertNoThreadSuspension("Quick method resolution set up"); // Compute details about the called method (avoid GCs) ClassLinker* linker = Runtime::Current()->GetClassLinker(); mirror::ArtMethod* caller = QuickArgumentVisitor::GetCallingMethod(sp); InvokeType invoke_type; const DexFile* dex_file; uint32_t dex_method_idx; if (called->IsRuntimeMethod()) { //... //... } else { invoke_type = kStatic; dex_file = &MethodHelper(called).GetDexFile(); dex_method_idx = called->GetDexMethodIndex(); } //... // Resolve method filling in dex cache. if (called->IsRuntimeMethod()) { called = linker->ResolveMethod(dex_method_idx, caller, invoke_type); } const void* code = NULL; if (LIKELY(!thread->IsExceptionPending())) { //... linker->EnsureInitialized(called_class, true, true); //... } // ... return code;}inline bool ArtMethod::IsRuntimeMethod() const { return GetDexMethodIndex() == DexFile::kDexNoIndex;}called->IsRuntimeMethod()用于判断当前方法是否为ResolutionMethod。如果是,那么就走ClassLinker::ResolveMethod流程去获取真正的方法,见代码:
mirror::ArtMethod* ClassLinker::ResolveMethod(const DexFile& dex_file, uint32_t method_idx, mirror::DexCache* dex_cache, mirror::ClassLoader* class_loader, const mirror::ArtMethod* referrer, InvokeType type) { DCHECK(dex_cache != NULL); // Check for hit in the dex cache. mirror::ArtMethod* resolved = dex_cache->GetResolvedMethod(method_idx); if (resolved != NULL) { return resolved; } // Fail, get the declaring class. const DexFile::MethodId& method_id = dex_file.GetMethodId(method_idx); mirror::Class* klass = ResolveType(dex_file, method_id.class_idx_, dex_cache, class_loader); if (klass == NULL) { DCHECK(Thread::Current()->IsExceptionPending()); return NULL; } // Scan using method_idx, this saves string compares but will only hit for matching dex // caches/files. switch (type) { case kDirect: // Fall-through. case kStatic: resolved = klass->FindDirectMethod(dex_cache, method_idx); break; case kInterface: resolved = klass->FindInterfaceMethod(dex_cache, method_idx); DCHECK(resolved == NULL || resolved->GetDeclaringClass()->IsInterface()); break; case kSuper: // Fall-through. case kVirtual: resolved = klass->FindVirtualMethod(dex_cache, method_idx); break; default: LOG(FATAL) << "Unreachable - invocation type: " << type; } if (resolved == NULL) { // Search by name, which works across dex files. const char* name = dex_file.StringDataByIdx(method_id.name_idx_); std::string signature(dex_file.CreateMethodSignature(method_id.proto_idx_, NULL)); switch (type) { case kDirect: // Fall-through. case kStatic: resolved = klass->FindDirectMethod(name, signature); break; case kInterface: resolved = klass->FindInterfaceMethod(name, signature); DCHECK(resolved == NULL || resolved->GetDeclaringClass()->IsInterface()); break; case kSuper: // Fall-through. case kVirtual: resolved = klass->FindVirtualMethod(name, signature); break; } } if (resolved != NULL) { // Be a good citizen and update the dex cache to speed subsequent calls. dex_cache->SetResolvedMethod(method_idx, resolved); return resolved; } else { // ... }}其实这里发生了“连锁反应”,ClassLinker::ResolveType走的流程,跟ResolveMethod是非常类似的,有兴趣的朋友可以跟一下。
找到解析后的klass,再经过一轮疯狂的搜索,把找到的resolved通过DexCache::SetResolvedMethod覆盖掉之前的“替身”。当再下次再通过ResolveMethod解析方法时,就可以直接把该方法返回,不需要再解析了。
我们回过头来再重新“复现”一下这个过程,当我们首次调用某个类方法,其过程如下所示:
- 调用ResolutionMethod的entrypoint,进入art_quick_resolution_trampoline;
- art_quick_resolution_trampoline跳转到artQuickResolutionTrampoline;
- artQuickResolutionTrampoline调用ClassLinker::ResolveMethod解析类方法;
- ClassLinker::ResolveMethod调用ClassLinkder::ResolveType解析类,再从解析好的类寻找真正的方法;
- 调用DexCache::SetResolvedMethod,用真正的方法覆盖掉“替身”方法;
- 调用真正方法的entrypoint代码;
也许你会问,为什么要把过程搞得这么绕? 一切都是为了延迟加载,提高启动速度,这个过程跟ELF Linker的PLT/GOT符号重定向的过程是何其相似啊,所以技术都是想通的,一通百明。
0x3 Hook ArtMethod
通过上述ArtMethod加载和执行两个流程的分析,对于如何Hook ArtMethod,我想到了两个方案,分别
- 修改DexCach里的methods,把里面的entrypoint修改为自己的,做一个中转处理;
- 直接修改加载后的ArtMethod的entrypoint,同样做一个中转处理;
上面两个方法都是可行的,但由于我希望整个项目可以在NDK环境(而不是在源码下)下编译,因为就采用了方案2,因为通过JNI的接口就可以直接获取解析之后的ArtMethod,可以减少很多文件依赖。
回到前面的调用约定,每个ArtMethod都有两个约定,按道理我们应该准备两个中转函数的,但这里我们不考虑强制解析模式执行,所以只要处理好entry_point_from_compiled_code的中转即可。
首先,我们找到对应的方法,先保存其entrypoint,然后再把我们的中转函数art_quick_dispatcher覆盖,代码如下所示:
extern int __attribute__ ((visibility ("hidden"))) art_java_method_hook(JNIEnv* env, HookInfo *info) { const char* classDesc = info->classDesc; const char* methodName = info->methodName; const char* methodSig = info->methodSig; const bool isStaticMethod = info->isStaticMethod; // TODO we can find class by special classloader what do just like dvm jclass claxx = env->FindClass(classDesc); if(claxx == NULL){ LOGE("[-] %s class not found", classDesc); return -1; } jmethodID methid = isStaticMethod ? env->GetStaticMethodID(claxx, methodName, methodSig) : env->GetMethodID(claxx, methodName, methodSig); if(methid == NULL){ LOGE("[-] %s->%s method not found", classDesc, methodName); return -1; } ArtMethod *artmeth = reinterpret_cast<ArtMethod *>(methid); if(art_quick_dispatcher != artmeth->GetEntryPointFromCompiledCode()){ uint64_t (*entrypoint)(ArtMethod* method, Object *thiz, u4 *arg1, u4 *arg2); entrypoint = (uint64_t (*)(ArtMethod*, Object *, u4 *, u4 *))artmeth->GetEntryPointFromCompiledCode(); info->entrypoint = (const void *)entrypoint; info->nativecode = artmeth->GetNativeMethod(); artmeth->SetEntryPointFromCompiledCode((const void *)art_quick_dispatcher); // save info to nativecode :) artmeth->SetNativeMethod((const void *)info); LOGI("[+] %s->%s was hooked\n", classDesc, methodName); }else{ LOGW("[*] %s->%s method had been hooked", classDesc, methodName); } return 0;}我们关键的信息通过ArtMethod::SetNativeMethod保存起来了。
考虑到ART特殊的调用约定,art_quick_dispatcher只能用汇编实现了,把寄存器适当的调整一下,再跳转到另一个函数artQuickToDispatcher,这样就可以很方便用c/c++访问参数了。
先看一下art_quick_dispatcher函数的实现如下:
/* * Art Quick Dispatcher. * On entry: * r0 = method pointer * r1 = arg1 * r2 = arg2 * r3 = arg3 * [sp] = method pointer * [sp + 4] = addr of thiz * [sp + 8] = addr of arg1 * [sp + 12] = addr of arg2 * [sp + 16] = addr of arg3 * and so on */ .extern artQuickToDispatcherENTRY art_quick_dispatcher push {r4, r5, lr} @ sp - 12 mov r0, r0 @ pass r0 to method str r1, [sp, #(12 + 4)] str r2, [sp, #(12 + 8)] str r3, [sp, #(12 + 12)] mov r1, r9 @ pass r1 to thread add r2, sp, #(12 + 4) @ pass r2 to args array add r3, sp, #12 @ pass r3 to old SP blx artQuickToDispatcher @ (Method* method, Thread*, u4 **, u4 **) pop {r4, r5, pc} @ return on success, r0 and r1 hold the resultEND art_quick_dispatcher我把r2指向参数数组,这样就我们就可以非常方便的访问所有参数了。另外,我用r3保存了旧的sp地址,这样是为后面调用原来的entrypoint做准备的。我们先看看artQuickToDispatcher的实现:
extern "C" uint64_t artQuickToDispatcher(ArtMethod* method, Thread *self, u4 **args, u4 **old_sp){ HookInfo *info = (HookInfo *)method->GetNativeMethod(); LOGI("[+] entry ArtHandler %s->%s", info->classDesc, info->methodName); // If it not is static method, then args[0] was pointing to this if(!info->isStaticMethod){ Object *thiz = reinterpret_cast<Object *>(args[0]); if(thiz != NULL){ char *bytes = get_chars_from_utf16(thiz->GetClass()->GetName()); LOGI("[+] thiz class is %s", bytes); delete bytes; } } const void *entrypoint = info->entrypoint; method->SetNativeMethod(info->nativecode); //restore nativecode for JNI method uint64_t res = art_quick_call_entrypoint(method, self, args, old_sp, entrypoint); JValue* result = (JValue* )&res; if(result != NULL){ Object *obj = result->l; char *raw_class_name = get_chars_from_utf16(obj->GetClass()->GetName()); if(strcmp(raw_class_name, "java.lang.String") == 0){ char *raw_string_value = get_chars_from_utf16((String *)obj); LOGI("result-class %s, result-value \"%s\"", raw_class_name, raw_string_value); free(raw_string_value); }else{ LOGI("result-class %s", raw_class_name); } free(raw_class_name); } // entrypoid may be replaced by trampoline, only once.// if(method->IsStatic() && !method->IsConstructor()){ entrypoint = method->GetEntryPointFromCompiledCode(); if(entrypoint != (const void *)art_quick_dispatcher){ LOGW("[*] entrypoint was replaced. %s->%s", info->classDesc, info->methodName); method->SetEntryPointFromCompiledCode((const void *)art_quick_dispatcher); info->entrypoint = entrypoint; info->nativecode = method->GetNativeMethod(); } method->SetNativeMethod((const void *)info);// } return res;}这里参数解析就不详细说了,接下来是最棘手的问题——如何重新调回原来的entrypoint。
这里的关键点是要还原之前的堆栈布局,art_quick_call_entrypoint就是负责完成这个工作的,其实现如下所示:
/* * * Art Quick Call Entrypoint * On entry: * r0 = method pointer * r1 = thread pointer * r2 = args arrays pointer * r3 = old_sp * [sp] = entrypoint */ENTRY art_quick_call_entrypoint push {r4, r5, lr} @ sp - 12 sub sp, #(40 + 20) @ sp - 40 - 20 str r0, [sp, #(40 + 0)] @ var_40_0 = method_pointer str r1, [sp, #(40 + 4)] @ var_40_4 = thread_pointer str r2, [sp, #(40 + 8)] @ var_40_8 = args_array str r3, [sp, #(40 + 12)] @ var_40_12 = old_sp mov r0, sp mov r1, r3 ldr r2, =40 blx memcpy @ memcpy(dest, src, size_of_byte) ldr r0, [sp, #(40 + 0)] @ restore method to r0 ldr r1, [sp, #(40 + 4)] mov r9, r1 @ restore thread to r9 ldr r5, [sp, #(40 + 8)] @ pass r5 to args_array ldr r1, [r5] @ restore arg1 ldr r2, [r5, #4] @ restore arg2 ldr r3, [r5, #8] @ restore arg3 ldr r5, [sp, #(40 + 20 + 12)] @ pass ip to entrypoint blx r5 add sp, #(40 + 20) pop {r4, r5, pc} @ return on success, r0 and r1 hold the resultEND art_quick_call_entrypoint这里我偷懒了,直接申请了10个参数的空间,再使用之前传进入来的old_sp进行恢复,使用memcpy直接复制40字节。之后就是还原r0, r1, r2, r3, r9的值了。调用entrypoint完后,结果保存在r0和r1,再返回给artQuickToDispatcher。
至此,整个ART Hook就分析完毕了。
0x4 4.4与5.X上实现的区别
我的整个方案都是在4.4上测试的,主要是因为我只有4.4的源码,而且硬盘空间不足,实在装不下5.x的源码了。但整个思路,是完全可以套用用5.X上。另外,5.X的实现代码比4.4上复杂了很多,否能像我这样在NDK下编译完成就不知道了。
正常的4.4模拟器是以dalvik启动的,要到设置里改为art,这里会要求进行重启,但一般无效,我们手动关闭再重新打开就OK了,但需要等上一段时间才可以。
0x5 结束
虽然这篇文章只是介绍了Art Hook的技术方案,但其中的技术原理,对于如何在ART上进行代码加固、动态代码原理等等也是很有启发性。
老样子,整个项目的代码,我已经提交到https://github.com/boyliang/AllHookInOne,大家遇到什么问题,欢迎提问,有问题记得反馈。
对了,请用https://github.com/boyliang/ndk-patch给你的NDK打一下patch。
- 1楼vLinker4小时前
- 支持下,这个写的真好,值得学习