���ڡ���������Android ��һ���͡���������Android���������ٳ��棬��֪ʶ�Ĵ�����Ӧ����Ϊֽ��ý���������жϣ������ҽ���CSDN������ȫ��ת�����������ȫ�����ݡ�
��3�� ��������init
������Ҫ����
�� �������init��
�����漰��Դ�����ļ�����λ��
�����DZ��·�����Դ���ļ�������λ�á�
�� init.c
system/core/init/init.c
�� parser.c
system/core/init/parser.c
�� builtins.c
system/core/init/builtins.c
�� keywords.h
system/core/init/keywords/h
�� init.rc
system/core/rootdir/init.rc
�� properties_service.c
system/core/init/properties_service.c
�� libc_init_dynamic.c
bionic/libc/bionic/libc_init_common.c
�� libc_init_common.c
bionic/libc/bionic/libc_init_common.c
�� properties.c
system/core/libcutils/properties.c
3.1 ����
init��һ�����̣�ȷ�е�˵������Linuxϵͳ���û��ռ�ĵ�һ�����̡�����Android�ǻ���Linux�ں˵ģ�����initҲ��Androidϵͳ���û��ռ�ĵ�һ�����̣����Ľ��̺���1����Ϊ���ֵ�һ�ŵĽ��̣�init�������˺ܶ༫����Ҫ�Ĺ���ְ�𣬱��½���ע���������Ƚ���Ҫ��ְ��
�� init���̸���ϵͳ�еļ����ؼ����̣���������һ��Ҫ���ܵ�Zygote��������Java����Ŀ����ߡ���ô��init��������δ���Zygote���أ�
�� Androidϵͳ�кܶ����ԣ�����init���ṩ��һ��property service�����Է������������ǡ���ô������Է�������ô�������أ�
�������������½�ͨ����������������������init��
�� init����zygote��
�� init�����Է�������ι����ġ�
3.2 init����
init���̵���ں�����main�����Ĵ���������ʾ��
[-->init.c]
int main(int argc, char **argv)
{
intdevice_fd = -1;
intproperty_set_fd = -1;
intsignal_recv_fd = -1;
intkeychord_fd = -1;
int fd_count;
ints[2];
intfd;
structsigaction act;
chartmp[PROP_VALUE_MAX];
structpollfd ufds[4];
char*tmpdev;
char*debuggable;
//�����ӽ����˳����źŴ����������ú���Ϊsigchld_handler��
act.sa_handler = sigchld_handler;
act.sa_flags= SA_NOCLDSTOP;
act.sa_mask = 0;
act.sa_restorer = NULL;
sigaction(SIGCHLD, &act, 0);
......//����һЩ�ļ��У��������豸����Щ�Ǻ�Linux��صģ��������������ۡ�
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0,NULL);
mount("proc", "/proc", "proc", 0, NULL);
mount("sysfs", "/sys", "sysfs", 0, NULL);
//�ض��������/���/���������/dev/_null_��
open_devnull_stdio();
/*
����init����־����豸Ϊ/dev/__kmsg__���������ļ���������unlink��,
�������������̾���������ļ���ȡ��־��Ϣ�ˡ�
*/
log_init();
//�����漰�ܶ��Linuxϵͳ��ص�֪ʶ������Ϥ�Ķ��߿������о������Dz�Ӱ�����ǵķ���
//����init.rc�����ļ�
parse_config_file("/init.rc");
......
//�����������ͨ����ȡ/proc/cpuinfo�õ�������Hardware�����ҵ�HTCG7�ֻ�Ϊbravo��
get_hardware_name();
snprintf(tmp,sizeof(tmp), "/init.%s.rc", hardware);
//��������ͻ�����ص������ļ����ҵ�G7�ֻ���Ӧ�ļ�Ϊinit.bravo.rc��
parse_config_file(tmp);
/*
�������������������ļ���õ�һϵ�е�Action��������������������뽫ִ����Щ����
early-init�ε�Action��init������ִ�е�ʱ�仮��Ϊ�ĸ��Σ�early-init��init��
early-boot��boot��������Щ��������������������ɺ����ִ�У����Ծ������Ⱥ�֮�֡���Щ
���������ĸ����������ļ��������������������ļ������֪ʶ��
*/
action_for_each_trigger("early-init", action_add_queue_tail);
drain_action_queue();
/*
��������Uevent��Linux�ں˽�����socket������Uevent��֪ʶ����9���ж�
Vold���з���ʱ�������ܡ�
*/
device_fd = device_init();
//��ʼ����������ص���Դ
property_init();
//��ʼ��/dev/keychord�豸����͵����йأ����鲻���������÷������߿��������о���
//���ݱȽϼ�
keychord_fd = open_keychord();
......
/*
INIT_IMAGE_FILE����Ϊ��/initlogo.rle�������������������������ļ���Ϊϵͳ�Ŀ���
���棬ע�⣬�����ǿ����������Ƴ���bootanimation���صĿ��������ļ���
*/
if(load_565rle_image(INIT_IMAGE_FILE) ) {
/*
�������initlogo.rle�ļ�ʧ�ܣ�������û������ļ���������/dev/ty0�豸����
�����ANDROID����������Ϊ�������档��ģ�����Ͽ����Ŀ��������������
*/
......
}
}
if(qemu[0])
import_kernel_cmdline(1);
......
//����property_set�������������һ�����������������������ֵ��
property_set("ro.bootloader", bootloader[0] ? bootloader :"unknown");
......//ִ��λ��init�εĶ���
action_for_each_trigger("init", action_add_queue_tail);
drain_action_queue();
//�������Է���
property_set_fd = start_property_service();
/*
����socketpair�������������Ѿ�connect�õ�socket��socketpair��Linux��ϵͳ����,
����Ϥ�Ķ��߿�������man socketpair��ѯ�����Ϣ������ͻ�֪�����ǵ��ô��ˡ�
*/
if(socketpair(AF_UNIX, SOCK_STREAM, 0, s) == 0) {
signal_fd = s[0];
signal_recv_fd = s[1];
......
}
......
//ִ�������ļ���early-boot��boot�εĶ�����
action_for_each_trigger("early-boot", action_add_queue_tail);
action_for_each_trigger("boot", action_add_queue_tail);
drain_action_queue();
......
//init��ע�����ĸ���������顣
ufds[0].fd= device_fd;//device_fd���ڼ��������ں˵�Uevent�¼�
ufds[0].events = POLLIN;
ufds[1].fd = property_set_fd;//property_set_fd���ڼ����������Է��������¼�
ufds[1].events= POLLIN;
//signal_recv_fd��socketpair�����������¼���������һ��socket��
ufds[2].fd = signal_recv_fd;
ufds[2].events = POLLIN;
fd_count = 3;
if(keychord_fd > 0) {
//���keychord�豸��ʼ���ɹ�����initҲ���ע��������豸���¼���
ufds[3].fd = keychord_fd;
ufds[3].events = POLLIN;
fd_count++;
}
......
#if BOOTCHART
......//��Boot char��أ����������ˡ�
/*
Boot chart��һ��С���ߣ����ܶ�ϵͳ�����ܽ��з�����������ϵͳ�������̵�ͼ����
���ṩһЩ�м�ֵ����Ϣ������Щ��Ϣ�����ô����ǰ�������ϵͳ�������ٶȡ�
*/
#endif
for(;;) {
//�Ӵ�init������һ������ѭ����
int nr, i, timeout = -1;
for (i = 0; i < fd_count; i++)
ufds[i].revents = 0;
//��ѭ����ִ�ж���
drain_action_queue();
restart_processes(); //������Щ�Ѿ���ȥ�Ľ���
......
#if BOOTCHART
...... // Boot Chart���
#endif
//����poll�ȴ�һЩ����ķ���
nr= poll(ufds, fd_count, timeout);
......
//ufds[2]�������signal_recv_fd�����ڽ�������socket����Ϣ��
if(ufds[2].revents == POLLIN) {
//��һ���ӽ���ȥ����initҪ�����������
read(signal_recv_fd, tmp, sizeof(tmp));
while (!wait_for_one_process(0))
;
continue;
}
if(ufds[0].revents == POLLIN)
handle_device_fd(device_fd);//����Uevent�¼�
if(ufds[1].revents == POLLIN)
handle_property_set_fd(property_set_fd);//�������Է�����¼���
if(ufds[3].revents == POLLIN)
handle_keychord(keychord_fd);//����keychord�¼���
}
return0;
}
������Ĵ����п�֪��init�Ĺ��������Ǻ��صġ�����Ĵ�������ʡ���˲����У��ɽ�����Ǻܳ��������ӱ���Ҫ����������֪ʶ���������ɽ�init�Ĺ������̾���Ϊ�����ĵ㣺
�� �������������ļ������У���������init.rc�ļ��Ľ�����
�� ִ�и����εĶ���������Zygote�Ĺ������������е�ij������ɵġ�
�� ����property_init��ʼ��������ص���Դ������ͨ��property_start_service�������Է���
�� init����һ������ѭ�������ҵȴ�һЩ����ķ������ص��עinit��δ�������socket���������Է�������ص����顣
���������̣����Ժ��������ʱ���õķ����������ڷ�������Ĺ����У�Ҳ��ʹ�����ַ�����
3.2.1 ���������ļ�
��������Ĵ����֪����init�л�������������ļ�������һ����ϵͳ�����ļ�init.rc������һ���Ǻ�Ӳ��ƽ̨��ص������ļ�����HTC G7�ֻ�Ϊ������������ļ���Ϊinit.bravo.rc������bravo��Ӳ��ƽ̨�����ơ��������������ļ����н��������õ���ͬһ��parse_config_file�������������������������ڷ�����������init.rcΪ����
[-->parser.c]
int parse_config_file(const char *fn)
{
char *data;
data = read_file(fn, 0);//��ȡ�����ļ������ݣ�����ļ���init.rc��
if (!data) return -1;
parse_config(fn,data); //����parse_config�������Ľ���
return 0;
}
��ȡ���ļ������ݺ�����parse_config���н�������������Ĵ���������ʾ��
[-->parser.c]
static void parse_config(const char *fn, char*s)
{
struct parse_state state;
char *args[SVC_MAXARGS];
int nargs;
nargs = 0;
state.filename = fn;
state.line = 1;
state.ptr = s;
state.nexttoken = 0;
state.parse_line = parse_line_no_op; //���ý�����������ͬ�������ò�ͬ�Ľ�������
for (;;) {
switch(next_token(&state)) {
case T_EOF:
state.parse_line(&state, 0, 0);
return;
caseT_NEWLINE:
if (nargs) {
//�õ��ؼ��ֵ�����
int kw = lookup_keyword(args[0]);
if (kw_is(kw, SECTION)) { //�жϹؼ��������Dz���SECTION��
state.parse_line(&state,0, 0);
parse_new_section(&state,kw, nargs, args);//�������SECTION��
} else {
state.parse_line(&state, nargs, args);
}
nargs = 0;
}
break;
case T_TEXT:
......
break;
}
}
}
�������parse_config������������̣�ʵ��ȴ�Ƚϸ��ӡ���������˵��parse_config���Ȼ��ҵ������ļ���һ��section��Ȼ����Բ�ͬ�� sectionʹ�ò�ͬ�Ľ�����������������ô��ʲô��section�أ����init.rc�ļ�����֯�ṹ�йء��Ȳ��ؼ���ȥ��init.rc�������ȵ�������ȥѰ�Ҵ𰸡�
1. �ؼ��ֶ���
keywords.h����ļ�������init��ʹ�õĹؼ��֣������÷�������˼������������ļ�������������ʾ��
[-->keywords.h]
#ifndef KEYWORD //���û�ж���KEYWORD�꣬��������ķ�֧
......//����һЩ��������Щ��������ǰ����˵Action��ִ�к�����
int do_class_start(int nargs, char **args);
int do_class_stop(int nargs, char **args);
......
int do_restart(int nargs, char **args);
......
#define __MAKE_KEYWORD_ENUM__ //����һ����
/*
����KEYWORD�꣬��Ȼ���ĸ���������������ֻ�õ�һ��������K_##symbol�е�##��ʾ����
����˼�������õ���ֵΪK_symbol��symbol��ʵ����init.rc�еĹؼ���
*/
#define KEYWORD(symbol, flags, nargs, func)K_##symbol,
enum { //����һ��ö�٣����ö�ٶ����˸����ؼ��ֵ�ö��ֵ��
K_UNKNOWN,
#endif
......
//��������KEYWORD�Ķ��壬���ォ�õ�һ��ö��ֵK_class,
KEYWORD(class, OPTION, 0, 0)
KEYWORD(class_start, COMMAND, 1, do_class_start)//K_class_start,
KEYWORD(class_stop, COMMAND, 1, do_class_stop)//K_class_stop,
KEYWORD(on, SECTION, 0, 0)//K_on��
KEYWORD(oneshot, OPTION, 0, 0)
KEYWORD(onrestart, OPTION, 0, 0)
KEYWORD(restart, COMMAND, 1,do_restart)
KEYWORD(service, SECTION, 0,0)
......
KEYWORD(socket, OPTION, 0, 0)
KEYWORD(start, COMMAND, 1,do_start)
KEYWORD(stop, COMMAND, 1,do_stop)
......
#ifdef __MAKE_KEYWORD_ENUM__
KEYWORD_COUNT,
};
#undef __MAKE_KEYWORD_ENUM__
#undef KEYWORD //ȡ��KEYWORD�궨��
#endif
keywords.h����ûʲô���أ������Ǹ���ͷ�ļ���Ϊʲô˵�����÷�������˼�أ����������������ʹ�����ģ�������ʾ��
[-->parser.c]
......//parser.c�н�����keywords.hͷ�ļ������һ���ֻһ�Σ���
//��һ�ΰ���keywords.h������keywords.h�Ĵ��룬�������Ȼ�õ�һ��ö�ٶ���
#include "keywords.h"
/*
���¶���KEYWORD�꣬����ĸ�����ȫ�����ˣ�������������һ���ṹ�塣����#symbol��ʾ
һ���ַ�������ֵΪ��symbol����
*/
#define KEYWORD(symbol, flags, nargs, func) \
[K_##symbol ] = { #symbol, func, nargs + 1, flags, },
//����һ���ṹ��keyword_info���飬�����������ؼ��ֵ�һЩ���ԣ���ע�������ע�����ݡ�
struct {
constchar *name; //�ؼ��ֵ�����
int(*func)(int nargs, char **args);//��Ӧ�ؼ��ֵĴ���������
unsignedchar nargs;//����������ÿ���ؼ��ֵIJ��������ǹ̶��ġ�
//�ؼ��ֵ����ԣ����������ԣ�COMMAND��OPTION��SECTION������COMMAND�ж�Ӧ�Ĵ�������
unsigned char flags;
} keyword_info[KEYWORD_COUNT] = {
[ K_UNKNOWN ] = { "unknown", 0, 0, 0},
/*
�ڶ��ΰ���keywords.h�������Ѿ����¶���KEYWORD�꣬������ǰ��Щ��Ϊö��ֵ�Ĺؼ���
���ڱ��keyword_info����������ˡ�
*/
#include "keywords.h"
};
#undef KEYWORD
//һЩ�����꣬�������ǿ��ٲ���keyword_info�е����ݡ�
#define kw_is(kw, type) (keyword_info[kw].flags& (type))
#define kw_name(kw) (keyword_info[kw].name)
#define kw_func(kw) (keyword_info[kw].func)
#define kw_nargs(kw) (keyword_info[kw].nargs)
����������keywords.h������֮���˰ɣ�ԭ���������������飺
�� ��һ�ΰ���keyworks.hʱ����������һЩ����do_classstart�����ĺ��������������һ��ö�٣�ö��ֵΪK_class��K_mkdir�ȹؼ��֡�
�� �ڶ��ΰ���keywords.h�õ���һ��keyword_info�ṹ�����飬���keyword_info�ṹ��������ǰ�涨���ö��ֵΪ�������洢��Ӧ�Ĺؼ�����Ϣ����Щ��Ϣ�����ؼ��������������������������IJ����������Լ����ԡ�
Ŀǰ���ؼ�����Ϣ������Ҫ�ľ���symbol��flags�ˡ�ʲô���Ĺؼ��ֱ���Ϊ��section�أ�����keywords.h�Ķ��壬symbolΪ���������Ĺؼ��ֱ�ʾsection��
KEYWORD(on, SECTION, 0, 0)
KEYWORD(service, SECTION, 0, 0)
���������֪ʶ�������������ļ�init.rc�����ݡ�
2. init.rc�Ľ���
init.rc������������ʾ�������ǽ�ȡ�˲������ݣ�ע�⣬���е�ע�ͷ�����#����
[-->init.rc]
on init #��������ķ�����on�ؼ��ֱ�ʾһ��section����Ӧ�������ǡ�init��
...... #�������е����ݶ��������section��ֱ����һ��section��ʼʱ��
exportPATH /sbin:/system/sbin:/system/bin:/system/xbin
exportLD_LIBRARY_PATH /system/lib
exportANDROID_BOOTLOGO 1 #����keywords.h�Ķ��壬export��ʾһ��COMMAND
export ANDROID_ROOT /system
exportANDROID_ASSETS /system/app
...... #ʡ�Բ�������
on boot #����һ���µ�section����Ϊ��boot��
ifup lo#����һ��COMMAND
hostname localhost
domainname localdomain
......
#class_startҲ��һ��COMMAND����Ӧ����Ϊdo_class_start������Ҫ���мǡ�
class_startdefault
......
#�������section����˼�ǣ�������persist.service.adb.enable��ֵ��Ϊ1��
#��Ҫִ�ж�Ӧ��COMMAND�����COMMAND��start adbd
onproperty:persist.service.adb.enable=1
start adbd //start��һ��COMMAND
on property:persist.service.adb.enable=0
stopadbd
......
#serviceҲ��section�ı�ʾ����Ӧsection����Ϊ��zygote��
service zygote /system/bin/app_process -Xzygote/system/bin �Czygote \
--start-system-server
socketzygote stream 666 #socket�ؼ��ֱ�ʾOPTION
onrestart write /sys/android_power/request_state wake #onrestartҲ��OPTION
onrestart write /sys/power/state on
onrestart restart media
#һ��section����Ϊ��media��
service media /system/bin/mediaserver
usermedia
groupsystem audio camera graphics inet net_bt net_bt_admin net_raw
iopriort 4
�������init.rc�ķ����п�֪��
�� һ��section�����ݴ������ʾsection�Ĺؼ��ֿ�ʼ������һ����ʾsection�ĵط�������
�� init.rc�г�������Ϊboot��init��section�������boot��init������ǰ����ܵĶ���ִ���ĸ����е�boot��init��Ҳ����˵����boot��ִ�еĶ���������boot���section����ġ�
����ɷ��֣�zygote��������һ��servicesection�С�������zygote���sectionΪ��������service����ν����ġ�
3.2.2 ����service
zygote��Ӧ��service section�����ǣ�
[-->init.rc::zygote]
service zygote /system/bin/app_process -Xzygote/system/bin �Czygote \ --start-system-server
socketzygote stream 666 #socket��OPTION
#�����onrestart��OPTION����write��restart��COMMAND
onrestartwrite /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestartrestart media
����section����ں�����parse_new_section�����Ĵ���������ʾ��
[-->parser.c]
void parse_new_section(struct parse_state*state, int kw,
int nargs, char **args)
{
switch(kw) {
caseK_service: //����service����parse_service��parse_line_service
state->context = parse_service(state, nargs, args);
if(state->context) {
state->parse_line = parse_line_service;
return;
}
break;
caseK_on: //����on section
......//���߿����Լ��о�
break;
}
state->parse_line = parse_line_no_op;
}
���У�service����ʱ���õ���parse_service��parse_line_service�����������ڷֱ��������֮ǰ���ȿ�init�������֯���service�ġ�
1. service�ṹ��
init��ʹ����һ����service�Ľṹ���������service section��ص���Ϣ��������������ṹ�壬����������ʾ��
[-->init.h::service�ṹ�嶨��]
struct service {
//listnode��һ������Ľṹ�壬���ں˴������õ÷dz��࣬��Ҫ�������ṹ�����ӳ�һ��
//˫��������init����һ��ȫ�ֵ�service_list��ר������������������ļ���õ���service��
struct listnode slist;
constchar *name; //service�����֣���Ӧ����������Ӿ��ǡ�zygote����
constchar *classname; //service����class�����֣�Ĭ���ǡ�defult��
unsigned flags;//service������
pid_tpid; //���̺�
time_ttime_started; //��һ��������ʱ��
time_ttime_crashed; //��һ��������ʱ��
intnr_crashed; //��������
uid_tuid; //uid,gid���
gid_tgid;
gid_tsupp_gids[NR_SVC_SUPP_GIDS];
size_tnr_supp_gids;
/*
��Щservice��Ҫʹ��socket���������socketinfo��������socket�������Ϣ��
���ǵ�zygoteҲʹ����socket�������ļ��е�������socket zygote stream 666��
����ʾ������һ��AF_STREAM���͵�socket����ʵ����TCP socket������socket����Ϊ��zygote����
��дȨ����666��
*/
structsocketinfo *sockets;
//serviceһ�������ڵ�����һ�������У�envvars�������������������ʱ����Ļ���������Ϣ��
structsvcenvinfo *envvars;
/*
��Ȼ�ؼ���onrestart��ʾһ��OPTION���������OPTION����һ�����COMMAND��
�������action�ṹ��������洢command��Ϣ�����Ͼͻ����������
*/
structaction onrestart;
//��keychord��ص�����
int*keycodes;
intnkeycodes;
intkeychord_id;
//io���ȼ�����
intioprio_class;
intioprio_pri;
//��������
intnargs;
//���ڴ洢����
char*args[1];
};
�����������˽��service�Ľṹ�壬�����˵�������������ġ���zygote�е�������onrestart����ô��ʾ�أ��뿴service��ʹ�õ����action�ṹ�壺
[-->init.h::action�ṹ�嶨��]
struct action {
/*
һ��action�ṹ��ɴ��������˫�������У�����alist���ڴ洢����action��
qlist����������Щ�ȴ�ִ�е�action��tlist����������Щ��ijЩ���������
����Ҫִ�е�action��
*/
structlistnode alist;
structlistnode qlist;
structlistnode tlist;
unsigned hash;
constchar *name;
//���OPTION��Ӧ��COMMAND��������zygoteΪ������������onrestart option������
//����Ӧ�ᴴ������command�ṹ�塣
structlistnode commands;
structcommand *current;
};
�˽��������֪ʶ�����Ƿ��ܲµ�parse_service��parse_line_service���������أ����Ͼ��������ǡ�
2. parse_service
parse_service�Ĵ���������ʾ��
[-->parser.c]
static void *parse_service(struct parse_state*state, int nargs, char **args)
{
structservice *svc; //����һ��service�ṹ��
......
//initά����һ��ȫ�ֵ�service���������ж��Ƿ��Ѿ���ͬ����service�ˡ�
svc =service_find_by_name(args[1]);
if(svc) {
...... //�����ͬ����service�����ܼ�������IJ�����
return 0;
}
nargs-= 2;
svc =calloc(1, sizeof(*svc) + sizeof(char*) * nargs);
......
svc->name = args[1];
svc->classname= "default";//����classnameΪ��default��������ܹؼ���
memcpy(svc->args, args + 2, sizeof(char*) * nargs);
svc->args[nargs] = 0;
svc->nargs = nargs;
svc->onrestart.name= "onrestart";
list_init(&svc->onrestart.commands);
//��zygote���service�ӵ�ȫ������service_list�С�
list_add_tail(&service_list, &svc->slist);
returnsvc;
}
parse_service����ֻ�Ǵ��һ��service�ļ��ӣ���������������ɺ���Ľ�����������䡣����service������һ����������parse_line_service��
3. parse_line_service
parse_line_service�Ĵ���������ʾ��
[-->parser.c]
static void parse_line_service(structparse_state *state, int nargs,
char **args)
{
structservice *svc = state->context;
structcommand *cmd;
int i,kw, kw_nargs;
......
svc->ioprio_class = IoSchedClass_NONE;
//��ʵ���Ǹ��ݹؼ����������ִ�����
kw =lookup_keyword(args[0]);
switch(kw) {
caseK_capability:
break;
caseK_class:
if(nargs != 2) {
......
}else {
svc->classname = args[1];
}
break;
......
caseK_oneshot:
/*
����service�����ԣ���һ����������ԣ��ֱ�Ϊ��
SVC_DISABLED������class�Զ����������潫�ῴ��class�����á�
SVC_ONESHOT���˳�����Ҫ������Ҳ�������serviceֻ����һ�ξͿ����ˡ�
SVC_RUNNING���������У�����service��״̬��
SVC_RESTARTING���ȴ���������Ҳ��service��״̬��
SVC_CONSOLE����service��Ҫʹ�ÿ���̨ ��
SVC_CRITICAL������ڹ涨ʱ���ڸ�service������������ϵͳ������������ָ�ģʽ��
zygoteû��ʹ���κ����ԣ����������������class�Ĵ����Զ�������
�˳������init��������ʹ�ÿ���̨����ʹ��������Ҳ���ᵼ��ϵͳ����ָ�ģʽ��
*/
svc->flags |= SVC_ONESHOT;
break;
caseK_onrestart: //����onrestart�����ݣ����action�ṹ�������
nargs--;
args++;
kw= lookup_keyword(args[0]);
......
//����command�ṹ��
cmd = malloc(sizeof(*cmd) + sizeof(char*) * nargs);
cmd->func = kw_func(kw);
cmd->nargs = nargs;
memcpy(cmd->args, args, sizeof(char*) * nargs);
//���½���command���뵽˫�������С�
list_add_tail(&svc->onrestart.commands, &cmd->clist);
break;
......
caseK_socket: { //����socket�����Ϣ
struct socketinfo *si;
......
si= calloc(1, sizeof(*si));
if(!si) {
parse_error(state, "out of memory\n");
break;
}
si->name = args[1]; //socket������
si->type = args[2]; //socket������
si->perm = strtoul(args[3], 0, 8); //socket�Ķ�дȨ��
if(nargs > 4)
si->uid = decode_uid(args[4]);
if(nargs > 5)
si->gid = decode_uid(args[5]);
si->next = svc->sockets;
svc->sockets = si;
break;
}
......
default:
parse_error(state, "invalid option '%s'\n", args[0]);
}
}
parse_line_service�����������ļ����������service�ṹ�壬��ô��zygote��������õ�ʲô�أ�ͼ3-1��ʾ��zygote������Ľ����
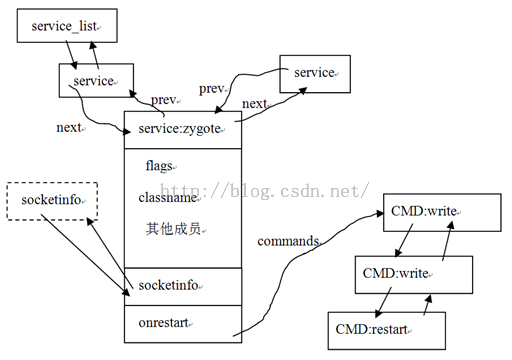
ͼ3-1 zygote�������ʾ��ͼ
����ͼ�п�֪��
�� service_list�������������serviceȫ�����ӵ���һ�𣬲�����һ��˫��������ǰ��ڵ���prev��ʾ������ڵ���next��ʾ��
�� socketinfoҲ��һ��˫����������Ϊzygoteֻ��һ��socket�����Ի���һ�����socket��Ϊ������ʾ����
�� onrestartͨ��commandsָ��һ��commands������zygote������commands��
zygote���service�������ˣ����ھ��ǡ����¾㱸��ֻǷ���硱�ˡ�������Ҫ�˽���ǣ�init����ο���service�ġ�
3.2.3 init����service
�ȿ�service����������ġ�
1������zygote
init.rc��������һ�仰��
#class_start��һ��COMMAND����Ӧ�ĺ���Ϊdo_class_start������Ҫ���мǡ�
class_startdefault
class_start��ʾһ��COMMAND����Ӧ�Ĵ�������Ϊdo_class_start����λ��boot section�ķ�Χ�ڡ�Ϊʲô˵������Ҫ�أ�
���ǵ�init�����е��ĸ�ִ�н��𣿵�init����ִ�е����漸�仰ʱ��do_class_start�ͻᱻִ���ˡ�
//��bootsection�ڵ�command���뵽ִ�ж���
action_for_each_trigger("boot",action_add_queue_tail);
//ִ�ж���������class����һ��COMMAND����������Ӧ��do_class_start�ᱻִ�С�
drain_action_queue();
��������do_class_start������
[-->builtins.c]
int do_class_start(int nargs, char **args)
{
/*
argsΪdo_class_start�IJ�����init.rc��ֻ��һ������������default��
���������������service_list��Ѱ��classnameΪ��default����service��Ȼ��
����service_start_if_not_disabled���������ڶ���������service�ṹ����
classname����������
*/
service_for_each_class(args[1],service_start_if_not_disabled);
return 0;
}
�����Ѿ�֪����zygote���service��classname��ֵ���ǡ�default�������Ի�������service����service_start_if_not_disabled����������Ĵ����ǣ�
[-->parser.c]
static void service_start_if_not_disabled(structservice *svc)
{
if (!(svc->flags & SVC_DISABLED)) {
service_start(svc,NULL); //zygote��û������SVC_DISABLED
}
}
service_start�����Ĵ���������ʾ��
[-->init.c]
void service_start(struct service *svc, constchar *dynamic_args)
{
structstat s;
pid_tpid;
intneeds_console;
int n;
svc->flags &= (~(SVC_DISABLED|SVC_RESTARTING));
svc->time_started = 0;
if(svc->flags & SVC_RUNNING) {
return;//������service�������У����ô���
}
/*
serviceһ������������һ�������У��������Ҳ��init���ӽ��̣���������serviceǰ��Ҫ�ж�
��Ӧ�Ŀ�ִ���ļ��Ƿ���ڣ�zygote��Ӧ�Ŀ�ִ���ļ���/system/bin/app_process
*/
if(stat(svc->args[0], &s) != 0) {
svc->flags |= SVC_DISABLED;
return;
}
......
pid =fork(); //����fork�����ӽ���
if(pid == 0) {
//pidΪ�㣬�������ӽ�����
struct socketinfo *si;
struct svcenvinfo *ei;
char tmp[32];
int fd, sz;
//�õ����Դ洢�ռ����Ϣ���ӵ����������У����������Է���һ���л�����ʹ�����ĵط���
get_property_workspace(&fd, &sz);
add_environment("ANDROID_PROPERTY_WORKSPACE", tmp);
//���ӻ���������Ϣ
for (ei = svc->envvars; ei; ei = ei->next)
add_environment(ei->name, ei->value);
//����socketinfo����socket
for (si = svc->sockets; si; si = si->next) {
int s = create_socket(si->name,
!strcmp(si->type,"dgram") ?
SOCK_DGRAM :SOCK_STREAM,
si->perm,si->uid, si->gid);
if (s >= 0) {
//�ڻ�������������socket��Ϣ��
publish_socket(si->name, s);
}
}
......//����uid��gid��
setpgid(0, getpid());
if(!dynamic_args) {
/*
ִ��/system/bin/app_process�������ͽ��뵽app_process��main�������ˡ�
fork��execve��������������Linuxϵͳ�ϳ��õ�ϵͳ���á�
*/
if (execve(svc->args[0], (char**)svc->args, (char**) ENV) < 0) {
......
}
}else {
......
}
......//������init�Ĵ���������service����Ϣ��������ʱ�䡢���̺ţ��Լ�״̬�ȡ�
svc->time_started = gettime();
svc->pid = pid;
svc->flags |= SVC_RUNNING;
//ÿһ��service����һ�����ԣ�zygote������Ϊinit.svc.zygote��������������ֵΪrunning
notify_service_state(svc->name, "running");
}
ԭ����zygote��ͨ��fork��execv��ͬ�����ģ���service�ṹ�е��Ǹ�onrestart����û�������ó���ԭ����ڣ�
2. ����zygote
�������֣��Ϳɲµ�onrestartӦ������zygote����ʱ�õġ������ȿ���zygote�������ĸ�����init����ʲô������
[-->init.c]
static void sigchld_handler(int s)
{ //���ӽ����˳�ʱ��init������źŴ��������ᱻ����
write(signal_fd, &s, 1); //��signal_fd write����
}
signal_fd��������init��ͨ��socketpair����������socket�е�һ������Ȼ�������signal_fd�з������ݣ���ô����һ��socket��һ���ܽ��յ��������ͻᵼ��init��poll�����з��أ�
[-->init.rc::main��������Ƭ��]
nr =poll(ufds, fd_count, timeout);
......
if(ufds[2].revents == POLLIN) {
read(signal_recv_fd, tmp, sizeof(tmp));
while (!wait_for_one_process(0))//����wait_for_one_process��������
;
continue;
}
......
//ֱ�ӿ����wait_for_one_process������
static int wait_for_one_process(int block)
{
pid_tpid;
intstatus;
structservice *svc;
structsocketinfo *si;
time_tnow;
structlistnode *node;
structcommand *cmd;
while( (pid = waitpid(-1, &status, block ? 0 : WNOHANG)) == -1 &&
errno == EINTR );
if(pid <= 0) return -1;
//�ҵ��������Ǹ�service������Ӧ���ҵ��˴���zygote���Ǹ�service��
svc = service_find_by_pid(pid);
......
if(!(svc->flags & SVC_ONESHOT)) {
//ɱ��zygote�����������ӽ��̣������zygote����Java���������ԭ��
kill(-pid, SIGKILL);
}
//����socket��Ϣ��������Ķ��߿���ͨ������man 7 AF_UNIX��ѯһ�����֪ʶ��
for(si = svc->sockets; si; si = si->next) {
char tmp[128];
snprintf(tmp, sizeof(tmp), ANDROID_SOCKET_DIR"/%s",si->name);
unlink(tmp);
}
svc->pid = 0;
svc->flags &= (~SVC_RUNNING);
if(svc->flags & SVC_ONESHOT) {
svc->flags |= SVC_DISABLED;
}
......
now= gettime();
/*
���������SVC_CRITICAL��ʾ����4�����ڸ÷��������������ܳ���4�Σ�����
��������������recoveryģʽ������init.rc�����ã�ֻ��servicemanager����
���д��ִ�����
*/
if(svc->flags & SVC_CRITICAL) {
if(svc->time_crashed + CRITICAL_CRASH_WINDOW >= now) {
if (++svc->nr_crashed > CRITICAL_CRASH_THRESHOLD) {
......
sync();
__reboot(LINUX_REBOOT_MAGIC1,LINUX_REBOOT_MAGIC2,
LINUX_REBOOT_CMD_RESTART2, "recovery");
return 0;
}
}else {
svc->time_crashed = now;
svc->nr_crashed = 1;
}
}
svc->flags |= SVC_RESTARTING;
//���ñ�ʾΪSVC_RESTARTING,Ȼ��ִ�и�service onrestart�е�COMMAND����Щ���ݾ�
//�dz����ˣ����߿�������ѧϰ��
list_for_each(node, &svc->onrestart.commands) {
cmd = node_to_item(node, struct command, clist);
cmd->func(cmd->nargs, cmd->args);
}
//����init.svc.zygote��ֵΪrestarting��
notify_service_state(svc->name, "restarting");
return0;
}
ͨ������Ĵ��룬��֪��onrestart�������ˣ���zygote�������������������أ��𰸾�������Ĵ����У�
[-->init.c::main��������Ƭ��]
for(;;) {
int nr, i, timeout = -1;
for (i = 0; i < fd_count; i++)
ufds[i].revents = 0;
drain_action_queue(); //poll�������غ������һ�ֵ�ѭ��
restart_processes(); //�������������flag��־ΪSVC_RESTARTING��service��
......
}
������zygote�ֻ����ˣ�
3.2.4 ���Է���
����֪����Windowsƽ̨����һ����ע����Ķ�����ע������Դ洢һЩ����key/value�ļ�ֵ�ԡ�һ����ԣ�ϵͳ��ijЩӦ�ó������Լ���һЩ���Դ洢��ע����У���ʹ�´�ϵͳ������Ӧ�ó��������������ܹ�����֮ǰ��ע��������õ����ԣ�������Ӧ�ij�ʼ��������Androidƽ̨Ҳ�ṩ��һ�����ͻ��ƣ��ɳ�֮Ϊ���Է���property service����Ӧ�ó����ͨ��������Ի��ƣ���ѯ���������ԡ����߿�����adb shell��¼�������ģ�����ϣ�Ȼ����getprop����鿴��ǰϵͳ������Щ���ԡ������ҵ�HTC G7���Խ������ͼ3-2��ʾ����ͼ��ֻ��ʾ�˲������ԣ�
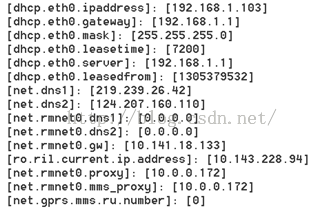
ͼ3-2 HTC G7����ʾ��ͼ
������Է�������ôʵ�ֵ��أ������������룬������init.c�����Է����йصĴ������������У�
property_init();
property_set_fd = start_property_service();
�ֱ����������ǡ�
1. ���Է����ʼ��
��1�������洢�ռ�
�ȿ�property_init����������������ʾ��
[-->property_service.c]
void property_init(void)
{
init_property_area();//��ʼ�����Դ洢����
//����default.prop�ļ�
load_properties_from_file(PROP_PATH_RAMDISK_DEFAULT);
}
��properyty_init�����У��ȵ���init_property_area����������һ�����ڴ洢���ԵĴ洢����Ȼ�����default.prop�ļ��е����ݡ��ٿ�init_property_area����ι����ģ����Ĵ���������ʾ��
[-->property_service.c]
static int init_property_area(void)
{
prop_area *pa;
if(pa_info_array)
return -1;
/*
��ʼ���洢�ռ䣬PA_SIZE�����洢�ռ���ܴ�С��Ϊ32768�ֽ�,pa_workspace
Ϊworkspace���͵Ľṹ�壬���������Ķ��壺
typedef struct {
void *data; //�洢�ռ����ʼ��ַ
size_tsize; //�洢�ռ�Ĵ�С
int fd; //�����ڴ���ļ�������
} workspace;
init_workspace��������Androidϵͳ�ṩ��ashmem_create_region��������һ��
�����ڴ档���ڹ����ڴ��֪ʶ�����ڵ�7�»�Ӵ������ֻ���������һ����ͨ���ڴ��
�����ˡ�
*/
if(init_workspace(&pa_workspace, PA_SIZE))
return -1;
fcntl(pa_workspace.fd, F_SETFD, FD_CLOEXEC);
//��32768���ֽڵĴ洢�ռ��У���PA_INFO_START��1024�����ֽ������洢ͷ����Ϣ
pa_info_array = (void*) (((char*) pa_workspace.data) + PA_INFO_START);
pa =pa_workspace.data;
memset(pa, 0, PA_SIZE);
pa->magic = PROP_AREA_MAGIC;
pa->version = PROP_AREA_VERSION;
//__system_property_area__���������bionic libc���������ʲô���أ�
__system_property_area__ = pa;
return0;
}
��������ݱȽϼ��������ĸ�ֵ�����Ǵ�����ͷ��__system_property_area__��bionic libc���������һ��������Ϊʲô����Ҫ������ֵ�أ�
ԭ������Ȼ������������init���̴�������Androidϵͳϣ����������Ҳ�ܶ�ȡ����ڴ���Ķ�����Ϊ������һ�㣬�������������������
�� �����������ڹ����ڴ��ϣ��������ڴ��ǿ��Կ���̵ġ���һ�㣬�Ѿ�������Ĵ����м����ˣ�init_workspace�����ڲ���������������ڴ档
�� �������������֪����������ڴ��أ�Android������gcc��constructor���ԣ��������ָ����һ��__libc_prenit��������bionic libc�ⱻ����ʱ�����Զ��������__libc_prenit����������ڲ��ͽ���ɹ����ڴ浽���ؽ��̵�ӳ�乤����
��2���ͻ��˽��̻�ȡ�洢�ռ�
������������ݣ�������ش��룺
[-->libc_init_dynamic.c]
//constructor����ָʾ���������ظÿ�����ȵ���__libc_prenit��������һ���Windows��
//��̬���DllMain��������
void __attribute__((constructor))__libc_prenit(void);
void __libc_prenit(void)
{
......
__libc_init_common(elfdata); //�����������
......
}
__libc_init_common������
[-->libc_init_common.c]
void __libc_init_common(uintptr_t *elfdata)
{
......
__system_properties_init();//��ʼ���ͻ��˵����Դ洢����
}
[-->system_properties.c]
int __system_properties_init(void)
{
prop_area *pa;
int s,fd;
unsigned sz;
char*env;
.....
//���ǵ�������zygoteһ�����ᵽ�����ӻ��������ĵط������Դ洢����������Ϣ
//�������Ƕ����ӵģ�������Ҫȡ����ʹ���ˡ�
env =getenv("ANDROID_PROPERTY_WORKSPACE");
//ȡ�����Դ洢������ļ������������ڹ����ڴ��֪ʶ����7���н�����н��ܡ�
fd =atoi(env);
env =strchr(env, ',');
if(!env) {
return -1;
}
sz =atoi(env + 1);
//ӳ��init�������ǿ��ڴ浽���ؽ��̿ռ䣬�������ؽ��̾Ϳ���ʹ����鹲���ڴ��ˡ�
//ע�⣬ӳ���ʱ��ָ����PROT_READ���ԣ����Կͻ��˽���ֻ�ܶ����ԣ��������������ԡ�
pa =mmap(0, sz, PROT_READ, MAP_SHARED, fd, 0);
if(pa== MAP_FAILED) {
return -1;
}
if((pa->magic != PROP_AREA_MAGIC) || (pa->version !=PROP_AREA_VERSION)) {
munmap(pa, sz);
return -1;
}
__system_property_area__ = pa;
return0;
}
��������кܶ�ط������ڴ��йأ��ڵ�7���л���빲���ڴ��й�������н��ܣ�����Ҳ������ѧϰ�йع����ڴ��֪ʶ��
��֮��ͨ�����ַ�ʽ���ͻ��˽��̿���ֱ�Ӷ�ȡ���Կռ䣬��û��Ȩ���������ԡ��ͻ��˽�������������������أ�
2. �������Է�����
��1���������Է�����
init���̻�����һ�����Է����������ͻ���ֻ��ͨ�������Է��������������������ԡ����������Է����������ݣ�����start_property_service��������������������ʾ��
[-->Property_servie.c]
int start_property_service(void)
{
intfd;
/*
���������ļ�����ʵ���ǽ�����Щ�ļ��е����ԣ�Ȼ��������õ����Կռ���ȥ��Androidϵͳ
һ���ṩ���ĸ��洢���Ե��ļ������Ƿֱ��ǣ�
#definePROP_PATH_RAMDISK_DEFAULT "/default.prop"
#define PROP_PATH_SYSTEM_BUILD "/system/build.prop"
#define PROP_PATH_SYSTEM_DEFAULT "/system/default.prop"
#define PROP_PATH_LOCAL_OVERRIDE "/data/local.prop"
*/
load_properties_from_file(PROP_PATH_SYSTEM_BUILD);
load_properties_from_file(PROP_PATH_SYSTEM_DEFAULT);
load_properties_from_file(PROP_PATH_LOCAL_OVERRIDE);
//��һЩ��������Ҫ���浽���ý����ϵģ���Щ�����ļ�������������������أ���Щ�ļ�
//�洢��/data/propertyĿ¼�£�������Щ�ļ����ļ���������persist.��ͷ���������
//�ܼ����߿������о���
load_persistent_properties();
//����һ��socket������IPCͨ�š�
fd =create_socket(PROP_SERVICE_NAME, SOCK_STREAM, 0666, 0, 0);
if(fd< 0) return -1;
fcntl(fd, F_SETFD, FD_CLOEXEC);
fcntl(fd, F_SETFL, O_NONBLOCK);
listen(fd, 8);
returnfd;
}
���Է�����һ���������������socket����������������ﱻ�����أ���ʵ�ϣ���init�е�forѭ�������Ѿ�������ش����ˡ�
��2������������������
��������ĵط�����init�����У�����������ʾ��
[-->init.c::main����Ƭ��]
if (ufds[1].revents == POLLIN)
handle_property_set_fd(property_set_fd);
�����Է������յ��ͻ�������ʱ��init�����handle_property_set_fd���д�������������Ĵ���������ʾ��
[-->property_service.c]
void handle_property_set_fd(int fd)
{
prop_msg msg;
int s;
int r;
intres;
structucred cr;
structsockaddr_un addr;
socklen_t addr_size = sizeof(addr);
socklen_t cr_size = sizeof(cr);
//�Ƚ���TCP����
if ((s= accept(fd, (struct sockaddr *) &addr, &addr_size)) < 0) {
return;
}
//ȡ���ͻ��˽��̵�Ȩ�����ԡ�
if(getsockopt(s, SOL_SOCKET, SO_PEERCRED, &cr, &cr_size) < 0) {
......
return;
}
//������������
r = recv(s,&msg, sizeof(msg), 0);
close(s);
......
switch(msg.cmd) {
casePROP_MSG_SETPROP:
msg.name[PROP_NAME_MAX-1] = 0;
msg.value[PROP_VALUE_MAX-1] = 0;
/*
�����ctl��ͷ����Ϣ������Ϊ�ǿ�����Ϣ��������Ϣ����ִ��һЩ���������
adb shell��¼������setprop ctl.start bootanim�Ϳ��Բ鿴���������ˣ�
�رյĻ�������setpropctl.stop bootanim���Dz��Ǻ�����˼�أ�
*/
if(memcmp(msg.name,"ctl.",4) == 0) {
if (check_control_perms(msg.value, cr.uid, cr.gid)) {
handle_control_message((char*) msg.name + 4, (char*) msg.value);
}
......
}else {
//���ͻ��˽����Ƿ����㹻��Ȩ��
if (check_perms(msg.name, cr.uid, cr.gid)) {
//Ȼ�����property_set���á�
property_set((char*) msg.name, (char*) msg.value);
}
......
}
break;
default:
break;
}
}
���ͻ��˵�Ȩ������Ҫ��ʱ��init�͵���property_set������ش�������������Ƚϼ�����������ʾ��
[-->property_service.c]
int property_set(const char *name, const char*value)
{
prop_area *pa;
prop_info *pi;
intnamelen = strlen(name);
intvaluelen = strlen(value);
......
//�����Դ洢�ռ���Ѱ���Ƿ��Ѿ����ڸ�����
pi =(prop_info*) __system_property_find(name);
if(pi!= 0) {
//�����������ro.��ͷ�����ʾ��ֻ���ģ��������ã�����ֱ�ӷ��ء�
if(!strncmp(name, "ro.", 3)) return -1;
pa= __system_property_area__;
//���¸����Ե�ֵ
update_prop_info(pi, value, valuelen);
pa->serial++;
__futex_wake(&pa->serial, INT32_MAX);
}else {
//���û���ҵ���Ӧ�����ԣ�����Ϊ���������ԣ�������Ҫ�´���һ�ע�⣬Android֧��
//���247�����ԣ����Ŀǰ���ԵĴ洢�ռ����Ѿ���247���ֱ�ӷ��ء�
pa= __system_property_area__;
if(pa->count == PA_COUNT_MAX) return -1;
pi= pa_info_array + pa->count;
pi->serial = (valuelen << 24);
memcpy(pi->name, name, namelen + 1);
memcpy(pi->value, value, valuelen +1);
pa->toc[pa->count] =
(namelen << 24) | (((unsigned) pi) - ((unsigned) pa));
pa->count++;
pa->serial++;
__futex_wake(&pa->serial, INT32_MAX);
}
//��һЩ�����������Ҫ������������Ҫ����net.change��ͷ�����ԡ�
if(strncmp("net.", name, strlen("net.")) == 0) {
if(strcmp("net.change", name) == 0) {
return 0;
}
property_set("net.change", name);
} elseif (persistent_properties_loaded &&
strncmp("persist.", name,strlen("persist.")) == 0) {
//�����������persist.��ͷ������Ҫ����Щֵд����Ӧ�ļ���ȥ��
write_persistent_property(name, value);
}
/*
���ǵ�init.rc�е�������仰��
on property:persist.service.adb.enable=1
startadbd
��persist.service.adb.enable������Ϊ1�ͻ�ִ��start adbd���command��
����ͨ��property_changed��������ɵģ����dz������߿����Լ��Ķ���
*/
property_changed(name, value);
return0;
}
�ã����Է���˵Ĺ����Ѿ��˽��ˣ����濴�ͻ���������������Եġ�
��3���ͻ��˷�������
�ͻ���ͨ��property_set��������property_set��libcutils���ṩ������������ʾ��
[-->properties.c]
int property_set(const char *key, const char*value)
{
prop_msg msg;
unsigned resp;
......
msg.cmd = PROP_MSG_SETPROP;//������Ϣ��ΪPROP_MSG_SETPROP��
strcpy((char*) msg.name, key);
strcpy((char*) msg.value, value);
//��������
returnsend_prop_msg(&msg);
}
static int send_prop_msg(prop_msg *msg)
{
int s;
int r;
//���������Է�������socket����
s =socket_local_client(PROP_SERVICE_NAME,
ANDROID_SOCKET_NAMESPACE_RESERVED,
SOCK_STREAM);
if(s< 0) return -1;
//ͨ��socket���ͳ�ȥ
while((r = send(s, msg, sizeof(prop_msg), 0)) < 0) {
if((errno == EINTR) || (errno == EAGAIN)) continue;
break;
}
if(r== sizeof(prop_msg)) {
r= 0;
} else{
r= -1;
}
close(s);
returnr;
}
���ˣ����Է������ͽ������ˡ�������˵������Ƚϼ�
3.3 ������
���½�����init������ν���zygote���Լ����Է������Ĺ���ԭ����ּ�ڰ���������ʶ������ֺŵ�һ���̡���������˵��init.rc�Ľ����Ѷ����������Ŷ���ͨ������ʵ���������Ѿ�������init.rc�Ľ���ԭ�������⣬inti�漰�ܶ��Linuxϵͳ��ص�֪ʶ������Ȥ�Ķ��߿��������о���
��Ȩ����������Ϊ����ԭ�����£�δ��������������ת�ء�
- 1¥u010850027���� 10:01
- ��л¥���ķ�����ѧϰ��`(*��_��*)��